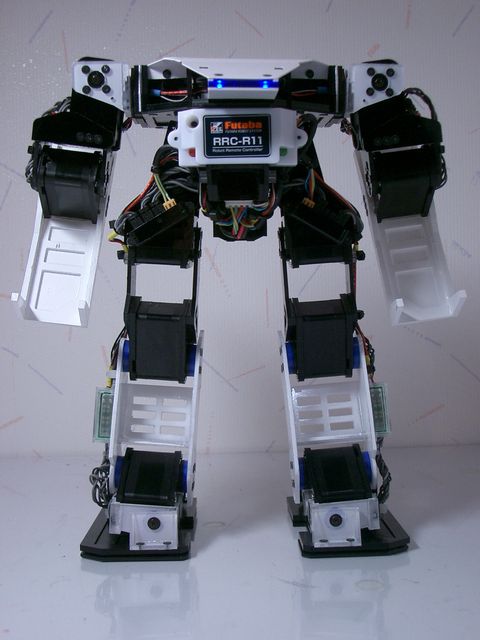
ROBO-ONE13th&宇宙大会選抜競技に出場した、G-TuneF108Mの紹介です。
残念ながらプログラム作成が間に合わず、ROBO-ONE13thは棄権、また宇宙大会選抜競技
にも出場したもの、一度も着地成功せず、とまあ、結果は振るわなかったのですが、
宇宙大会選抜競技では、着地点があと5cm手前だったら成功していたのにー、という、
結構、惜しい(おいしい?)結果となりました。また、宇宙大会選抜競技でありながら特化した
機体ではないことを評価していただけたのか、サンライズ賞とナガレンジャー賞を頂くことが
できました。
Basic Specification
- BASIC SPECIFICAION
身長23cm、体重0.93kg、自由度17(FUTABA RS301を17個使用…ROBO-ONE11thにてFUTABA賞で頂いたもの+自費購入って感じで)、
コントローラはRPU-10(3軸加速度センサ内臓)、KONGO ジャイロKRG-3x2、
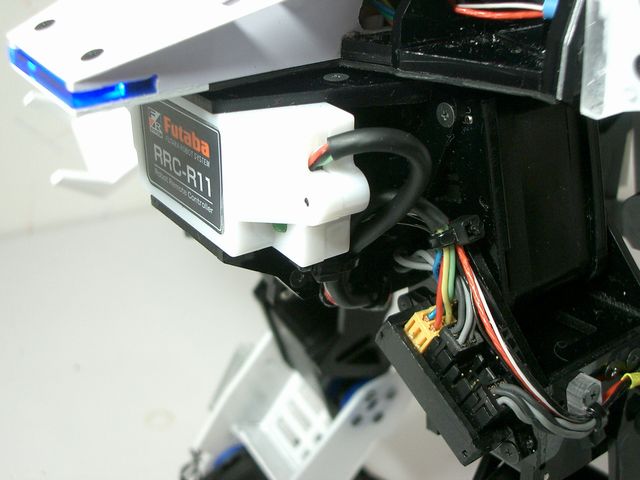
コントローラパッド受信側としてRRC-R11受信機を搭載し、
バッテリーはGR-001と同じPR-4S780Pを使用しています。
フレームは主にポリカーボネイト、一部CFRP、ABS、アクリル、塩ビ板、アルミ(A5052)を使用しています。
電源は、FUTABAのGR-001用のものをそのまま使用し、その他、ハブなども極力、GR-001のものをそのまま使用しています。
設計コンセプトとしては、なるべく標準的なものを使用できるよう、心がけました。おかげで苦労したところもありますが、
楽したところもあります。
宇宙大会選抜競技としてみた場合は、5分以上稼動できるバッテリとか、足と同じトルクを持つ腕、コントローラパッドの受信機など、
かなり余分なものがついていますが、フル装備のマシーンで立たせたかったので、このあたりの部品はすべて載せた状態で競技参加しました。
- CONTROL SYSTEM
- SIPHA SYSTEM - [SISO JUNK
STUDIO (LAB) INTELLIGENT PUPPET HANDLING ARCHITECTURE]
SISO JUNK STUDIOにて開発しているマシーン制御システムの総称です。
- SIPHA CORE
ハードウェアはFUTABA RPU-10を使用していますが、
Best Technologyにて配布されているGCC Developer LiteにRPU-10用ライブラリが同梱されており、
これを利用して再プログラミングしています。現時点では未完成で、すべての機能は使えませんが、
サーボ制御以外に、手抜き逆運動学計算処理などが実装されています。
- SIPHA TERM(PC側)
パソコン側の動作作成等の支援ソフトウェアで、フリーの開発統合環境である
WideStudioにて作成しています。
Design Detail
- MECHANICAL DESIGN
デザインは、G-Tuneシリーズの共通コンセプトである「メカニカルもののけ」としており、
脚は人間とは逆方向にヒザが曲がる、いわゆる「逆間接」を採用しています。
ROBO-ONE13thと宇宙大会選抜競技にダブルエントリーするために、足裏以外はROBO-ONE13thの超軽量級規定に
適合しており、また、150x150x100mmの格納姿勢をとることができます。この格納サイズが難関で、
本来、ROBO-ONE13th規定ならば腕の長さは脚の長さ(最上部のピッチ軸以下の長さ)の120%まで
許可されていますが、格納サイズに収まらなかったため、100%程度の長さになっています。
また、ROBO-ONE13thの重心規定を満たすために、随所、重心を上に上げる工夫をしています。




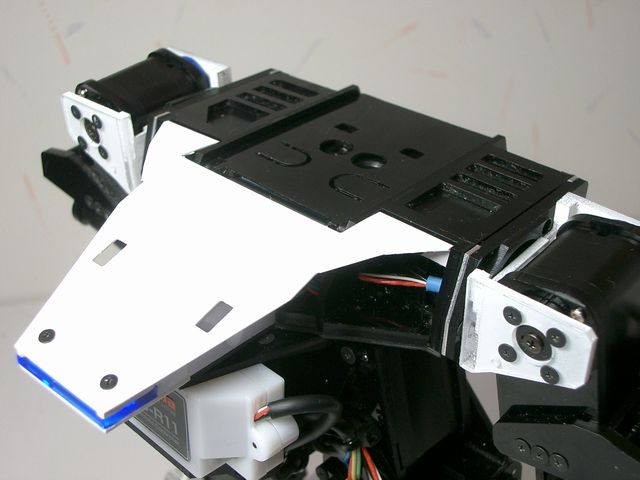
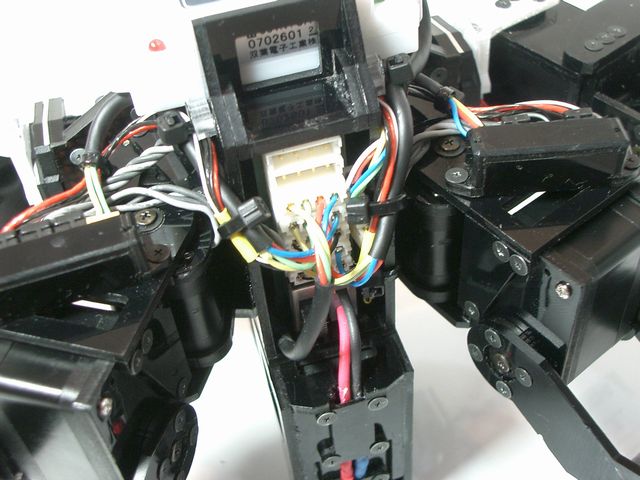
- CONTROL BLOCK
上半身の中心部分で、RPU-10、ジャイロセンサーなどが格納されています。
RPU-10は、カバーを開けずにRS232ケーブルの着脱、ボタン操作、ロータリースイッチ操作ができるように
形状が工夫してあり、プログラム入れ替えなどのメンテナンス性は良好です。
簡単に開けられるように設計したのですが、実際には開ける必要はまったくなく、
無駄な設計労力でした…(^_^;
このブロックのベースとなっているプレートはCFRPを使用しています。これは、格納姿勢時、
どうにもサイズが収まらなかったため、少しでも薄くするために使用しました。



また、目?にあたる部分のLEDは単なるON/OFFではなく、ふわふわと点滅することが可能です。
- SERVO JACKET
RS301をフレームに固定するため、「サーボジャケット」という標準的な部品を先に作成しました。
これは、RS301の上下に装着し、HPIから発売されている
アルミブラケットに付属する長いネジを使用して固定しています。サーボジャケットを使うことにより
サーボに平面を作ることができ、フレーム設計が楽になります。
(ねじについて個別に入手可能かどうかはわかりません…すいません。)

- BODY BLOCK
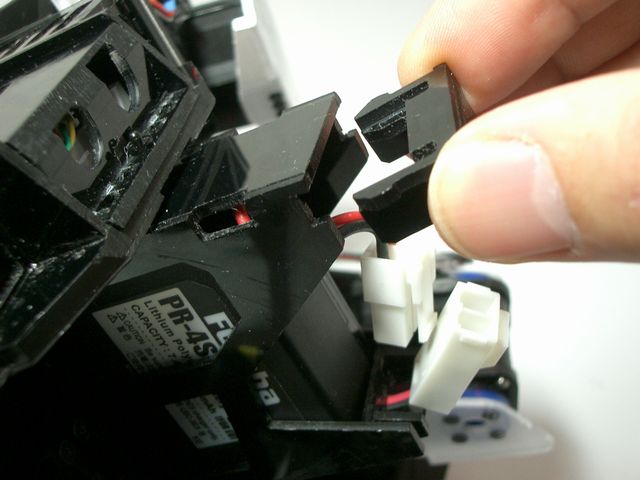
腰ヨー軸サーボ、モモロール軸サーボ、バッテリ、メインハブを搭載しています。
メインハブ、バッテリともにGR-001と同じものを使用しています。バッテリは、
うしろからはめ込み式パーツで固定するようになっており、簡易に交換可能になっています。
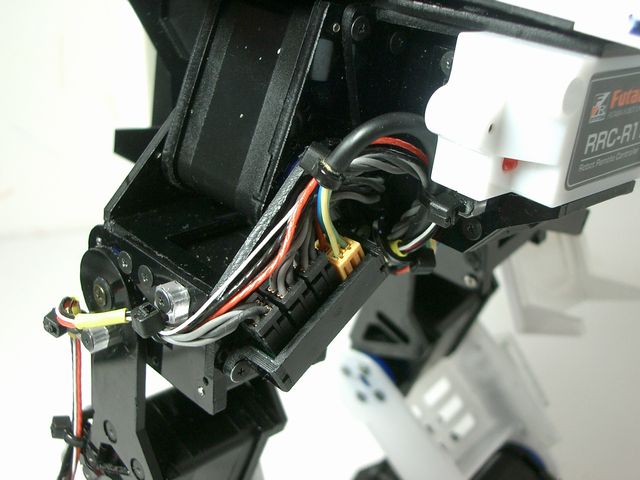
メインハブからの電線、及びRRC-R11からの電線は腰ヨー軸中央付近を通し、CONTROL BLOCKまで
持ち上げています。腰ヨー軸は270度以上可動させることができます。






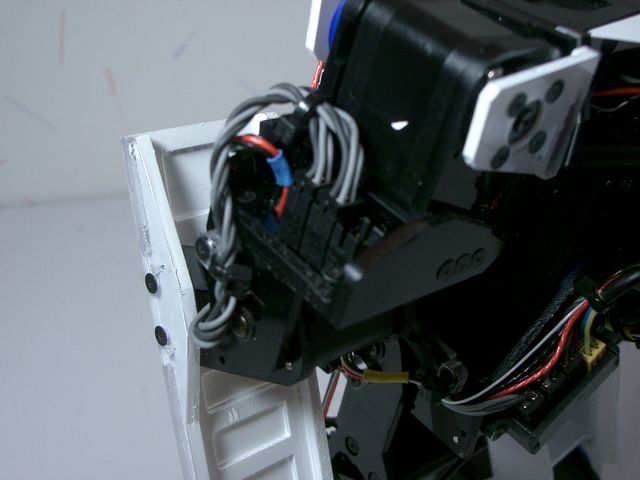
- ARM BLOCK
ROBO-ONE13th規定では120%まで良かったのですが、格納姿勢サイズの都合上100%の長さになっています。
サブハブを搭載しており肩ロール軸サーボ、肘ピッチ軸サーボをハブにて集線し、
集線後の電線は肩ピッチ軸サーボの軸の周りを沿わすようにCONTROL BLOCKへ引き込んでいます。
この構造により、肩は300度可動させることが可能になっています。


- LEG BLOCK
「逆間接」といいながら、90度程度までなら順方向にもヒザを曲げることができます。
格納姿勢を意識し、ひざを最大まで曲げたときにコンパクトになるように設計しています。
そのため、ふくらはぎのあたりが妙に空いていますが、これはヒザサーボが入り込むための
スペースとして確保しています。また、モモフレームなども微妙な形をしていますが、
すべては干渉を防ぐための形状です。


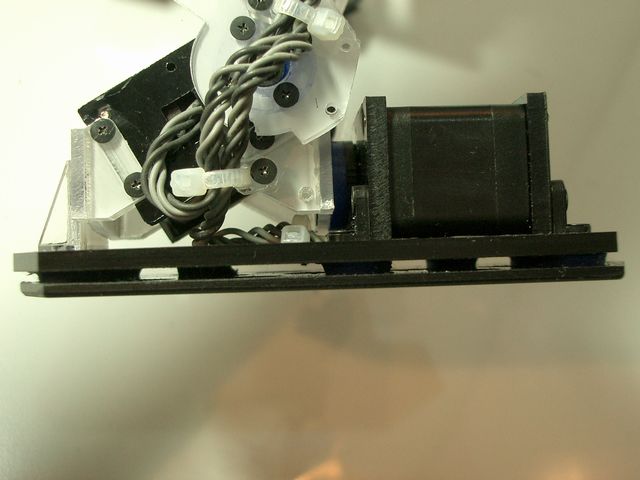
- FOOT BLOCK
ROBO-ONE13th用と宇宙大会選抜競技用で異なりますが、技術的には宇宙大会選抜競技用の足裏の方がおもしろいので、
こちらで説明します。足裏はサンドイッチ構造になっており、サーボと直結されている方はPOM、
ソルボセインを経由してポリカーボネイト製の足裏という構成になっています。
ソルボセインは、小さな丸型にして個数を調整することにより、反発力を調整できるようにしています。
当初、楽チンという理由から、全面をソルボセインで覆ってみたのですが、体重とのバランスで衝撃吸収力が薄れてしまったため、
このような形にして効果を調整できるようにしました。
また、フレーム側にPOMを使用した理由ですが、これまた格納姿勢の都合上、少しでも薄くするため、
ポリカーボネイトよりもPOMの方がいいかな(根拠無し)と思ってPOMにしています。
最大厚3mm、サーボがネジ止めされている部分は2mm厚です。

Action Movie
LEDが滑らかに点滅する様子と、格納姿勢からの変形なんぞ…。
SISO JUNK STUDIO Top