
| ARUMO-SiR07M | ||||||
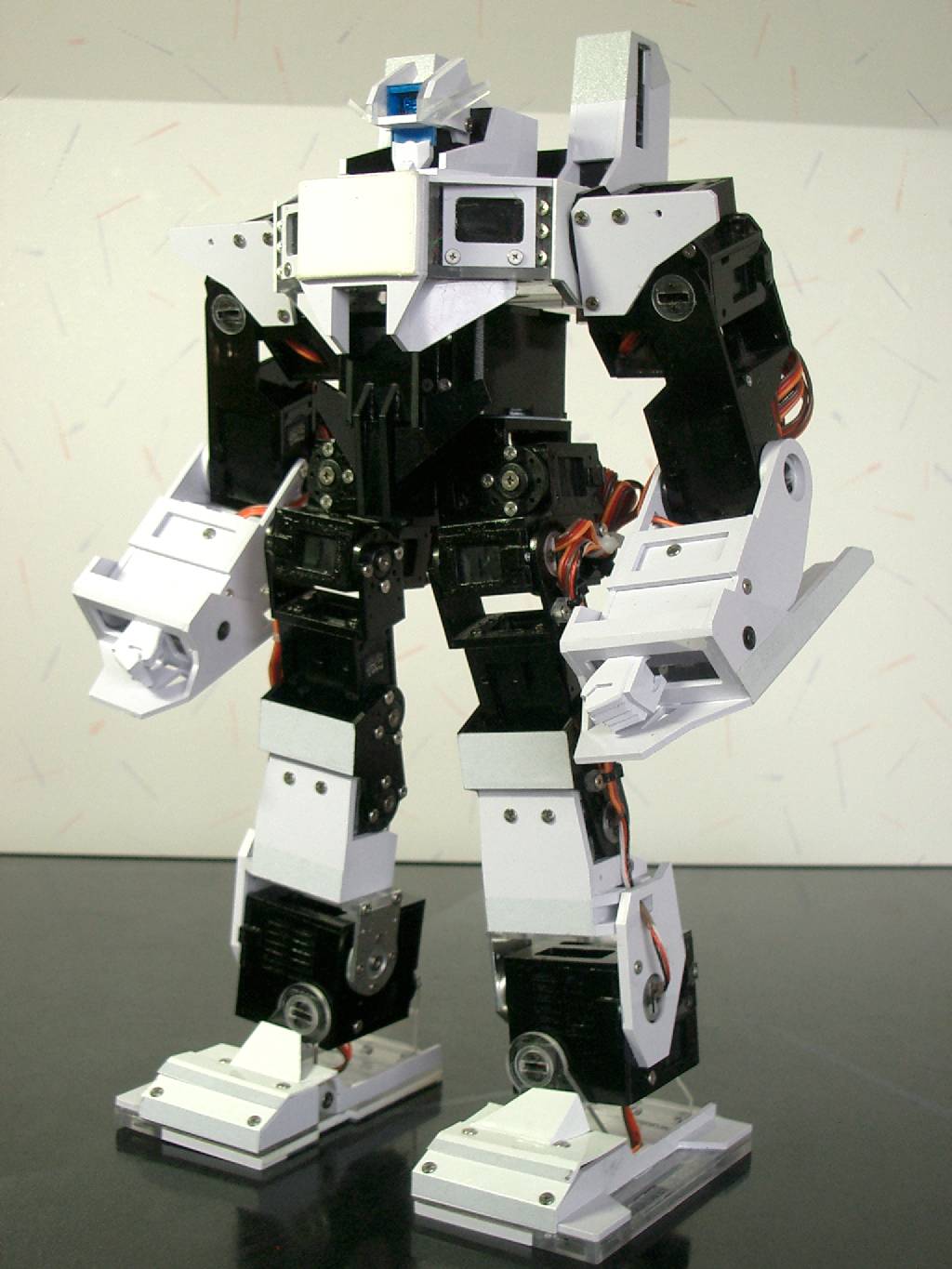
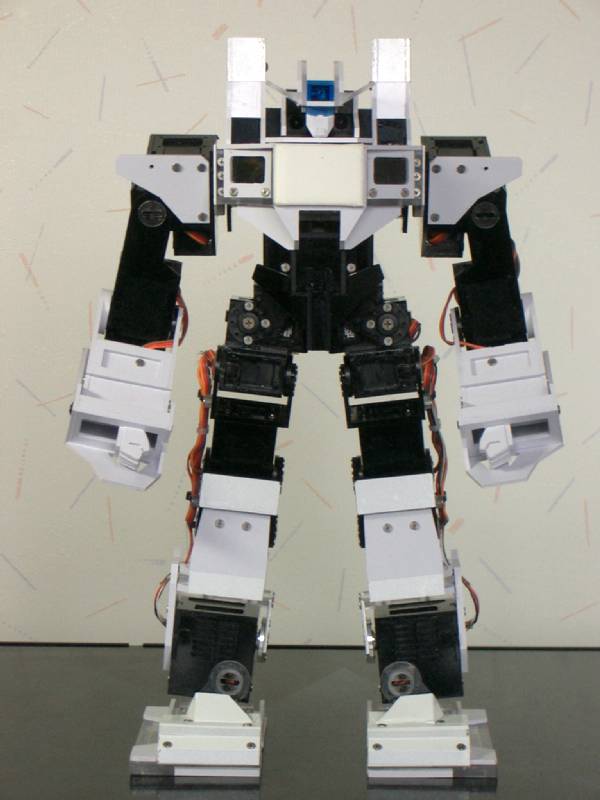
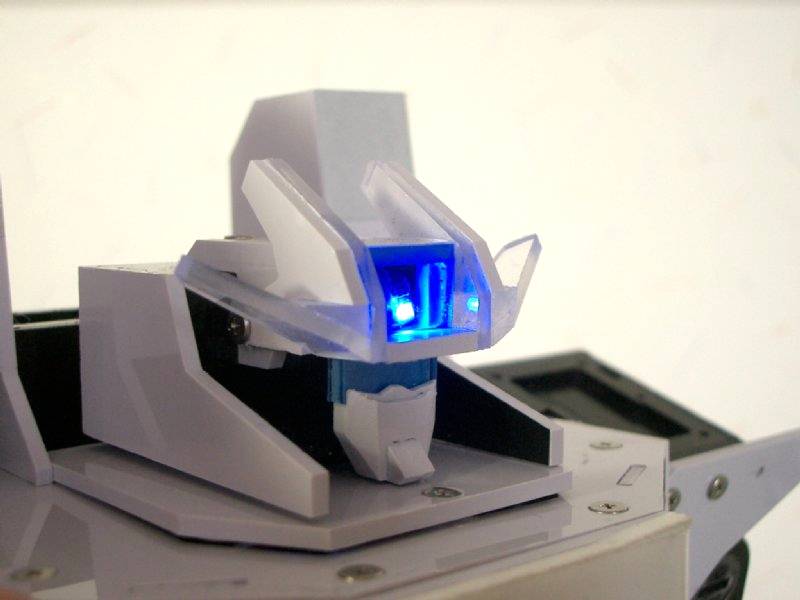
ROBO-ONE11thに出場した、ARUMO-SiR07Mの紹介です。
ARUMO-SiRシリーズはG-Tuneシリーズとは異なり、ヒーローロボットスタイルのヒューマノイドロボットで、 どんなことができるか?ということを探求するために開発した機体です。 ARUMO-SiRとしては05Aに続いて2作目となり、初めてのフルモデルチェンジとなります。
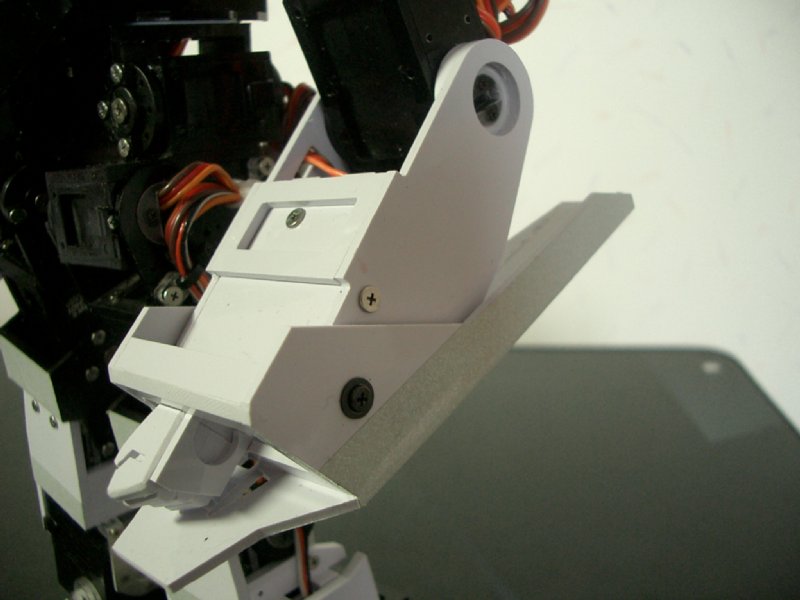
サーボはI-BEEさんのPRS-3401を主体として、DSR8801、WayPointのW-092MB、MiniStudioのRB50を使い、
全部で25個のサーボを使用しています。また、PRS-3401のおかげで非常にスリム(に見える)なデザインに
仕上げることができました。
結果は、予選は25位で通過するものの、初戦敗退という残念な結果になってしまいました。
|
|



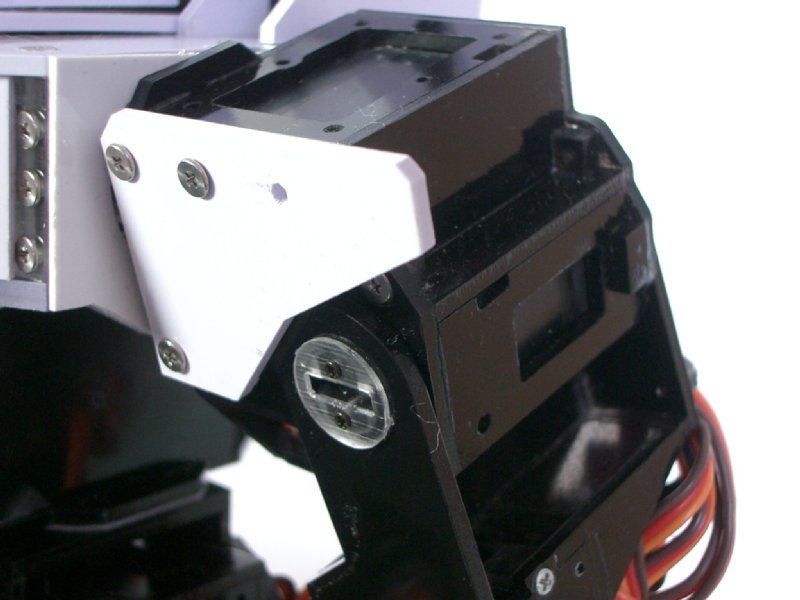
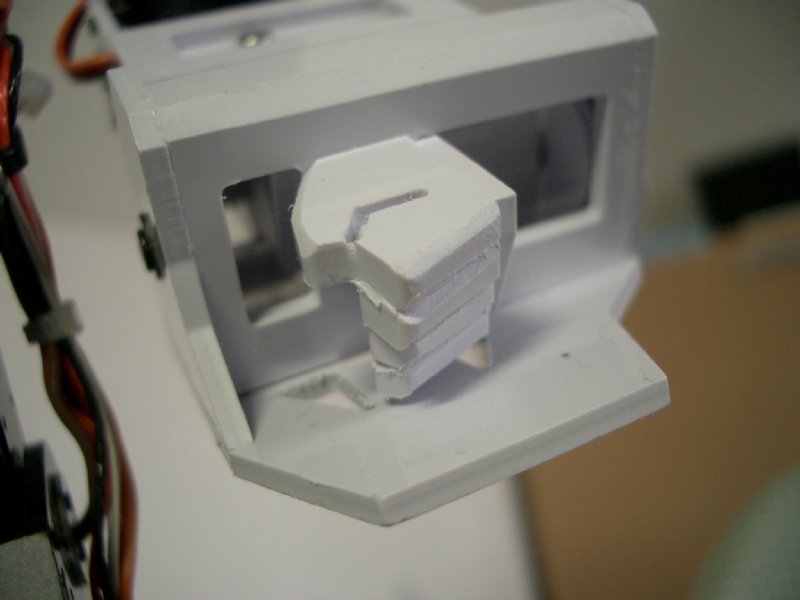
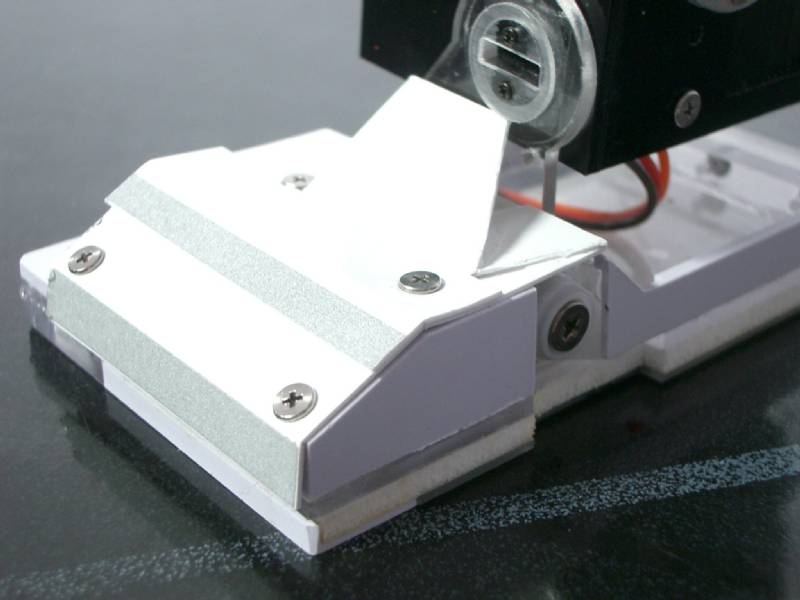
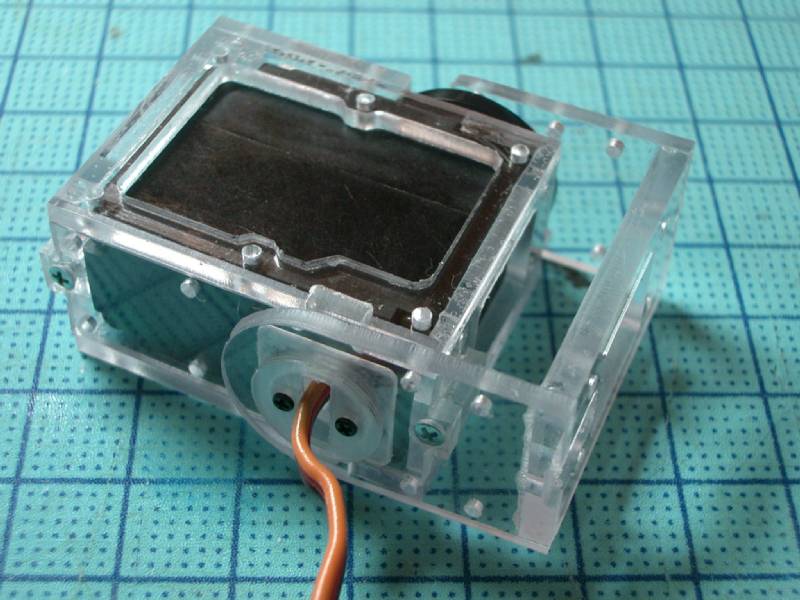
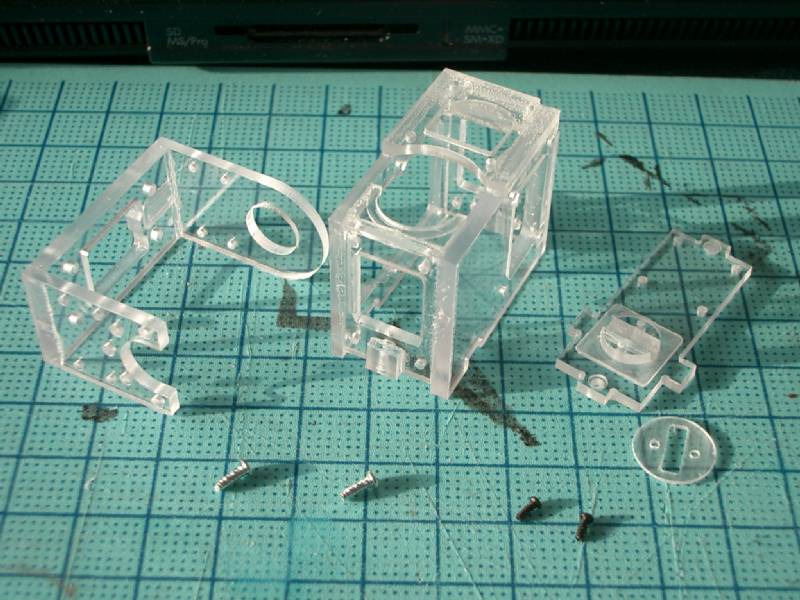
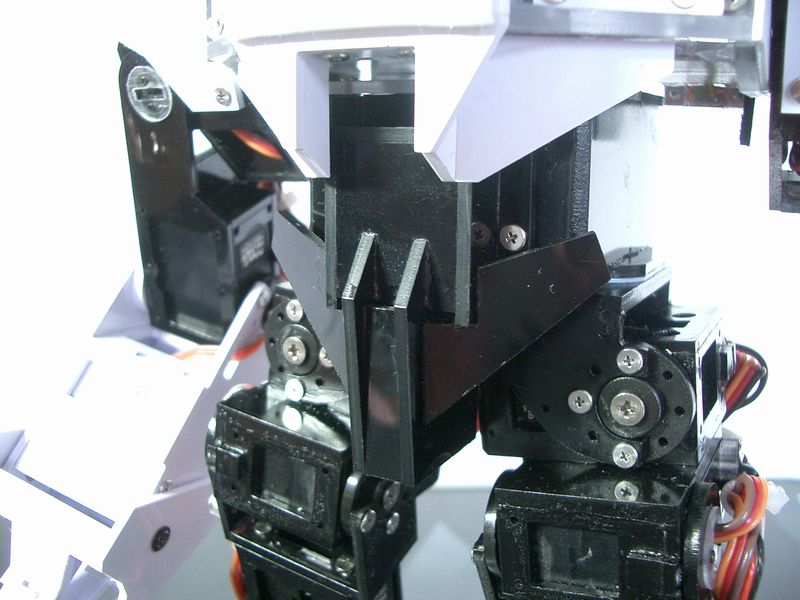
フレームは、下の写真のようなサーボホルダを基本として設計しています。ネジ2本はずすとサーボが抜けるようになっているのですが、
このホルダ、部品点数が多く、作るのが大変でした。単品で試作した時は気にならなかったのですが、いざ、
本体を組み立て始めて後悔しました。今後は、もう少し設計技術を鍛えて、なんとかしたいところです。


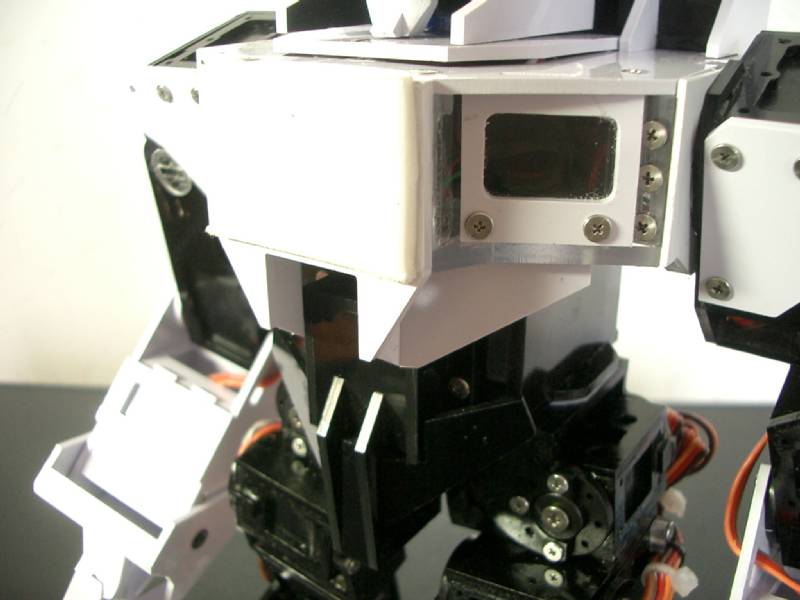
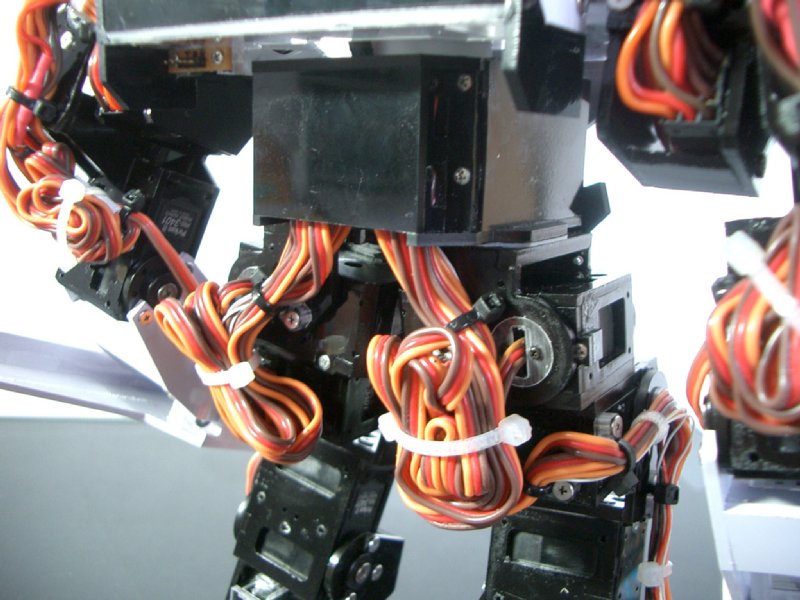
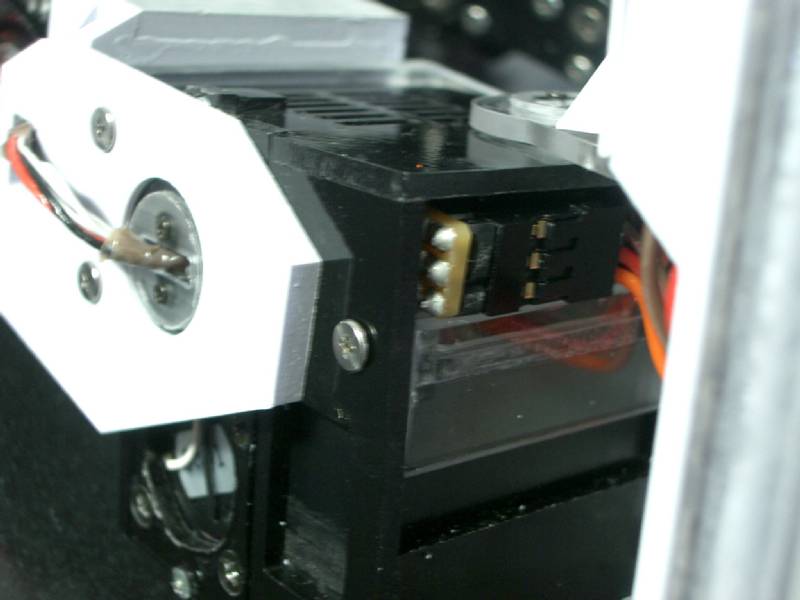
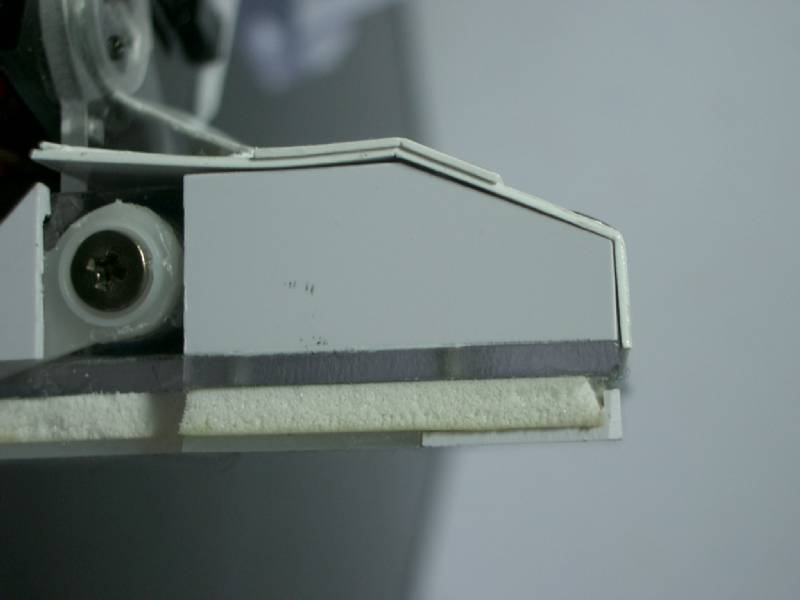
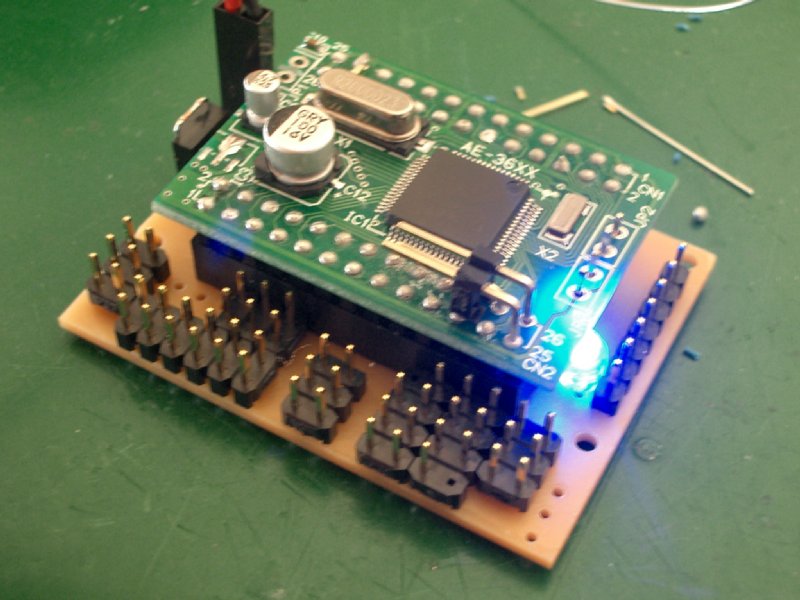
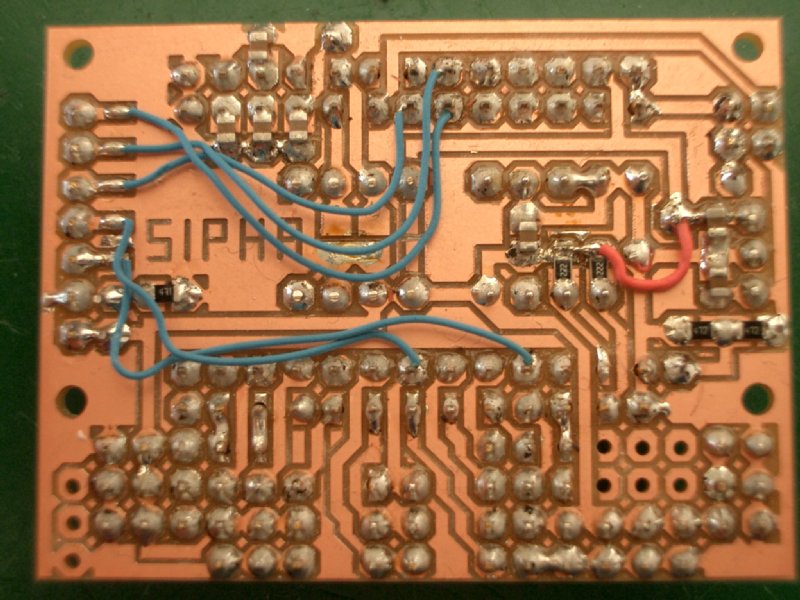
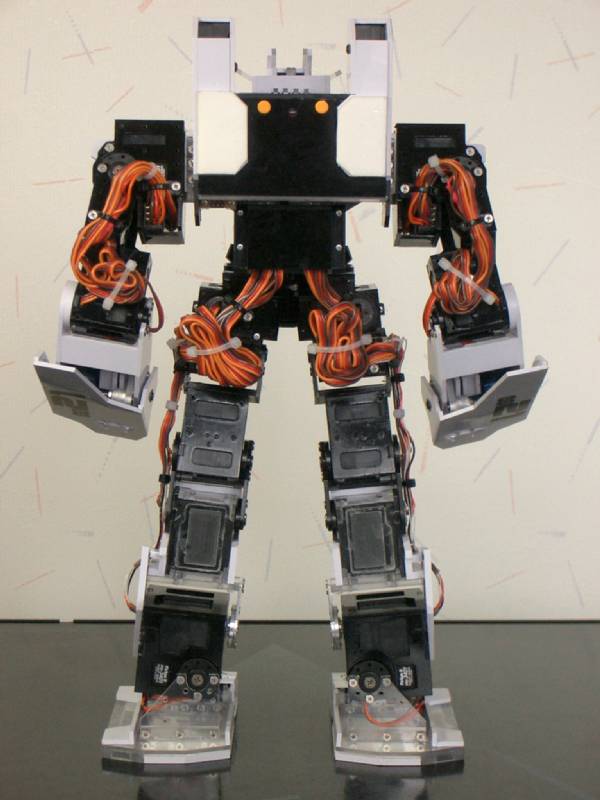
電線取りまわしについてですが、下半身サーボのリード線を一端、腰の中にある集線基板で集線しています。
時間の都合上、かなり手抜きな感じですが…。
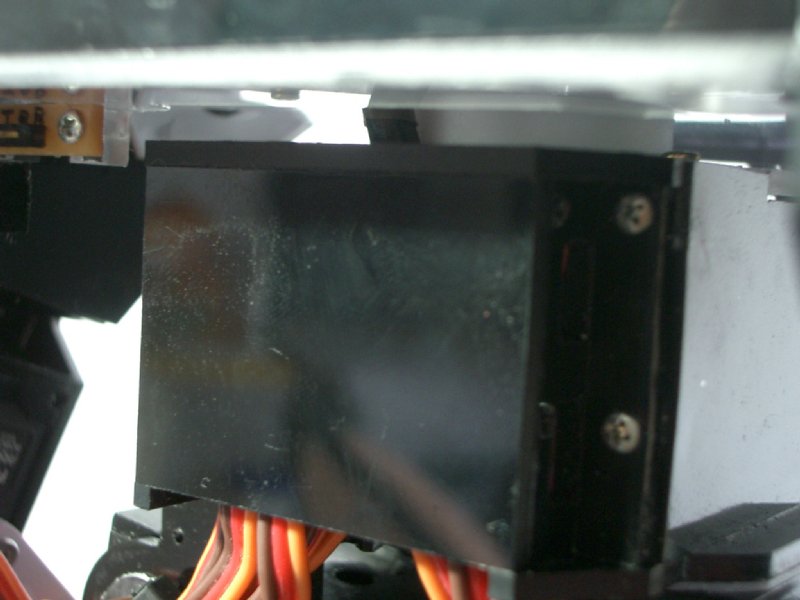
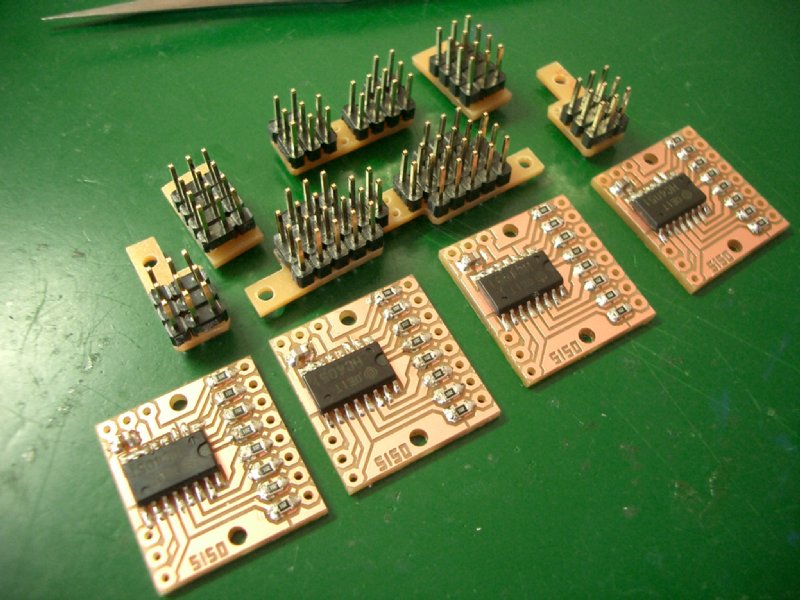
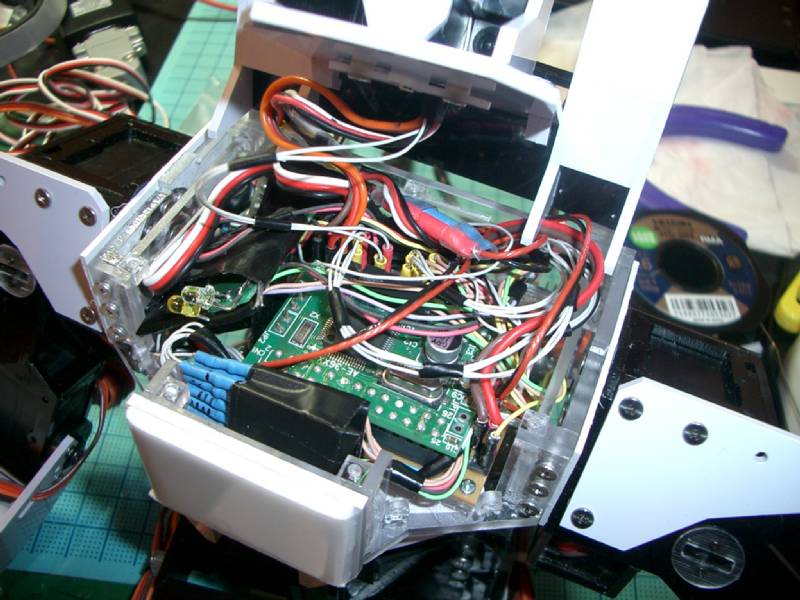
その後、マルチプレクサ基板を経由して高屈曲ワイヤにて上半身に持ち上げています。真ん中の写真で、
腰背面カバーの上あたりに、ちょこっと写っている黒いものが上半身とつながっている電線です。
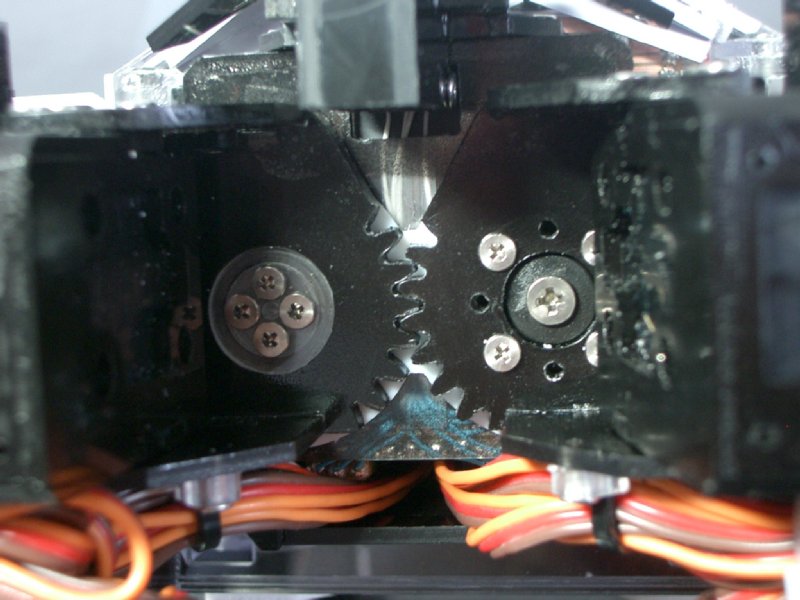
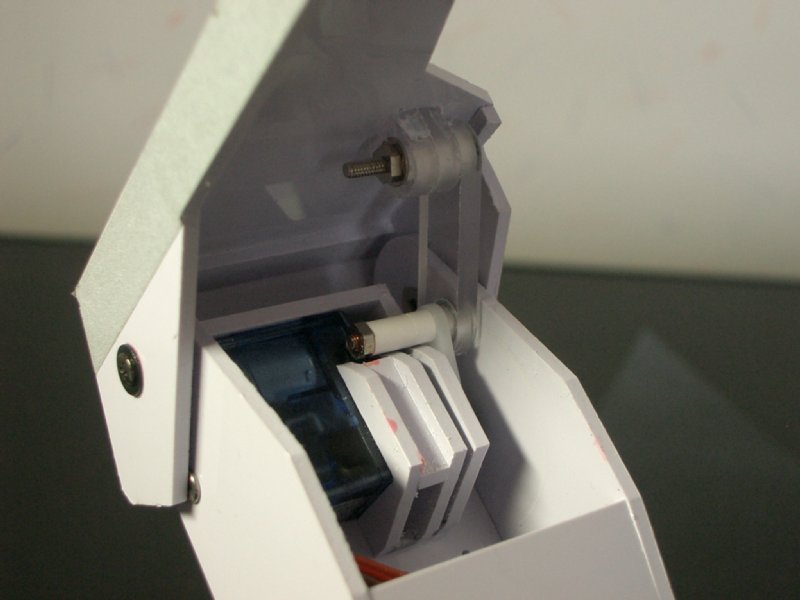
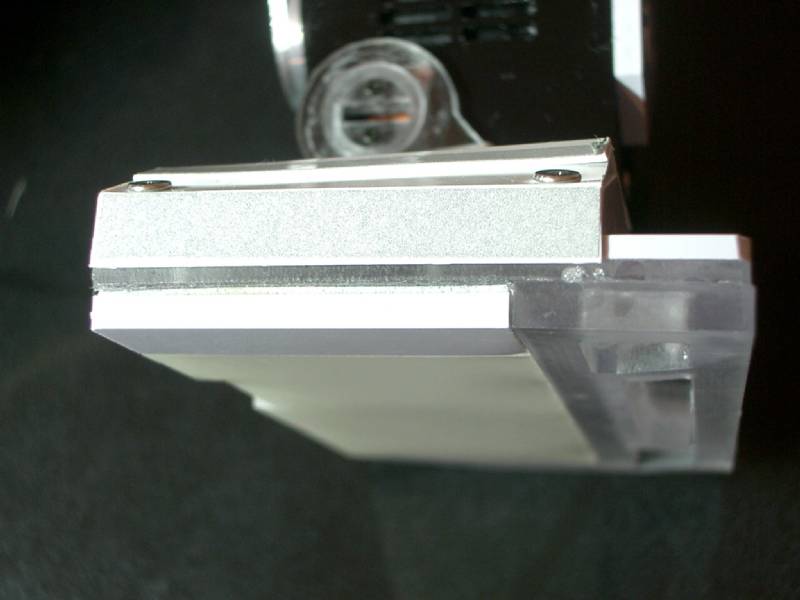
また、脚ヨー軸はサーボ1つで駆動しています。サーボアームをギア形状にする事で、
反対側のヨー軸に力を伝達しています。