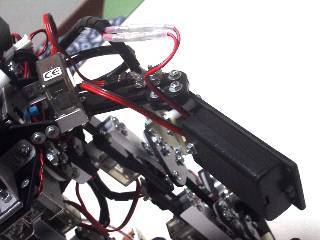
単純にサーボを2つつないでいるだけです。腕にはオプションパーツ取り付け用の穴がいくつかあいています。特に何をつけるかは決めていないんですが、指風のものがつけれるとかっこいいかも。先端についているボックスは単3電池ボックスです。
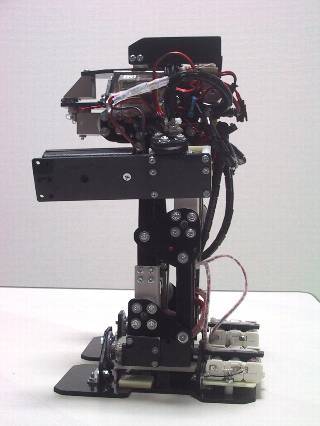
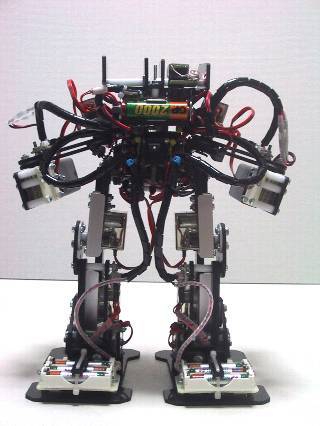
G-Tuneは、単3電池を両腕にそれぞれ2本、上半身に1本のせて、1.2V x 5本の6Vにしています。とても特徴有るレイアウトだと思うのですが、残念ながら2003/08現在では効果的に使えていません。
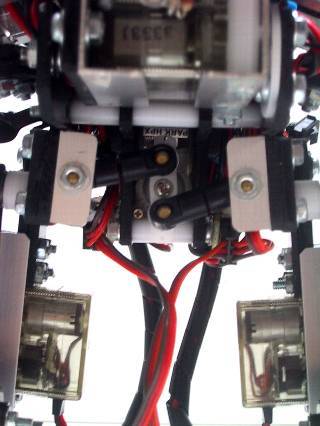
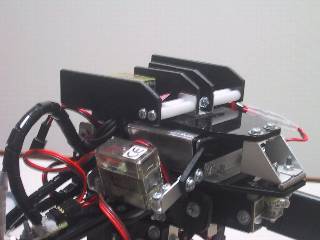
腰と股です。わかりにくいですが、写真上部のちょっとボケているクリアの物体が腰のサーボです。腰そのものはつけてもつけなくても良かったんですが、できれば「お辞儀」ができたほうがロボットとして愛嬌があるかなぁと思いまして、つけてみました。やっぱ、表現力は大事かなと思いまして。ここだけはなんと、サーボ軸が両持ちになっています。また、サーボはビスで固定せず、スペーサとビスで挟み込むことにより固定しています。
股間は、ラジコン用のジョイントを使用してサーボ1つで開脚動作をするようにしています。厳密には左右の開きが変わってしまうのですが、そもそもそんなに精度の良くないメカなので良しとしましょう。このジョイント、ねじると長さを調整できるので、とても便利です。加工精度が悪いので微妙にずれている右足と左足を、ここでちょっと調整しています。
ただ股間そのものはチョウツガイ(\120-…)で固定しているだけなため、かなりぐらつくので、スプリングをかまして押さえつけることでなんとかカチっとさせているのですが、動かすと「ぼよんぼよよん」してなんか難しいです。もっとかっちりとした方法はないもんかと検討中です。
あとこの写真だとわかりやすのですが、サーボ線は2chずつ接続できるコネクタをつけて、そこに接続しています。

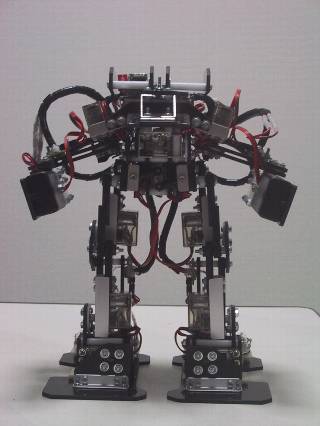
並行リンクを使用して、サーボを1つケチってます。サーボは片持ちにしています。今のところ特に問題はでていません。というのも、G-Tuneは、並行リンクのおかげで、サーボ軸のみで体重を支えているわけではなく、もう一方のABSフレームに力が分散されていくので、片持ちでもサーボホーンが壊れないのです。片持ちはなんといっても工作が簡単でいいです。
また、この並行リンクのおかげで、サーボが重量に負けて崩れるときでも、結果的にしゃがむだけで転倒しません。ある意味、安全設計!です。
ただし欠点もあります。脚が必ず平行に動きますので、起き上がり動作などで足裏を体の下に入れたくても、曲げる事ができません。まあ、安いアナログサーボでこれだけの大きさの体を支えようと思ったら、妥当な選択かと思います。
写真とってみたのですが、手持ちのデジカメのマクロが弱く、いまいち分かりやすいのが撮れないので、ここに写真を載せるのはやめておきます。