|
 MICRO-MGサーボジョイントは、GWS MICRO-MG用の、サーボとフレームを結合する部品です。NCフライスで作成していますが、
5面加工ということで若干難易度が高いところがあり、側面穴位置が0.1〜0.2mm程度の誤差がある場合があります
(まあ、NCフライス自体0.1mmぐらいの誤差はありますけど)が、手加工でロボットを作るには非常に便利なパーツです。 MICRO-MGサーボジョイントは、GWS MICRO-MG用の、サーボとフレームを結合する部品です。NCフライスで作成していますが、
5面加工ということで若干難易度が高いところがあり、側面穴位置が0.1〜0.2mm程度の誤差がある場合があります
(まあ、NCフライス自体0.1mmぐらいの誤差はありますけど)が、手加工でロボットを作るには非常に便利なパーツです。
現在、配布は終了していますが、モデラ等をお持ちで、ご自分で製作されたい方は、メールいただければDXFファイルとPDFファイルを配布いたします
(ロボット製作をホビーでやられている方ということでお願いいたします。SHOPやられている方でも、ホビー目的で作られたロボットに使用されるのであれば問題ありません)。
また、どうしてもご入用の場合、ご相談ください。
連絡お待ちしてま〜す。
|
このパーツは、「MICRO-MGを簡単にフレームに固定する」ために発明したものです。板材にサーボを固定する場合、アルミフレームの場合、曲げをいれてサーボミミのネジ穴を使って固定、ABSの場合はどうやったもんかな〜ということになりますが、これをMICRO-MGに装着すると、いろいろな方向からネジ止めできるようになりますので、ロボットの組み立てが簡単になります。現在、基本的な使用例だけですが、そのうちG-Tuneで使用した例もアップします。
基本的な使用方法


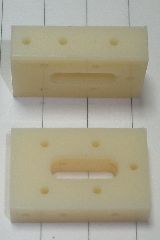
これがジョイントパーツの基本的な使い方です。MICRO-MGにM3のビスとブッシュで固定します。右の写真のとおり、ケーブルのゴムブッシュははずしてつけています。つけたままできないかな〜と、いろいろ設計ひねってみたのですが、うまく収まらず、現在のデザインになります。
で、この部品、6面にいろいろな穴が空けてあります。サーボミミと結合する部分がΦ2.6、その他の5面には、Φ1.5が数個ずつ、そして中央に、ケーブルを通すため(軽量化兼用)の大きな穴が空けてあります。

上の写真は、G-Tuneのモモの付け根ですが、ここに使っている、MICRO-MGと本体を接続しているパーツの汎用バージョンといった感じです。要は、サーボマウントらしきものです。これを使うと、上記の写真のような、直角にパーツを結合することも可能になります。これで、樹脂フレームの泣かせどころである、直交部品の結合や、サーボ回りをコンパクトかつ簡単に組み付けてしまおう!というものです。
反対軸編


上記のようなパーツを作ると、下側にM2用の穴があいており、それで固定することができます。
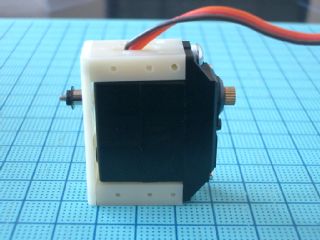
とうわけで、こんな感じで反対軸が作れます。
直交軸編
反対軸パーツを2組と、ちょっとした板部品を作ると…

あこがれの直交軸を作ることができます。ちなみに、反対軸で作ったパーツと、この直交軸パターンで使用している反対軸パーツは、まったく同じモノです。ちと、設計に力を入れまして、こういうのが作りやすように考えています。
ブロック組み編
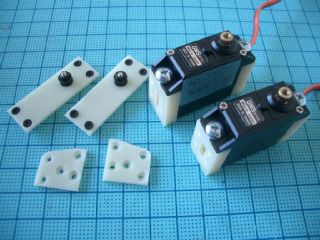
では、最後に、ブロック組み(なんという名前がついているかは良くわかりませんが…)タイプです。

下の写真のような、結合用のプレートを作って、2つのサーボのそれぞれのジョイントパーツを、結合用のプレートにネジ止めします。


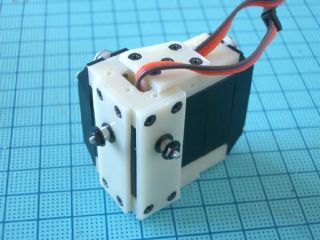
そうすると、ほら!このような足首などに良く使われているパターンの組み合わせも可能になります。でも、直交軸より強度が出ていないので、この場合は、3mm厚(他は2mmです)で結合する方がいいのかもしれません。
また、肘など、板材にそのままサーボを貼り付けるような感じで実装する場合は、これと同じ方法で固定することができます。
まとめ〜
これを使えば、MICRO-MGでのロボット製作が、ぐぐっと楽になると思います。また、アルミと組み合わせてもいいかな〜なんて思いました。ただ、やっぱ、結構、ギリギリなところに穴をあけてもらったので、ネジ締めは、ちゃんとタップを切ってからじゃないと、少々ゆがみがでました。いきなりネジをねじ込んではいけませぬ。
試作につきあってくださっている西さんに感謝感謝!
SISO-LAB
Top
