�����E�Ȃ��Ȃ�����ł��B |
�o�b�N�p�b�N�J�o�[��蒼��
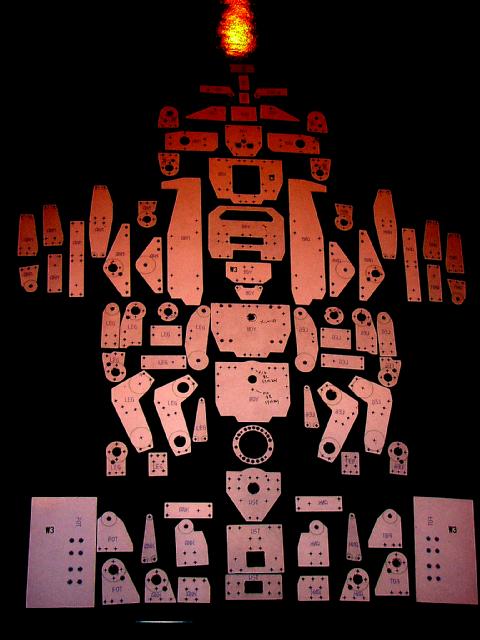
�Ȃ�Ƃ������A������ۂ��Ȃ�܂����B�ŏ��́A�ꖇ���̔ō���Ă�����ł����A
�������܂�Ȃ��̂œ�i�\���Ɂc�B�ʐ^�́A��ԊO���̔��ŏ��̕��ŁA�ŏI�I�ɂ́A
�w���Ƃ̒��ԂɃt���[�����̂��̂�lj����ē�i�\���ɂ��Ă���܂��B
���Ƃ́A����Ő����Œ肵�Ă������Ǝv���܂��B
�܁A�����e�i���X���͂����Ƃ��������̂ŁA�悵�Ƃ��܂�
�i���r�X�{�X�y�[�T�Ŕ��Œ肷��̂́A���t�������\��ρj�B

�o�b�N�p�b�N���\����傫���Ȃ��Ă�����Ƃ����ڂ�
�`���R�[�i�[
�l�`��������APRS-3401�́A���������}600us�Ł}90�x�����܂���B�R�����g�̏�������Y��Ă��܂����̂ŁA�������ɏ����܂����B
�O�_���������BARUMO-SiR���I�i���s�͂܂��c�j |
PRS-3401�A���������B
�u�O�_�����v�cSIPHA CORE�̏ꍇ�A�p�x�ň����̂ŁA�O�x�ʒu��ݒ肷��K�v������܂��B
�z�[���|�W�V�����o���Ɠ����Ӗ����Ǝv���܂��c�悤�₭�����ł��B���̍�Ƃ͂Ƃɂ����C���g���܂��B
����������������Ă����Ȃ��ƁA�T�[�{�ɕςȕ��ׂ��������Ēɂ߂��肷�邱�Ƃ�����܂��̂ŁA�T�d�ɂ���Ă܂��B
MICRO-MG���ƁA���łɏ���m������T�[�{�Ȃ̂ŁA��������Ă����킩��̂ł����APRS-3401�͏��߂ĂȂ̂ŁA�T�d�ɐT�d�ɁB
����ɂ��Ă��APRS-3401���Ă������I�i�f�W�^���T�[�{���������̂�������܂��jMICRO-MG���ƁA����͈͂Ƃ��ɂ��������̂ŁA SIPHA CORE�̕��Ōʒ����ł���悤�ɂ��Ă���̂ł����A���̕K�v�Ȃ��B0.2�x���炢�Ŏw���o���Ă��������邵�B �������A�������������芴�B����͊y�������c�ł��O�_����������������Ȃ��ƏĂ������B �݂�Ȃ͂���Ȃ������T�[�{���g���Ă����̂��`�B����͂����ƁA���A�~�X���Ă��������ׂ���������A �t�j�����Ă���������������܂������A����Ȃ���Ȃ̂��ȁB�Ă��Ȃ��Ă悩�����ł����ǁB
�Ƃ����킯�ŁA�����̗͂ŗ��A�uARUMO-SiR�v�ł��B
�O���猩��Ɣz�����ꂢ�ł����A�w���͂܂��ł��B���ꂩ����\��ł��B


��x�������悤�Ƃ������܂������A�v���̂ق������Ɏ�Ԏ���Ă��܂����̂ŁA������͐����̑����Ƒ������Ƃ����悤�Ǝv���܂��B
�NjL�F�u�����ɂ͕������`�v�Ə����Ă����ĕ������Ȃ��̂����݂����̂ŁA��������������Ă݂܂����B�ǍD�ǍD�B ����́c���̓f�W�J�����������̂ŁA�A�b�v�����ł��B�����܂���B���T�ɂ̓f�W�J�����A���Ă���̂ŁA��������A�b�v���܂��B �ŋ߂̎ʐ^�́A�S���A�g�ѓd�b�̃J�����ŎB���Ă܂��B������������ł��B
�n���_�t������ |
ARUMO-SiR�p SIPHA CORE����
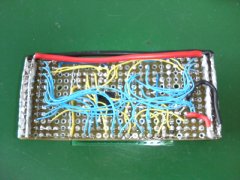
�ӂ��A�悤�₭�����B�Ƃ肠�����A�����`�F�b�N�����ł��B�ǂ����n���_�t�����������Ă�Ɣ���̂ŁA
���J���ǂƂ����Ȃ������Ă���A���\���������Ⴂ�܂����B������Ȃ��Ȃ��R���p�N�g�ɂ܂Ƃ܂�܂����B
�ق�Ƃ͂��ƁA2.54mm�i������j�߂ꂽ��ł����A�C�Â��̂��x�������B����͓d��LED�����܂����B
�����A�_������Ƃ��ꂢ�ł��ˁB�悵�悵�B
CPU�́A���ς�炸��H8/3694�A�T�[�{���䐔�͂Q�P�A�W���C�����͒[�q�Q�A�A�i���O���͒[�q�Q�A
�f�W�^�����͒[�q�P�AProBo���͒[�q�P�A�����ĉ����x�Z���T�A�d���d���Z���T�������ĂƂ���ł��B



���݃v���O���������킹���ݒ��B���c�t�������Ȃ̂ŁA�����A��������y�Ȃ悤��I/O�z�u���l���āA �v���O������������ƕύX���Ă܂��B�����ɂ͕������`�B
�R�������x�Z���TACB302��Ⴍ���t���� |
SIPHA CORE���쒆�c�������傢
�悤�₭�S���̐M�����c�t�����A�c���͓d�����ƂȂ�܂����B�㏭���B
��͏����v���O�������iI/O���t�ύX�j�����čڂ���n�j�c�̂͂��B
�R�������x�Z���TACB302��Ⴍ���t����
����A�����x�Z���T�ɂ́uACB302�v���g���܂��B
���̃Z���T�́A�R���̐ÓI�����x�{���I�����x��d���ŏo�͂��Ă���܂��B
���̂��߁A���t���������c�ł����ł������x�����m���邱�Ƃ��ł��܂��B
�y�������o�͂������Ⴂ�̂ŁA��荞��Ƀv���O�����ŕ����K�v������܂����A
���t����������Ȃ��͔̂��ɂ��肪�����ł��B
���Ă��āA����ACB302�A����܂��Ȃ��Ȃ��w�������A�������A�r�̃s�b�`��2.54mm����Ȃ����߂� 2.54mm�̃��j�o�[�T����ɂ͒��ڎ��t���邱�Ƃ��ł��܂���B�O�ɂ����Ƃ��́A �n�[�t�s�b�`�̊�ɔ��c�t�����A������R�l�N�^�Ŏ��t���Ă����̂ł����A����܂��ꏊ�H�����ŁA H8/3664(3694)�̉��ɓ���悤�Ƃ���ƌ��\�C���g���܂����B �����ŁA�V�������t�����@���v�������̂ŏЉ�܂��B
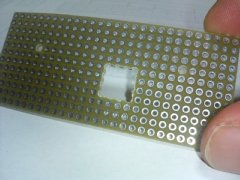
�܂��́A�ǂ�Ȃ��̂����Č��܂��傤�B���ꂪACB302�ł��B9x9x7mm�ƁA���ɏ��^�Ȃ̂ł����A ����Ƀn�[�t�s�b�`������ă}�C�R���̉��Ƀ��C�A�E�g���悤�Ƃ���ƁA���\�A��ςł��B

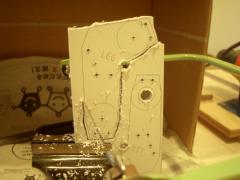
�����ŁA��Ɍ����J���܂��B�c�����S�����A2mm�h�����ōL���Ă����āA �j�b�p�Ńu�`�u�`�Ɛ���A�y�����X���Ő��`���܂����B
�����āAACB302���A���ۂ��Ɠ��̕����獷�����݂܂��B����ACB302�A���K�̕��i�s�������Ă�����j�� ������Ƃ��������悤�ŁA����������ƒʂ邮�炢�̌��ɂ��Ă����ƁA���������ł͂܂�܂��B
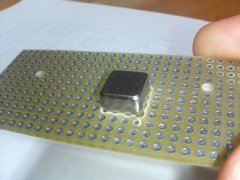

�����āA�s����|���Ď���̃����h�ɔ��c�t�����Ă��܂��܂��B �ڒ��܂ŌŒ肵�悤���ȁ`�Ǝv���܂������A���c�t�������炵������Œ肳��Ă���悤�Ȃ̂ŁA ����ŗǂ��Ƃ��܂����B
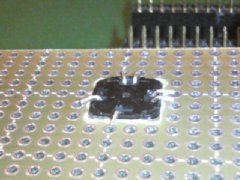
����Ō�́A���ʂɔz�����Ă����n�j�ł��B�܂��d�C��ʂ��ĂȂ��̂ŁA ��肪���邩�ǂ����킩��Ȃ��̂ł����A������肪��������܂��A�b�v���܂��B
�W���C������ |
�W���C������
��`���A���������B�W���C���W���C���B�v���AARUMO-SiR�ɂ́A����KO�̃p�[�c�������Ă����肵�܂����c�B�C�J����A�C�Â��܂����H

SIPHA CORE���쒆
ARUMO-SiR�p��SIPHA CORE������Ă܂��B���`�A���c�t�����B�Ȃ��Ȃ��i�݂܂���B
���j���Ɋ���C�A�E�g���l���āA���ɍ����͐��j���B�悤�₭�S���̐M�����c�t�����A
�c���͓d�����ƂȂ�܂����B�㏭���B
���������A�ǂ������{�b�g�W�̂��Ƃ��l����ƁA���̋C���������������āA�Ȃ��Ȃ��i�݂���낵���Ȃ������ł��B
J-Class�O�́u�ς��ς��v�Ƃ͈Ⴂ�܂��B����́A�ْ��ƃv���b�V���[���痈����̂Ǝv���܂��B
����������́c�����A�悤�₭�킩��܂����B�}�ɐS�ɗ]�T���ł��܂����B���Ԃɗ]�T�������̂͑��ς�炸�ł����ǁB
�����M�ł����c�����A���߂łƂ��������܂��B�����������܂��B�ققفB
RENESAS�̃T���v�� |
RENESAS�̃T���v���\�[�X�R�[�h
���݁A�VSIPHA CORE����̖T��AIIC�A�N�Z�X���[�`��������Ă��܂��B�Ƃ����̂��A�O���SIPHA CORE�ł́A
���ʂ�I/O�|�[�g���g���Ď��̓A�N�Z�X������Ă܂��āiH8/3664��IIC���W���[���o�O�H����̂��߁j�A��ŁA
���x�́AH8/3694�Ƃ������ƂŁAIIC���W���[���������Ǝg���Ă݂悤�ƁB
�����ŁA�������RENESAS�ɃA�b�v����Ă���R�[�h�����Ă����ł����A�Ӂ`��A�Ȃ�قǁB
���A���Ă���̂́A�u�V���A��EEPROM�iI2C EEPROM�j�̃��[�h�E���C�g���p�� (rjj06b0196_apn.pdf)�v���Ă�ł��B
�O��A�N�Z�X�ňُ��ԂɊׂ��Ă��܂����ꍇ�͂�����������̂��`�݂����ȃR�[�h����������ŎQ�l�ɂȂ�܂��B
��H����������A�����͂킩��₷�����ǁA1024kBit��EEPROM�ɃA�N�Z�X���邽�߂ɂ́A�܂��܂����낢�돑���Ȃ��Ƃ����Ȃ������B
����ɂ��Ă��A���̃T���v���\�[�X�R�[�h�̃C���f���g�̂����͐�Ό��Â炢�Ǝv���c
�����炾���ł����H
�������p��̃X�y���Ԉ���Ă��邵�A����ȕϐ��A�N�Z�X���Ă����̂��ȁ`�Ƃ��A���낢��c
ARUMO-SiR�������l�̊��z
��܂Ŋ��������Ƃ������ƂŁA�l�Ɍ��������̈ꌾ���X�g�B
- COOL�ł����������I�i�ӂނӂށA���̂ւ����܂�����`�j
- G-Tune�̂��Z����݂����B�i�Ȃ�قǁB����ϋ��ʓ_������̂��ȁj
- �X�}�[�g�ł�����B�i����`�A���������Ă��炦��ƁAPRS-3401����т܂��ˁ`�j
- �o���L���[�݂����B�i���ꂵ���ˁ`�B�ł��A�ό`���Ȃ��́B���߂�ˁj
- �Ђ��Ђ�낵�Ďセ���B�i�������B�����ł��s���Ȃ��猾��Ȃ��ł�`�j
- ���ꂿ���ƕ����́H�i�ǂ��ǂ��B���Ђ��Ђ��Ёj
���݂���
�e�o�����̂Ƃ���ŁA
�̂ނނ����Ƃ����������ꂽ�A
AMATERAS�iROBO-ONE 8th�ɂ��G���g������Ă��܂��j�̓��悪�f�ڂ���Ă��܂��B
�L���[�e�B�[�o�j�[�����[���R�Ŋς����A�u����`�A���킢���A����Ă݂����`�v�Ǝv�����̂ł����A �܂��A�����悤�ȏՌ������̒��𑖂��Ă��܂��B���������A���������̂͐v���������A�䖝�䖝�ł���B ����A�ł����t�X�P�b�`���炢�c�_���_���B ���R�ł́u�_�y��v���u���P�����v���U���Ă������邱�ƂɊ��҂��Ă��܂��B�������A�Ȃ��ɖډB���H�H�H
ARUMO-SiR�̊�炵������ |
��������
��������ƁA�v�~�X���i�Ƃ�����蒼���Ă�����ł����A���������������܂����B
���ɂ����낢��Ƃ���Ă����������������ȁ`�Ƃ����Ƃ���������ł����A�������Ă���Č������邱�Ƃɂ��܂����B
�u�l�^�v�Ƃ������ƂŁA�u��炵�����́v�����Ă݂܂����BABS�����傢���傢�Ƃ������������̊��ɂ́A
���������ɂł�����Ȃ����ȁ`�Ȃ�Ďv���܂��B
����̃|�C���g�́APRS-3401���Œ肷��̂ɁAM2�r�X���g���Ă��邱�Ƃł��B���ʁA�T�[�{�̃~�~�Œ�Ƃ����ƁA M3�ŌŒ肷�邱�Ƃ������̂ł����AM2�p�̃�4mm�X�y�[�T�ƁA��5.5mm���b�V�����g���ČŒ肵�Ă��܂��B ���̃T�[�{�̃~�~�̌`��A�T�[�{���[�J����ɂ͂��Ќ������ė~�����ȁ`�B

�Ƃ����킯�ŁA���݁ASIPHA CORE�쐬���ł��B
���{�R���}�K�W����ROBO-ONE�����K�C�h |
�����A�ꏏ�ɔ����Ƒ����^�_
������Amazon.co.jp�ł悤�₭�����܂����i250�~���̃M�t�g�����������j�B�����AG-Tune�̕ό`�ʐ^���ڂ��Ă�`�B����ς肱�̍���G-Tune�̕����܂Ƃ܂肪�����Ă����ȁ`�B
��ŁA���A�������C�ɂȂ��Ă���̂��A�u�L���[�e�B�[�o�j�[�v�̓����ʐ^�B�Ӂ`�ށA�Ȃ�قǁA�����Ȃ��Ă����̂��`�B �r�\���ɂ�����Ƃт�����B�����������������Ă������B���肢������A�ق���̂������Ă��炦�邩�ȁc�B
���������ƕ����Ɓc |
�����T���N�A���߂łƂ��������܂��B
���{�b�g�������I�[�v���T���N�Ƃ̂��ƂŁA���߂łƂ��������܂��B
��ŁA�`���ɍs���ƂȂɂ��u�T���N�L�O��������Z�[���v������Ă��邼�B�v�킸�A�v�`���Ɖ����Ă��܂��܂����B
�Ƃ����킯�ŁA�Ƃɂ���PG-03�A�Q�A���܂蕨�ɂȂ��Ă��܂��܂����Ƃ��B����p�̕��A���[�����������B���z���炢�Łc���O���O�c���ߐ�܂����i2005/08/20�NjL�j�B
0044 |
ROBO-ONE�G���g�����܂����B
�G���g���[���́u0044�v�ł��B�����A�Ȃu�ӂ��[���[�ӂ��[�܂��Ȃނ��v���Ċ����ŋ������ł��B
J-Class����u�S�v�������Ă܂��B����̓_�u���ł��B����������̉��Ȃ�ł��傤���B�����J-Class�Ɉ��������A
�G���g���[���\��܂��̂ŁA��낵�����肢�������܂��B���x�͔w���Ƙr���ȁB���Ɩ��D������Ă������B
�l�W�̒��߂����Ń}���ł��܂����B
�Ƃ����킯�ŁA���}�Łc�S�̃X�P�W���[���ł����A����������Ȃ���ł����A
�w��͕��i���`�̎��̐U���i�d�C�h�������T���_�[��Ԃɂ��Ďg���Ă���̂Łj�ł҂�҂肵�Ă��邵�A
�E��ɂ̓l�W�̒��߂����ő傫�ȃ}�����R���ł��Ă��܂��܂����B
���������Ή��H���ɂт����肵���̂��A�����Ȃ�J���I�����͕����̒��Ȃ̂ɂǂ����āH�Ǝv������A
�E��̃}�����Ԃ�Đ�����яo�����̂ł����B����`�A�����ʓd���Ă��鎞����Ȃ��Ă悩�����ł��B
�}�������яo�������ʼn�������A�����ʂɃn�`���Ċ����ł���ˁB
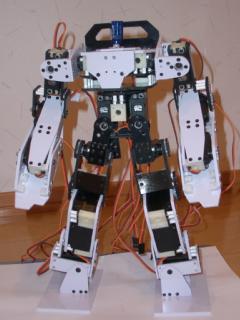
�Ȃ�Ƃ��`�͂ł��܂������A�������͏��Ȃ��Ƃ͂����A�v�~�X���A���������_������܂��B ���̖ڕW�́A�T���܂łɁA���J�C���Ɛ���{�[�h��������Ƃ���܂łɂ��悤�Ǝv���܂��B ���ƁA�T�[�{�z�[���A�������̂Ƃ���͕W���̂��́A�Ў����̂Ƃ���̓X�[�p�[�T�[�{�z�[�����g���Ă��܂����A �����g�ݏグ�Ă݂�ƁA�u���`��A�W���̂ق��A���v���ȁ`�v�Ȃ�ĕs���ɂȂ�����B �W���̕����A����Ϗ������g�߂�̂ł����g���Ă��܂��܂������A ����ς蕱�����ĐM������̃A���~�z�[���Ƃ��g�����ق����悩�������ȁ`�B �܁A�Ȃɂ͂Ƃ�����A�������Ă݂Ȃ��Ƃ킩��Ȃ��Ƃ������ƂŁA���̂�����̑ϋv���`�F�b�N�͗��T������ĂƂ���ł��B �����A�_����������c��蒼�����Ԃ͖����̂ŁA�ʂ̎���l���܂��i�ォ��t�^�����ĕ⋭����Ƃ��j�B
����ɂ��Ă��A�����g�ݏグ�Ă݂�ƁA�v���Ă����傫���ȁ`�B�܁A�Ȃ�Ƃ��Ȃ�ł��傤�B ���Ȃ݂ɏd���́A�t���Ɏ��������ꍇ�ŁA1.2kg���炢�ɂȂ肻���ł��B���͌��\�y���ł��B���ƁA���Ȃ݂ɐg����32cm�ł��B
�l�W�����o�J�ɂȂ�d�g��
��{�I�ɁAABS�ɒ��ڃl�W����Ă����ł����A�Ȃ�ƂȂ��A�Ȃ�Ńo�J�ɂȂ邩�킩���Ă��܂����B
�������A���x�����O�����肵�Ă������o�J�ɂȂ��ł����A����Ă���Œ��ɂȂ邱�Ƃ�����܂��B
�ǂ����A��C�ɂ��������˂����ނƁA���C�ʼn��x���������Ƃ������āu�{�R�v���Ƃ������Ⴄ�݂����ł��B
�r���ŋC�����āi�����Ƒ����C�Â�����Ċ����ł����j�A������肵�߂�悤�ɂ����炢�������ɂȂ��Ă��܂����B
����Ȃ킯�ŁA���������ł��ꍇ�A���܂艷�x���オ��Ȃ��悤�ɋC�����Ȃ�����Ƃ����ł���B
�q���[�}�m�C�h�^��g�ݏグ�Ă킩��������
G-Tune�Ɣ�r���Ăł����A�������傫�������܂��B�����Ɠ������邩�ǂ����A�����тт��Ă܂��B
�������Ȃ���A�X�y�[�X�������A�Z���T���ڂƂ����₷�������ȁ`���Ďv���Ă��܂��B
�v�ɂ��܂莞�Ԃ������Ȃ��������Ƃ������ł����A�ق�Ƃ͂����Ə������̂���肽��������ł��B
�ł��A�ǂ������i�����܂�܂���ł����B
�g�݂����������ƂŁA���l�`����V�т̂��Ƃ��O�j�O�j�Ɠ������Ă���̂ł����A �v���Ă����A�N�V�������ł��Ȃ������Ȃ��Ƃ����o������A �t�Ɏv���Ă��Ȃ������������ł������Ȃ�Ă̂���������ł��B �܂��A�ȂA�������X�}�[�g�ŁA�����Ō����̂��Ȃ�ł����������傢���̂Łi�e�o�J�H�j�A ���܂�ςȃ|�[�Y�͎�点�����Ȃ��ȁ`�Ȃ�Ďv���n�߂Ă܂��āA����R�}���h�̌n���l���������ł��B
�R���Z�v�g�Ȃ�ł����AJ-Class 5th��G-Tune�̓��������Ă������������ɂ́A �ꔭ�Łu���ASISO�����v�Ǝv����悤�ȓ�����ڎw���Ă��܂��B���x�̓_�C�i�~�b�N�Ȋi�������f���Ƃ���낤���ȁ`�B �Ȃ�Ƃ����Ă��q���[�}�m�C�h�^�ł�����AG-Tune�ƈ���āu�i�������ł��I�v�ƌ������Ƃ��ɐ����͂�����̂ł͂Ȃ����Ǝv���܂��B �܂��A�o�����X�����낢�����Ă���̂ŁA�V��������������A�ǂ�ǂ�o�Ă���̂ł͂Ȃ����ƁA �������y���݂ł��B����A��J�������ς��o�Ă������ł����ǁB�͂͂́B�����ē����������ɁA �܂����̘H�����l����ƁB�y���݊y���݁B���������������`�B
���g�݊��� |
�����`
�ߑO���͎G�p�Ƃ��łقƂ�ǐG�ꂸ�B�ߌォ���ƊJ�n�B�����A�Ȃ�Ƃ����g�݊����c���āA�قƂ�ǒ��ɂȂ��Ă��܂��܂����i�P�V���j�B
����H����Ȃɑ傫�����������H�H�H�Ƃ肠�����A����ŃG���g���[�V�[�g�������B
���i��o������ |
��o���֗��O�b�Y
�Ƃ����킯�ŁA���j���͒�v�w�ƃo�[�x�L���[�Ńh���`�����������I������Ƃ���ŁA��ƍĊJ�B�������͊������Ă����̂ŁA�Ђ�����p�[�c�̐藣���Ɛ��`��ƁB
�ȑO�A�����q����u���m�R�ׂ̍��̂�������`�v�Ƃ��������Q�b�g���Ă����̂ŁA����炵�����̂��w�����Ă݂܂����B
����A�ǂ����̕����ւ����Ƃ����S���ʃJ�����Ȃ�ʑS���ʃm�R�B����āA�v��ʕ����֍s�����Ƃ������B
������Ɗ����Ύʐ^�̂悤�ɃO�j���O�j���ɐ邱�Ƃ��\�ł��B�`�a�r���ƁA���育���܂��B

�����ƃz�r�[�p�b�m�b��葬���c
�Ƃ����킯�ŁA����ň�C�ɐ��`���Ă��܂��܂����B�����ƁA���x�Ǝd�グ�̗ǂ��������A�z�r�[�p�b�m�b��葬����Ƃ������̂ł͂Ȃ����Ǝv���܂��B
���������Ȃ̂ŁA�P��̕��i���L���Ă̎B�e�B�������c�B�o�b�N�p�b�N�J�o�[�������āA�S���̂`�a�r���i�ł��B
���~�x�� |
�i���Ȃ�
���`�A�����ł��ˁ`�A�݂Ȃ���A���������������ł��傤���H�����́A8/11���炨�~�x�݃X�^�[�g�ł����B�Ƃ����킯�ŁA�{���܂ł�TOPIC�ȂB
- 8/11�i�j
���m�����֍s���B�P�S���l�������炵���B�}���[�V�A�̂Ƃ���́u���e�B�[�`���i�C�v�i���������j ������Ă���Ƃ��낪�������y�������ŁA�H�ׂĂ݂���A�Ȃ��Ȃ��������������B�W�O�O�~�B �V���K�|�[���̃V���[���ʔ��������B����ρA�X�e�[�W�͂����łȂ�������B����Ă�����y�������B��͓��{�ق��ς����炢�ł��B ���Ƃ̂�т�y����ł܂����B���낢�날���Ă������낢�Ƃ���ł����B - 8/12�i���j
���d���̏h����������炨������B���̌�A�F�l�����҂��Ĕӌ�т��ꏏ�ɁB��͗F�l�̎q�������ƗV�ԁB��́A���Z�̗F�l�����Ƃ��ׂ�B - 8/13�i�y�j
�ߑO���͂��炾��ƁB�ߌォ���Ђ̏h�����낤�Ǝv������A��Зp�m�[�g�o�b���N�����Ȃ��Ȃ�B ���傤���Ȃ��̂ŁA�h��͒��ԂɃw���v�B�f�[�^�͂܂�����������ЃT�[�o�ɂ��邵�A �Ȃ����x�ݖ����ɂo�b����ւ��X�P�W���[�����������肷��̂ŁA�܂��ǂ��Ƃ���B ������߂āH�{�i�I�Ɍ������J�n�B�P�A���������Ƃ��邪�A���̂Ƃ�������B �����������n�߂āA�u�����A��������������Ƃ悩�����v�ƋC�Â����A�܂��A���f�Ƃ���B
���ς�炸�������c |
�������A�������A�������c
�c�ƁA�������������Ă���Ƃ܂�Ȃ��̂ŁA������ƃl�b�g�p�j�B�����AJ-Class��SP�̋L�����B
���o�a�o������
���{�b�g�t�@�����R����3���� 2�����s���{�b�g�i�����uROBO-ONE�v�`����1�`
���{�b�g�t�@�����R����3���� 2�����s���{�b�g�i�����uROBO-ONE�v�`����2�`
ONO�������Ɍ������`�Ǝv������A�����f�ڂ���Ă��܂����c�������B
�ł��A���������Ȃ̂Ō������ɂ��Č���Ă݂��肷��B�������́A�܂��̓I�v�e�B�J���Z���^�[�|���`�ŁA�ڕW���Z���^�[����āA �n���}�[�ŃR�c���B���̌�A�Z���^�[�h�����ŗ\�������H�B�����āA�K�v�ȃT�C�Y�̃h�����Ō������B �傫�ڂ̃h�����n���g���ꍇ�́A�i�K�I�ɑ傫�����������܂��BABS���H�ɁA�����܂ŕK�v���H�Ƃ����C�����܂����A ��������Ă���ƁA���ƃ{�[���Ƃ��Ă��Ă������Ƃ����Ƃ���Ɍ����������̂ŁA������������Ă��܂��B ����ɁA�ł��������̓��[�}�ʼn��H�B�����Ƃł��������́A�z�[���\�[���������ŁA �Ȃ������ʂ��āA�d�C�h�����ɉ�]���X�������Đ��`�B ���Ԃ��ł�����A��������ĉ��H���Ă����ł���`���Ă����̂��A�b�v�������ȁ`�B
�ڕW���Z���^�[�ɓ���āc |
������
�u�ڕW���Z���^�[�ɓ���Č������c�B�v
�u�ڕW���Z���^�[�ɓ���Č������c�B�v
�u�ڕW���Z���^�[�ɓ���Č������c�B�v
�u�c�v
�Ƃ����킯�ŁA�uARUMO-SiR�v����̒x������߂��ׂ�
�u�ڕW���Z���^�[�ɓ���Č������c�B�v
�u�ڕW���Z���^�[�ɓ���Č������c�B�v
�u�ڕW���Z���^�[�ɓ���Č������c�B�v
�u�c�v
���e��
J-Class��̍��e����������y���������ł��B�����̓p�[�e�B���݂����Ȋ����������Ǝv���̂ł����A
����͍��~�ł����B�܂��A�����͗\�I���ł���������͌������Ƃ������ƂŁA�����b�N�X�ł��܂����B
���~�Ƃ������ƂŁA���������Řb�ɂ������ȁ`�Ǝv���܂������A�����A�����ň���ł�����F�B���I���Ă��ƂŁA
���낤�낵�āA���낢��ȕ��Ƃ��b���邱�Ƃ��ł��܂����B�Ō�A�l�l�̐Ȃ̃f�U�[�g��H�ׂĂ����悤�ȋC�����܂��B
��A����ׂ�܂����ĂāA�H�ב��˂��������������悤�ȋC�����܂��B
�t�@�~���[�`�[���̂��q����₨������̔w���ɗ����������Ă��܂��܂����B
�Ƃɂ����y���������ł��B������Ɠ����ɂ����̂���_�ł����A������������̐e�r����悩�����ł��B
���������A�悭���������Ă��������Ă�����͂����m���Ǝv���܂����A�ӊO�ƒm���Ă��Ȃ��悤�ł��̂ʼn��߂ď������Ă��������܂��B G-Tune�́A
����H
�ō���Ă��܂��B���A���x�������ꂽ�̂ł����A�T�[�{�W���C���g�p�[�c�ȊO�͂��ׂĎ���H�ŁA �n���ɁiCNC���h��Ƃ������Ƃ��Ȃ����ǁj������}�V�[���ł��B �o�J�b�^�[�ƃ��X���A�z�[���Z���^�[�Ŕ������d���h�����{�O���C���_�[�f�B�X�N�ō���Ă��܂��B �u�ց`�A�������`�v�Ƃ�������ƁA�ƂĂ����ꂵ���ł��B�ł��A�R��������ꂮ�炢�̉��H�͂ł���悤�ɂȂ�܂��̂ŁA ���ЂƂ����������������B
J-Class�E�݂Ȃ���A�ǂ������肪�Ƃ��������܂����B |
�������܂����I
J-Class 5th�A�I���܂����`�B����`�A�������܂����B�������āA���ɂ��Ă݂Ȃ���̃��{�b�g���������Ă�����������A
�G���g���[�i���o�[��\���Ă��������Ă�����̑������ƁI�ق�ƁA�т�����̊����ł��B�ق�Ƃ��ɂ��肪�Ƃ��������܂��B
���̏����āA��������킳���Ă��������܂��B�Ȃu�R���y�e�B�V�����v���Ċ��������āA�������悩�����ł��B
�ق�Ƃ��ɂ��肪�Ƃ��������܂����B
���ʂ͏��D��

���`���ƁA���ʂ̕��ł����A�\�I�͂V�ʂŁA�g�[�i�����g�͂Ȃ��ł������̏��D���I�ł��B
�Ȃ�ƍ���A�����u�����������̂ł����A�݂Ȃ���̔���̂������ŁA Shining-G�Ɠ��_�ɂȂ�A���̌�A�Ȃ�ƃo�g���I
���ʁAShining-G�̃o�b�e����ŏ����Ă��܂��܂����c�i���̓t���p���[�ł��荇�킹�肢�܂��ˁI�j�B
����ɂ��Ă�ProBo�A���쐫�悩�����ł��ˁ`�B�M�������o�c�O���B�J�����Ă���������SANWA����Ɋ��ӂł��B
�قƂ�ǃI�y���[�V�����~�X�����i����āA�����Z�R�}���h���������̂̓q�~�c�j�B�A�i���O���삪�ł��Ȃ��̂ŁA
���̐惍�{�b�g�̕����ǂ�ǂ�i��������܂��ς���Ă����ł��傤���A���̂Ƃ���A�x�X�g�}�b�`�Ȋ����ł��B
���ɐS�Ɏc���������́ADynamizer Jr�Ƃ̐킢�ł��B����͂������납�����B
�ق�Ƃ��ɂ݂Ȃ���A���肪�Ƃ��������܂����B�����āA����Ȃǂ����悤���Ȃ��v���x���Ă����ȂɊ��ӂł��B
J-Class�̍���ɂ��Ċ肤����
�����J-Class�A�\�I���炵�āu���N�O�̑��͂Ȃ����́H�v��ԂŁA�����܂������x���A�b�v�������܂����B
�����A�т�����ł��B�O��A�S�S��G���g���[���Ĕ������炢���������郍�{�b�g�����������悤�ȋC��������ł����A
����́A���~�����`�I�Ȋ����ł����B
���̏I���ɁA�uJ-Class�Ƃ͕ʂ̏��S�҃N���X�������������v�Ƃ̘b������܂������A���ЂƂ����肢�������ł��B �y�ʋ����āAROBO-ONE�{��Ƃ͂܂��Ⴄ�ʔ����Ǝ�y���i���K�I�ɂ��j������Ǝv���܂��B ���Ƃ����āA����ς�S�̂̃��x���A�b�v���������AROBO-ONE�{��Ɠ��l�ɕ~�����������Ă���̂��ȁA�ƁB �����ŁA�قړ������[���Łu���S�҃N���X�v�ƁuJ-Class�v��������āA �u���S�҃N���X�v�ŗD��������u���S�҃N���X�v�ɂ͏o��Ȃ����̃��[���ʼn^�p������ǂ����ȁ`���Ďv���܂��B
�S���p�N�p�N�iPAKUPAKU�j |
�����A���悢��{��
�����A�S�����p�N�p�N�ŁA�_�f�s���̂������ȏ�Ԃł��B���ĂƁA�i���ł����A�f���͑S���Ђ����Ď��Ԓ����������܂����B
������Ɨ]�T����1:50�ɂ��܂����B�ꕔ�A����Ȃ����삪����̂ŁA������Ē������B�f�����e���������B
����v���O�����̉��ǂ������B���������ł��B����͂��ۂ�������o�b�`���i�ł��A�\�I�ʉ߂��Ȃ��ƈӖ��������ł����j�B
�i���n�́A�܂��c�肪����̂ł����A�\�I�ʉ߂ł�����z�e���ō�邱�Ƃɂ��܂��B
����ł́A��������������ړ��J�n���܂����A�݂Ȃ��܂��A���S�A���N�ɂ͂��ꂮ����C�����āA���ł�����܂��傤�I
J-Class �f�� |
�����A���������{��
�����AJ-Class�܂ł��Ƃ킸���c�����͂��������őS���̃f�����삪�������āA���ꂩ��S���Ђ����ăe�X�g��������ȁ`���ĂƂ���ł��B
�Ȃ�ƂȂ��A�������ԃI�[�o�[�ȋC������̂ŁA����ɒ����K�v�����ł��B����n�v���O�������P�̕����Ȃ�Ƃ����h�������Ă��������B
�ň��A�v���O�����̕��͋��j���̖�ɂ�낤�B�͂͂́B
���͍������c
���̒��ɉ������Ă����ł��B������N�ԁA������l���Ă��A�������`���Ƃ����Ƃ��납��`�ɂȂ�Ȃ��������̂������Ă��Ă��܂��B
���`�A�Ȃ�ł��̖Z�����Ƃ��Ɂ`���Ċ����ŁA�}���Ń��t�X�P�b�`�`���Ă܂��B����G-Tune�̌`���ł܂����Ƃ�������Ȋ����ł����B
���̒��ŁA���邮�����ł��B�f�U�C���A�@�\�A���\���̃J�e�S���łȂ����Ă���ւ̃R�[�X���A
���邮����Ɖ���Ă����Ă�����ł��B�u����ȃf�U�C���ǂ��ł����`�v�ƃf�U�C���̕������o���v�}���A�@�\�̕����ɍs���ƁA
�u���߂���A�����̉��͈͂͂������B�v�A��ŁA���\�̕����ɍs���Ɓu���ꂪ�o���Ȃ��ƃ_���B�ǂ�������肾�ˁH�v�B
�܂��蒼�����āA���̕����ցB��������ĉ������������Ɂu�_���A��蒼���v���Č�����Ƃ��ƁA�u��̊K�ɂ������Ă�����`�v
���Ă����Ƃ��������āc�ȂA������獡���ɂ����āA�ǂ�ǂ�K�i�������Ă����ăN���A�ɂȂ��Ă��Ă܂��B
�Ō�A�����Ȃ��������ł����A�V��G-Tune���`�ɂȂ邩���c�B
�����A��A����ł����H�܁A�ł�����̂͑����ĂX���ȍ~�ł��B���̂����ɖY��Ȃ��悤�ɂ����������Ă������B
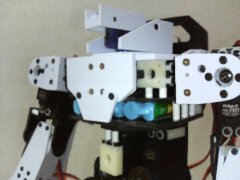
MICRO-MG�T�[�{�z�[�����H |
�����e�A�����e��
���ĂƁA������G-Tune�̃T�[�{�z�[�����Ƃ������܂��B
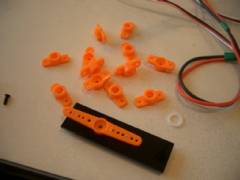
MICRO-MG�̃T�[�{�z�[���́A���̂܂g���ĂȂ��āA���X�Ă��錊��������ɓ����Ɍ����A�Z�����Ďg���Ă��܂��B
��ꏊ�́A���X�̈�ԓ����̌��B����ȏ�����ɂ���ƁA���x�̓t���[����ABS�̕��������Ȃ��Ȃ��Ă���i�Ǝv���j�̂ŁA
���̂�����őË����Ă��܂��B�M�����̖ʂł́A����ς胁�^���z�[�����Ǝv���̂ł����A���̂Ƃ���A�}���Ɏ��ւ��邱�ƂœY�t�i���g���Ă܂��B
�ʐ^�Ɏʂ��Ă��鍕���́A�K�C�h�p�̔ŁA����ɃT�[�{�z�[�����Œ肵�āA���ꂩ�猊���������Ă��܂��B
�Ō�Ƀj�b�p�ƃ��X���Ő��`���Ăł�������ł��B

ARUMO-SiR�̖��O���ł���Ɍ�������
�ł���ɁuARUMO-SiR�v�����X�P�b�`�Ɩ��O����������u����������[�v���ēǂނ́H�ƕ�����܂����B
�Ȃ�ƂȂ������Ȋ��������ǁA�����͂������傢���C������B���x����A���O�Ɉӌ������Ƃɂ��悤�B
���݁A�|���`�ł�15%����i��ł��܂���B�f���܂ł������������A�܂��Ƃ������낤���āc
����ȂɃR�R���ɗ]�T������܂��`��B
�����{�Ԃ��߂Â��ƁAROBO-ONE�̕��������邾���ŐS�����p�N�p�N���܂��B�uBAKUBAKU�v����Ȃ��āuPAKUPAKU�v�ł��B ����������́A���߂ďo�ꂵ���Ƃ�����ς��Ȃ��ł��ˁ`�B
���A���킢��
�O���e�����̂Ƃ���ƁA�C�J���X�����̂Ƃ���ŁA
���킢�����{�b�g�A�uRoppo�v�����B���`�ށA�����ł��ˁ`�B����Ă݂����ł��B
���̍\�����̂͂R�N�قǑO�A��Z�̐搶������Ă����̂œ��ɖڐV���������͂��Ȃ�������ł����A
�u�����v���ō��I�ł��B
���̌��Ă��邾���ʼn��y������Ă������ȓ����A�����A���炵���ł��B�ł����Ȃ� ASURADA�����̂U���x�[�X���ȁB�r�Q�������ƁuHappo�v�ȁ`��āc�S�R�A�u���{�b�g�v�ɂ������ĂȂ��c�B
�v�����Q�G���i�v�����G���~�Q�j |
����Ă݂܂����B
���`���ƁA����̂��ƂȂ�ł����c���ǂ����A���܂����B
�Q����800cc�ł�������Ă݂܂����i���ʃT�C�Y�łW���j�B�Ȃ��Ȃ���߂Ȃ������̂Ő�@�ŃN�[���_�E�����܂����B
���e�ƂS�l�Ŋ��H�ł��B���������܂��V���b�v�����ɗ����܂���ł����B���O�ɕ��ʃT�C�Y�ō���Ă݂��̂ł����A
���̎��͂��܂��V���b�v�����܂ŗ����܂����̂ŁA�T�C�Y��e��`��ɊW���Ă��邩������܂���B
�C���������猤���𑱂��܂��B

Dynamixel AX-12�����[�X
Best Technology����A���悢��AAX-12�����[�X�B
�����ȁ`�A���͈͂�300�x���`�A�����ȁ`�B300�x��������A�ό`�ɂ�����ȁ`�B�uEndless turn�v���ĂȂ�ł��傤�H�H�H
�g���N�͌��\�Ȃ���ł������x�͒x���ł��B����ł�����݂�ƁA�������������Ă܂��B
�l�I�ɂ̓g���N�����Ă���������A�I�v�V�����Ńn�C�X�s�[�h�M�A�Ƃ����������炢���ȁ`�i10kg-cm���炢��0.15sec/60deg���炢�j�Ƃ��A
\10,000���炢�Łu�n�C�O���[�h�^�C�v�E�g���N�������炢�A�{���ȏ�œ���v�Ƃ��B
������������A�q�U�Ƃ����̃��[���Ɏg�������ł��B���A�_�u���T�[�{�ő��x�҂��Ƃ����������܂��ˁB
�d����55g�A�l�i��\4500��B�Ȃ��Ȃ����͓I�ł��B
G-Tune�i��
�T���͒f���Q�ӏ��ƒZ���ɔY�܂��ꂽ���̂́A�I���X�P�W���[���B���������Ȃ̂ŁA�S�̓I�Ƀ`�F�b�N���Ă݂܂������A
���͑��v�����ł��i�������Ƃ���͎�Ŕz�����y���������Ƃ��������킩��j�B��́A�T�[�{�z�[���ƁA
��⓮���̉������T�[�{���R�قnj���������J�̕��͂n�j�Ȋ����ł��B�\�t�g�̕��ł����A
����n�̃v���O���������ǂ��Ă�����A������Ɩ�肪�c�B�����ȃ^�C�~���O�Ȃ�ł����ǂˁ`�B
�R�}���h����ꎮ���ۂ��Ȃ�悤�ɉ��ǂ��Ă����ł����A�{�^���������Ă��鎞�Ԃ��Z���ƁA�v���O������A
�I�������ςȂ��ɂȂ�������āA�ʂ̑�������Ȃ��ƃL�����Z���ł��Ȃ��Ȃ����Ⴄ��ł��B���āA����͂ǂ����悤���ȁB
�����������艟���悤�ɂ���Ζ�薳����ł����A���������蔲�������������ŋ�J�����̂�J-Class 3rd�i�P�N�O�ł��j�B
�����͂�������ĂȂ�Ƃ����܂��B