���{�b�g�o�g���c�u�c |
�S�l�v���W�F�N�g���v���[���g�I
�S�l�v���W�F�N�g���ו����͂��܂����B�Ȃ낤�`�Ǝv���ĕ����J����Ƃc�u�c���I
���{�b�g�o�g�� in ���É����[�^�[�V���[�̂c�u�c�ł��B�S�l�v���W�F�N�g����A�ǂ������肪�Ƃ��������܂��`�B
�����A�ςĂ��܂��B���`�ށA��������Ă����̂��`�B������LLP����A���肤�܂��ł��BSISO�̉���C�}�C�`�c�B
����͂����Ƃ���낤�i���āA�����������̂��H�j�B

���{�t�@�C�g�Q |
�s���Ă��܂����A���{�t�@�C�g�Q
���{�t�@�C�g�Q�A���ʂ́c����s�ށA�s�ҕ�������s�ނŁA�ƂĂ��K�b�N�V�Ȍ��ʂɂȂ��Ă��܂��܂����B
�݂Ȃ���A�悭��������Ă���A���炵���ł��B
����Ȃ킯�ŁA��͂Q�w�Q�ƃo�g���J�I�X�ŃK�V�K�V�Ɗy����ł��܂����B�u�����Ă�����y���߂�v�悤��
�z������Ă���ȁ`�Ƃ��������ŁB���ɂ́A���{�b�g�����A���E���h�K�[���ɐ_�ЁA���낢�됷�肾������ł����B
�C�ɂȂ錋�ʂ̂ق��ł����ASRC�́AGUARDIAN��mabotan����AORC�́A�U���̒���d�@����ł����B ���߂łƂ��������܂��Imabotan����̐_�����������c�̂��܂��ɂ͋����܂����B ��ۂɎc�����t�@�C�g�́cORC��Black Seed��Yogo�ł����B�����ŊςĂ��Ċy���������ł� �i�ł��A���̒���ARUMO-SiR����荞�݂����Ƃ͎v���܂���ł������c�j�B
LLP����ŁA���ɓ��悪�A�b�v����Ă��܂��ˁI���`�ށA���₢�A�b�v�Ɋ��ӂ����������B
- �I�[�v�j���O�Ƃ�
���{�b�g����ׂāAAMATERAS�ɂ����S�F��H�������A���{�t�@�C�g�Ȃ�ł͂̉��o�ł����B �܂��A�����O���Α��ɂ́AAMATERAS�_�ЂɁA���ʂ��ʎB�e�R�[�i�[�ƁA�Ȃ��₩�ȕ��͋C�I


- SRC�����
���������|���n���h������EGARIM�ɕ����܂����BARUMO-SiR�̓������悭��������Ă��܂��B �܂����߂ĂR�������炢�������ł����A�����Ƃ��˂��Ă��܂��B�����O�T�C�Y��A ������Ɠ����ɂ������Ƃ���������ł����A��������ƕ����܂����B���������A���{�t�@�C�g������ �������l���Ȃ��Ƃ����Ȃ��ȁ`�B
���ɂ��n�߂Đ������̕��Ńg�[�i�����g���オ���Ă��������������������Ǝv���܂����A ����A�悭�������ă��{�b�g���d�グ�A�����Ȃ�r���S�ȕ��X�������Ă���Ǝv���܂��̂ŁA ���������C���������߂Ă����Ȃ��Ƃł��B - �s�ҕ�����
����́A���̂̃��{�b�g�Ő킢���s���A�����O�A�E�g�����畉���A�^�C���A�b�v���ɕ�����c�����ꍇ�́A �J�n�n�_�̑Ίp��̈�p�Ɉ�ԋ߂��l�������Ƃ������̂ł��B����͂������낢�ȁ`�B
���_�A�A�O���b�V�u�ɍs���܂����B���A�������A�Ō�30�b�AARUMO-SiR���Ӑ}���ʓ����ɂȂ��āA �^�C���A�b�v�B���M��\�����܂������A���̂܂ܔ���ɂȂ��Ă��܂��s�ނ��Ă��܂��܂����B �^�c�����^�C�g�X�P�W���[���ł���Ă��đ�ς������Ǝv���܂��̂ŁA����A�����悤�Ȃ��Ƃ��N������A �P�ɏ�`���邾���ł͂Ȃ��A������ǂ��������邩���܂߂Ă��̏�Œ�Ă���悤�ɂ��悤�Ǝv���܂��B ����̏ꍇ��������A�������m�F���Ă���P�������Ȃǂ��Ă���Ηǂ������̂ł͂Ȃ����ȁ`�ƁB �݂�Ȃł��ǂ��C�x���g��ڎw�����̃R�R���ł��B - �Q���Q
�Q�̂őg��ŁA�S�̂Ő키�Ƃ������Z�ŁA���v�R�_�E���ɂȂ����畉���ł��B
����[�Ƃ���Ƒg�݂܂����B�P���ڂ́A����@�g���u���̂��߁A�Q���P�ɂȂ�܂����B �Q�̂ŃK�X�K�X�����̂��Ȃȁ`�Ƃ������ƂŁA��サ�Ȃ���킢�A���ڂ͏����܂����B
�Q��ڂ̓y���g��KHR-1�B����KHR-1�A��Ŏʐ^���B�点�Ă��炦�悩�����ȁ`�Ǝv�����̂ł����A ���Ƀ��[�����������Ă���A�������T�[�{�������t���[���ɑg�ݍ���ł���܂����B���H�����ꂢ�ŁA ���������Ɏd�オ���Ă��܂����B�����̃`�[���́A�c�O�A�����Ŕs�ނ��܂����B
�Q���Q�A�������ƁA�������������낻���ł��B�Ⴆ�A����A��������ORC�@��SRC�@�Ńy�A��g��ł����Ǝv���̂ł����A �S�̂̒��ŁA�uSRC�~SRC�AORC�~ORC�v�Ƃ��邩�uSRC�~ORC�AORC�~SRC�v�Ƃ��邩�ŁA�W�J���܂������Ⴂ�܂��B �Ⴆ�ASRC�@�̋r��������ASRC�@������ORC�@��|�M���Ă���ԂɁA����ORC�@������SRC��|�����A ���ɂ�鏟���Ƃ����̂�����ȁ`�ƁB����͂������낢�ł��B - ���{�b�g�J�I�X
���{�b�g���t�B�[���h�ɕ��ׂĂ����āA����w�n��ڎw���ĂЂ�����i�݂܂��B ����͊y�����IARUMO-SiR�́A�㔼�ł�������I�t�F���X�ɓ���Ă�����ĂP�S�[�����܂����B AMATERAS����ɂ́A�ǂ����͏グ�܂���ł������c �f�W�b�g���{�����X�ɏ��˂��Ă��܂����C�����܂��B�����A�f�W�b�g����A���߂�Ȃ����B - �e�r��
�u����������v�i���߂čs���܂����j�ɂāA1/4�����O����������ł̉���ł��B �̂ނނ����ARUMO-SiR�̑��c�̌������Ă�����Ă�����A�l�`���������mabotan������V�тɗ��Ă���āA mabotan����Ɋ��S���Ă�������Ⴂ�܂����B�l�`����������A �u�����I�ŎQ�l�ɂȂ�v�Ƃ̂��J�߂̌��t���Ă��܂��܂����B
��ŁAAMATERAS�̑��c�������Ă��������ł����A�u�A�[�}�[�h�R�A�v�ȑ��c���@�Ȃ�ł��ˁI �����Ă�����Ă���Ƃ��́A�u�ց`�A�Ȃ�قǁ`�v�ƕ����Ă����̂ł����A��ŁA �ق肳�狳���Ă��炢�܂����BAMATERAS�����̂́A�Ȃ��h�L�h�L���܂��B - ���̂ق��c
������A���낢��Ə�����܂����B�䂳��̐�����s�b�͂ƂĂ��Q�l�ɂȂ�܂����B ����͎������Ă݂����ȁ`�B���A��������낤�Ƃ��Ă�����@���A�����ƃX�}�[�g�ł��B ���ƁAKAZZ�����CHOBI�̓����͂������낢�ł��B���^�@�́A�T�[�{�����߂�̂���J����̂ŁA ���������̂�����Ȃȁ`�ƁB���������A���[��ނ���A������������ł��������Ă��܂����B �������Ƀg���u�����悤�Ŏc�O��������ł����A������y���݂��ȁ`�ƁB



�������b�m�b�I
�I���W�i���}�C���h���V�^�b�m�b�̗\���t�J�n�Ƃ̎��APRX�����ɂ��܂����B
�؍�͈͂�15x10cm�Ƃ������ƂŁA���s�̍������c�Ɠ����Ȃ�ł����A
������Ƒ��k�����Ē������獄���������Ƃ̂��Ɓi�����Z�̂Ƃ���A�����܂���ł��j�B
�v���N�\���{�̂́A�l�b�g�ŒT�������ƈ����Ƃ��������܂����A
�ێ�̂��Ƃ��l���ăZ�b�g�ōw�����邱�Ƃɂ��܂����B������A���߂Ă̕��Ȃ̂ŁA
�Ȃ�ׂ��茘���s�������ȁ`�ƁB
���ƁA���M���ׂ����́A�I�v�V������3mm��4mm�̃G���h�~�����g����悤�ɂȂ邱�Ƃł��B
�����n��4mm�̃G���h�~���������Ǝv���̂ŁA����͂��肪�����ł��B
�����邩�ȁ`�A�����邩�ȁ`�i�������́A12��15�����\�Ƃ̂��Ƃł��j�B
�N���͂b�m�b�Ŋy���߂����ł��B���낢�댤�����āA
�W���C���g�p�[�c�Ƃ������p�̏����Ƃ�����肽���ȁ`�Ǝv���Ă��܂��B
�U�k�d�c���C�g���͂��܂����B |
���ĂƁc�܂�������ɂȂ肻���ł��B
�o������߂�܂��āA�o���܂ł��Ɩ�P�O���ԁB���Ă��āA�ǂ��܂ł�����傤�ł��邩�ȁ`���ƁB�v���{�̏[�d������Ă����Ȃ��ƁB
�܂��́A��{����̌���������n�߂āA�Ȃ�Ƃ����ˑ̂܂ōs�����Ǝv���܂��B���ˑ̂��āA�r�̒����Ɋ܂܂���ł��傤���H
���M�����[�V������ǂނƁA�u�ˋN�������v�Ƃ����ł����A���ˑ͓̂ˋN���ɂ����邩�ǂ����c�B���`��B
�NjL�F�����A���������ł��B���ˑ̎����͂�����߂܂��B�����̂������A�W���͂��c�B����ȏ���ƁA�Ȃ�~�X�������Ȃ̂ŁA �Q�邱�Ƃɂ��܂��B�Ƃ肠�����A������Z�̃u���V�A�b�v�ƈړ����x�A�b�v�͊������܂����B�Ӂ`�B���Ȃ݂ɍ��A�R���ł��B
�Z�F�O�����W���[���ו�����
����H�����I�[�_�[���Ă��Ȃ��̂ɁA�Z�F�O�����W���[����ו����͂��܂����B�Ȃ낤�H�܂��A
�m���Ă����Ж��Ȃ̂ŊJ���Ă݂�Ɓc

�����A������LED���C�g���I�I�I�i�����ł����c�j

���������A�ȑO�A�l���[�U�[����MonotaRO���������ɁA �I�[�v�j���O�L�����y�[���Ƃ������ƂŁu�A���P�[�g�ɉ��債��LED���C�g�Ă悤�v�݂����Ȃ̂�����܂��āA����ʼn��債���̂� ���������悤�ł��B�����`�B

�_��������ƁA�l���̍K����Ƃ炷�����Ƃ����邢�I�i�I�[�o�[�ł����A�ق�ƌ��܂Ƃ����ē�����Ȃ��l�Ȃ�ł���`�j�B �Z�F�O�����W���[����A���肪�Ƃ��������܂��`�B
ARUMO-SiR���ǁc�d���d���Ǘ� |
�����A���ς�炸�Z�����c
�Ƃ����킯�ŁA�{�����x���o�A���y�Əo���\�肠��Łu�����t�������ȁI�H�v��SISO�ł��B
�܂��T�[�{�����܂ł��ǂ蒅���Ă��܂��A�����͓d���d���Ǘ��v���O���������ǂ��܂����B
�ŏ��ɍڂ������́A�u��u�ł��������l���d��������������p���[�I�t�v�ɂ��Ă�����ł����A ����́A�u��b�ԁA�������l�����d���������葱������p���[�I�t�v�ɂ��܂����B�Ƃ����̂́A NiMH���ƁA�N�����̑S�T�[�{�p���[�I���̓˓��d���œd������u�A�T�u�߂��܂ʼn������Ă��܂��̂ł��B �������A���̌�͓������Ă��Ă�����Ȃ�̓d����ۂ��܂��B����Ȃ킯�ŁA �u��莞�ԊĎ��v����悢�̂��ȁ`�ƁB���|�̕��́A���������d��������Ȃ����B ����Łu�������l�v���U�u���炢�ɐݒ肵�Ă��A���|�ANiMH�̗����ɑΉ��ł���悤�ɂȂ�܂��B
���|�A�����ԊǗ��m�E�n�E���킩���Ă��Ĉ��S�Ɉ�����悤�ɂȂ��Ă����Ƃ͂����A��͂�A �ň��̎��Ԃ̎��ɂ͊댯�����Ȃ̂ŁA�܂��܂��C�����Ɉ����Ă������Ǝv���܂��B
���{�b�g�o�g�� in �������[�^�[�V���[ |
��[���A�D���`�i�ł��K�^�����������c�j
����͉Ƃɓ������āA�����C�������炷���ɐQ�Ă��܂��ă��|�[�g�ł��܂���ł����c�B�������d���I������̂P���Łc
�ł��A�������Ă��邤���ɂƂ������ƂŁA�Q��L�������Ⴂ�܂��B
���{�b�g�o�g�� in ���É����[�^�[�V���[�A����x��ł����A����w�݂̂Ȃ��܁A�k�k�o���܁A�Q���҂݂̂Ȃ��܁A �ق�Ƃɂ����l�ł����`�BARUMO-SiR�ł̃g�[�i�����g�͗D�����邱�Ƃ��ł��܂����B�����́u�^�v�ł����̂ŁA ���܂�傫�����ł͌����܂��ǁc�B�W���T�C�Y�@���g���u�����肵�Ă܂��āA����Ȓ��A �Ȃ�ƂȂ������ɓ������̂��悩�����ł��B�ق�ƁA���G�Ȃ����ɁA�g���u���͕|���ł��B
�ڍ׃��|�[�g
�G���g���[����ɉ����āA���[�^�[�V���[�̃`�P�b�g�܂Œ����Ă��܂��܂����B�Ƃ����킯�ŁA
�܂��̓��[�^�[�V���[�̕�������낿���Ɣ`���ɍs���܂����B����`�A�܂Ԃ����`�i���ĉ����H�j�B
���[���̕��́A���{�t�@�C�g���[������{�Ƃ��čs���܂����B�Ƃ����Ă��A����ȂɈ�a���͊����Ȃ���
�i�ނ���A�V���[�Ƃ��ẮA�������̕����킩��₷���Ėʔ����C������j�A�y������点�Ē����܂����B
�X�P�W���[�����^�C�g�Ƃ������ƂŁA�^�C�������A�v���X�g�b�v�����i���{�t�@�C�g���v���X�g�b�v�͖������������ȁj
�ł��B�r���~�߂ĊςĂ���������������A�����̎��������قƂ�NJς�Ȃ������̂ŁA
���|�[�g�A���������C���ł����܂���ł��B

- �܂��͎�t
���A��������ƁAASURADA��������ׂɉו����L�������Ă��炢�܂����B�V�^�u�w�v�c�r�H��{���������Ă��炢�܂������A �������ł��i�u�r�H�v�Ə������̂��|�C���g�j�B�I�^�X�P�W���p���̃E�G�_�b�`������A �悭�l�b�g�ł����O�͔q�������Ē����Ă����̂ł����A�悤�₭�I�^�X�P�W���p�������鎖���ł��܂����B �I�^�X�P�W���p���A�ڗ����Ă܂����B����ʂ��Ă���l���u���`�A���̃��{�b�g�`�v�ƌ����Ă܂����B ���`�ށA���炵���f�L�ł��B�{���Ƀ\���Ɍ����܂��B�����̂�Y��Ă��܂����̂ł����A �I�^�X�P�W���p���̓L�[�{�[�h����i�����ԈႦ�Ȃ��悤�Ƀ{�^���ɍH�����Ă���j�ɂȂ��Ă܂��āA ����ς���́A�v�����X�X�^�C���̂������Ȃ�ł��傤���B���̌�A���J�{���a�̕��삳��Ƃ� ���A�����Ē����܂����B���J�{���a�̓����ʍs�l����A�Ȃ��Ȃ��D�]�̂悤�ł��B�Ǝv���ĐU��Ԃ��Ă݂���A ����Zippon������t���l�ƂƂ���MAGI�̐���������Ă��܂����B ���̋X�y�[�X�ɃJ�[�y�b�g���������̂ŕ������Ă��܂������A�������X�s�[�h�ł��B�ђU�߂���́A KHR-1(HV)���������܂�Ă܂����B�ђU�߂���́A�ȑO�AMICRO-MG�Ń��{�b�g�������J-Class�ɂ� �Q������Ă������ł��āA����A�f�W�^���T�[�{�ɂȂ������ƂŁu�������y���`�A�y���`�v�ƌ����Ă܂����B ���̌�A�L��������������āA�R�l�Łu�y���`�A�y���`�v�Ƃ����b�����Ă��܂����B(^_^;
���ƁAOld-Rider����́A�Ԃ₵���Ɏ��ɃG���g������Ă��������ł��B�a�a�q�|�Q�̃`���[���[����́A �܂����{�b�g��菉�߂ĊԂ��Ȃ��Ƃ̂��Ƃł����A��������������ƍ�肱�܂�Ă���i�����Ƃ悭 ��������Ă���낤�ȁ`�j���{�b�g�ŁA�т�����ł��B�����������Ă��邤���ɁA���ɃL�����ƁA �����q����B�V�^�@�A�����ł��B�W���T�C�Y�T�[�{�ł����A�R���p�N�g�ɂ܂Ƃ܂��Ă��Ă��������ł��B ����ł��A�钆�������͉̂����C�ɂȂ�Ƃ̂��Ƃł��B�����������Ă��邤����HIDE����Ƃ��ALLP����A mabotan�����B���l�u�刟�v�`�[���́A�a�œ������x��܂������A���������B������́A �s�������Ȃ��Ȃ��Ă��܂��������ŁA���O�Ɋ����Ƃ̂��ƂŁA�c�O�ł����B - �����u���\�I
�W��ŊJ�n���A�c��S��ɂȂ�����I���A�Ƃ������ƂŁA�|���A�����A�|���A�����B �����Ȃ���A�����ǂ�����Ă����̂��͗ǂ��o���Ă��Ȃ��̂ł����A�o�g�����v�b�V���ł��B ����A�y�ʋ������������̂ŁA�y�������܂����B �l���Č���AARUMO-SiR�AG-Tune�̂悤�ȉ����Z�����Ȃ��̂ŁA�Ђ�����p���`�ʼn������݁A �Ȃ�ƂȂ��A�P�䂮�炢���Ƃ����悤�ȋC�����܂��B���̌�A���������O��Ɏc��A�\�I�ʉ߂��܂����B - ��P���
�L������̃��g���E�g���C�_�[�Q�Ƃ̑ΐ�ł��B�́A�́A�����`�B�������ł��B ���A�������A���ׂĂ̕����ɑ����Ȃ��A�Ƃ������ƂɋC�Â��Ă��܂��܂����B�Ƃ����킯�ŁA ���ɉ�荞�݂����ăS�c���ƈꏟ�B - ��Q���
�ђU�߂����Wiesel(�E�B�[�[��)�Ƃ̑ΐ�ł��B���`�ށA�Q���Ŏd�グ���Ƃ͎v���ʕ��s�B����܂� �Ȃ��Ȃ��̈ړ����x�ł��B�ł��A����ς肷�ׂĂ̕����ɑ����Ȃ��Ƃ������ƂɋC�Â��A ����܂���荞��ŃS�c���ƈꏟ�����܂����B - ������
���삳��̃��J�{���a�Ƃ̑ΐ�ł��B���J�{���a�A�W���T�C�Y�Ȃ̂ŁA�Ȃ������Ă��邾���ňЈ� ����Ă��܂��܂��B�J�n����A�̂�������́u���J�{���r�[�C���O�A�^�b�N�i����ɖ����j�v�ŁA �P�_�E������Ă��܂��܂������B�R�Z�͗p�ӂ��Ă������̂ł����A���܂�̂��₳�ɑ���̎��Ԗ����B ���̂�����A�܂��܂������̓ǂ݂��Â��ȁ`�Ɣ��ȁB���̌�A���܂����ƃ��J�{���a�̍��̃P�[�u���Ɏ肪�������̂ŁA �u���[�N��������O�ɃO�C�O�C�����������ŁA�Ō�A�����|���Z�ŗ��߂ē|�����Ƃ��ł��܂����B ���ǁA�}�V���g���u���ɏ������Ĉꏟ�B - ����
�哯�H�Ƒ�w�i�݂�Ȃ̂₷����I�y���[�g�j��RL02 Agni�Ƃ̑ΐ�ł��B�W���T�C�Y�Ȃ̂� ����ς�Ζʂ���Ƃ���`���B�Ƃ����킯�ŏd�����p���`�ɂ��߂����A ���J�{���a�ΐ�ŏo�������˂��h��Z���o��������Ă�����A�Ȃ�Ƃ����Ă܂����B��[���B ��Ȃ���A���̖h��͂����������I�i�Ȃ�Ďv���Ă܂����A���ʂ̂قǂ͋^��ł��j - �����u������
���l�u�刟�v�A�{�̔����I���́A�����g���u���œr���A��������Ă����̂ł��B �������AHIDE�����Vinsent�������g���u���œ����Ȃ������̂ŁA�����́A���ς�炸�g���u���̂P�ʂ����ł��B �������A�ǂ��킩��Ȃ����Ƃ������ł����B
���ĂƖ{��ɖ߂�܂��āc���������l�u�刟�v�A�܂��������l�ł��B�߂Â��Ă��郍�{�b�g���A �u���u���e������Ă����܂��BARUMO-SiR���A�ꔭ�Ń����O�����t�߂��烊���O�A�E�g�ł��B �}�W�ɔ�т܂����B�Ƃ����킯�ŁA���l�u�刟�v�D���B���`�ށA�������p���[�ł��B���l�u�刟�v�́A �uROBO-ONE�̒��ł��A�������o�����X���ǂ��ċ������{�b�g�v���Ďv���Ă���̂ł����A ����ς苭�������ł��B ����ł��A�����u���ő��̃��{�b�g����������ꂽ�莩����������̂����āA �����Ȃ�Ƃ����邱�Ƃ��ł����̂ŁA����̃`�����X�����ĉ������肽���ȁ`�Ǝv���Ă��܂��B
�����A�ʋΓr���Ńp���[�V���x�����A�[����U��č�Ƃ��Ă���Ƃ�����������܂����B �Ȃ������l�u�刟�v���v���o���܂����B����ɑf��ŏ����@���l����Ώ��Ă邩���c�Ǝv���܂����B ������Ė������Ă��ƁH���₢��A�~���͍��������y�����B - ���܂�
�Ō�A�݂�ȂŎ��Ԃ�������胉���u�����ėV��ł�����ł����c�Ȃ������ς��ȁ`�Ǝv���āA ���������q�U�T�[�{���牌���I���`�A�悭�݂�ƁA�T�[�{�P�[�X���Ԃ��Ԃ��ƖA�𐁂��Ă��܂��B �O���X�Ƃ�����Ȃ��āA�P�[�X���ł��B

�}���œd���J�b�g���܂����B�v���A�����O�ɂT���x�e���Ă���A�قƂ�Njx�ݖ����Ńt���p���[�ғ������Ă����̂ŁA �M���~�ς��Ĕ��c���n���������[�^�[���Ă����̂��ȁ`�B�₦�Ă���G���Ă݂��瓮�����a���Ȃ��Ă����̂ŁA ���[�^�[�������Ă���悤�ł��B���Ԃ�A���[�^��������āA���̌�A�d�������ꑱ���āc�Ƃ����p�^�[�����ȁB
���חʂ��l�����ĘA���ғ�������Ζ��Ȃ��Ǝv����ł����A����A�悤�₭PRS-3401�ɑ���o���l�� �オ���Ă����悤�Ɏv���܂��B�����AARUMO-SiR�A���߂��`�B������͂����ƋC�������`�B
����A���낢��Ȍo���邱�Ƃ��ł��܂����B�ق�ƁA����w�̊F�l�ɂ͊��ӂł��B
�܂��A�C�x���g���̂��̂��D�]�������i���\�A�ςĂ��Ă������������A�u�������`�A�������`�v
�Ǝ��₳��邱�Ƃ����������ł��j�̂ŁA����������������������t���Ă����Ƃ��ꂵ���ȁ`��
�v���܂��B�Ƃ���ŁA���c���m���āA�ǂ̕���������ł��傤�H�H�H
�NjL�i2005/11/23�j�F��͂肨����Ă��܂����B����Ƃ���낵�����肢�v���܂��`�B
�Ƃ����킯�ŁA�����o���l
- �i�����̋}���ȕ����]���ɂ��W���C���p������L���B
- PRS-3401�̃P�[�X�����헧�Ƃ������L���i�����������Ă����܂���ł����j�B ���ׂ̂�����A���ғ��ɂ͒��ӁB
- ���|�̓d���Ď��Ɂu��u�ł��U�u�����������琧��M��OFF�v�Ƃ������������ꂽ���A NiMH�i�P�R�j�ŋN���ł��Ȃ��Ȃ�B����Ȃ킯�ŁA�M���M���́u5.1V�v�ɕύX�B �ݒ�ύX�Ƀp�\�R��������̂͂�����Ƃ炢�B���|�́ANiMH�݂����ɁA�����Ɠd����������Ȃ��悤�Ȃ̂ŁA �u5.1V�v���Ƃ�����ƕ|���B���̂��߁A�ݒ�́u6V�v�ɂ��Ă����ăL�����Z���ݒ�ł���悤�ɂ������������̂����B ����͗��T�܂łɂ͂Ȃ�Ƃ����悤�B
- �ʐM�p�P�[�u����}���̂ɁA���������o�b�N�p�b�N���J����̂͂炢�̂ŁA�ǂ�������A �R�l�N�^���o���������悳�����B�o�b�N�p�b�N�̌��Ԃ���A�������ƃP�[�u�����o�����Ƃɂ��܂��B
- ����d�͂͂P����200mAh���x�B
- ���|�̓d���͂��������ȒP�ɂ͉�����Ȃ��B���d�\�͋���ׂ��B
- ���|�́A�����̍��Ԃɒlj��[�d���Ă���A�قڊԂɍ����B���ǁA�d�r���������BARUMO-SiR�́A ���ڂ����܂[�d�\�B
- �v���{�̃X�C�b�`�����[�h�X�C�b�`�̂悤�Ɏg���āi��{�p����ւ��j�A �i�����͊i�����̑��삵���ł��Ȃ��悤�ɂ������ǁA����͑吳���B
- ������Ɖ��������`�������Ē����܂������A�y�����ł��B
���{�t�@�C�g�Q�Ɍ����āA�T�[�{�����A����ꕔ�������A�ʐM�|�[�g�ݒu�A��ѓ���Ή���ڕW�ɂ���낤�Ǝv���܂��B �ł��A�����́A���������C��������Q�܂��`�B���ցA���������R�����`�B
PRS-3401�A���g���u���c |
��A��ꂽ�c
�{���́A�����A�x�݂���邱�Ƃ��ł��A�}�s�b�`��ARUMO-SiR�̉��ǂ��Ă܂��B
�Ƃ���ŁA���ɂ���Ă��܂��܂������B�T�[�{���P�A���߉ނɂȂ�܂����B �Ă�����Ȃ������ł����i�ɂ����Ƃ������������j�A�h��ȃA�N�V��������Ă�������܂����B �����A�������T�[�{�c�i�NjL�FPRS-3401���g���n�߂Ă��珉�߂āj�B�ŏ��A�͂������āA���͈͂̔������炢�ŗ͂�����Ȃ��Ȃ�A���̌�A �����Ȃ��Ȃ��Ă��܂��܂����B�Ƃ����킯�ŁA���������B���`���ƁA�ǂ�����Ă������O��邩�ȁH �i������A�������߂ĂȂ̂Łc�j

������ɂȂ肻���c�B
���{�b�g�o�g�������čĎn�� |
�L���b�`�A�b�v�J�n
�o������A�҂��܂����̂ŁA�L���b�`�A�b�v���J�n�B�\��ʂ�A���J�͂����G�炸�A���쐫�����
�ꕔ�̓���f�[�^�������ɍi���čs���܂��c�v�́AAction Script�����G��Ȃ��Ƃ������ƂȂ�ł����A
���X�A�d�l���J�����肵�Ă��邱��Action Script�A���͑���C���Ȃǂ�����ōs���Ă܂��āA
�v���|�X�e�B�b�N�����A�v���{�X�C�b�`���������ƁA���߂�ꂽScript���Ăяo�����悤�Ȃ��Ă��܂��B
���̒��ŁA�ǂ���A�ǂ����������ŌĂяo�����H�Ƃ����`�ŏ����Ă��܂��B
�Ⴆ�ASW1���a�ʒu�ɂ���ƒ������鑀��̏ꍇ�ASW1-B��Action Script��
EXST=2 # ���샌�x�����u���v�ɂ��A�V���ȑ���ŏ㏑������Ȃ��悤�ɂ���B VLRJ=0, 1, *EXIT, 0 # �����p���Ȃ�ΏI�� VLOP=SET, 1, 1 # NIAC=44 # EXIT= # @EXIT
�Ƃ��������ŏ����܂��B�eAction Script�́A�u���s���x���v�������Ă���A���s���ɑ���Script����㏑�����s���Ă��������ǂ����A �Ƃ����̂�ݒ�ł���悤�ɂȂ��Ă��܂��B�R�}���h�́uEXST(EXecution level SeT)�v�ł��B ��{�p���ڍs���́A�ς�Script���㏑�����s�����Ă��܂��Ɩ킩��Ȃ��Ȃ��Ă��܂��܂��̂ŁA ���x�����グ�Ď��s���܂��B�������A�u�E�́v�����Ȃǂ́A����ɍ������x�����ݒ肵�Ă���A ���ł��ł���悤�ɂȂ��Ă��܂��B
�uVLRJ(VaLue Record Jump�v�́A�u�ϐ��ɂ��Script���̃W�����v�v�ł��B�ϐ��l�ɂ���āA ���̍s�iRecord�j�ɃW�����v���܂��B�u0�v�̏ꍇ�́A�������Ď��̍s�ցc�Ƃ��������ł��B ���̎��X�̎p���́A�ϐ��ɐ��l�Ƃ��ĕێ����Ă���A���̏ꍇ�A�u���݂̎p����������������A ���������ɏI���v�Ƃ������ƂɂȂ�܂��B�W�����v��́A�u���x���v���g����悤�ɂȂ��Ă��܂��B
�uNIAC(Non-Inspection Action script Call�v�́A�W�����v�ł͂Ȃ��AScript�̃R�[�����s���܂��B �܂�A�R�[������Script����߂��Ă��邱�Ƃ��ł��܂��B����Script�̏ꍇ�A�߂��Ă��Ă��A ���܂胁���b�g�͂���܂��A�Ⴆ�u�����̓��������ꍇ�A�܂������ɂ������v�Ƃ����P�[�X�ł́A �З͂����܂��B���������̓���͌��܂�����{�p�����K�v�Ȃ̂ŁA���炩���߁A ���̂悤�Ȏp���ύXScript���L�q���Ă������ƂŁA����~�X�Ȃ̂ŕs�ӂɌĂяo���Ă��܂����Ƃ��́A �v���I�ȃ~�X������邱�Ƃ��ł��܂��B
����Ȋ����ő���n��Script�ō���Ă��܂��B
�����������{�b�g�o�g�� |
�킩�����Ⴂ�邯��
���`��A����̏o���͖Z�����`�B����Ǝd���͂˂ăz�e���ɖ߂����Ƃ���ł��B
���{�b�g�o�g���Ɍ����ĉ��ǂ��Ă�c�Ȃ�Ęb���ƁA�����A�Z�A�Z������A
ARUMO-SiR�ɐG��Ȃ��ɃC���C�������肵�Ă��܂��܂��B�ł��܂��A������������Ȃ��킯�ŁA
�����͂����Ƃ��炦�āA�u�y�j������Ŏd�グ��v���߂̏������Ђ����炷�邵���Ȃ��ł��ˁ`�B
�Ƃ����킯�ŁA�Q�鎞�Ԃ����X����Ă��܂��܁A���܂��܁A���܂��܁A
�yZz...�����ƁB
�C�x���g�ɏo��邾���ł����肪������ł����A����ς�C�����悭�s�������̂ŁA�m�b�i���Ă���낤�Ǝv���܂��B �����A���{�t�@�C�g���O�������悤�ȏɂȂ�\����i�Ƃ������A�����̃~�[�e�B���O�ŁA�قڌ���c(T_T�j�Ȃ̂ŁA �܂��܂������C�����ď㔼�g�t���[���͌��ǐG�炸�A�ɂȂ肻���ł��B�N���Ɋy�������ǂ��悤�B�ƂقفB
WideStudio���A�b�v�f�[�g |
����HSIPHA TERM�������Ȃ��Ȃ��������
�Ƃ����킯�ŏo�����Ȃ킯�ł����A���������Ȃ̂�SIPHA SYSTEM�̃o�O���������Ă��܂��B
��������WideStudio���C���X�g�[��������Ȃ��Ă݂ă��r���h���Ă݂���c
SIPHA TERM�������Ȃ��Ȃ����Ⴂ�܂����B�ȂA�N�������u�ԂɏI�������Ⴄ��ł���ˁ`�B
�悭�킩��Ȃ���ł����A�N�����ɕ\�����Ă���X�v���b�V���E�B���h�E��\�����Ȃ��悤��
�����瓮���悤�ɂȂ�܂����B�o�[�W�����͈�C��V3.80����V3.90-13�ł��B
���̃X�v���b�V���E�B���h�E�A���C���E�B���h�E������������鎞�ɕ\���w��������悤�ɂ��Ă��܂��B �����ł́A�E�B���h�E�����ۂɐ��������^�C�~���O���A�ȑO�̃o�[�W�����ƈقȂ��Ă���A ���C���E�B���h�E���������͂܂��X�v���b�V���E�B���h�E�̐������������Ă��Ȃ���Ȃ����ȁ`�ƁB ��ŃN���b�V�����Ă���̂ł͂Ȃ����Ǝv���܂��B�����������S�����ȃ^�C�~���O�Ɉڂ����Ǝv���̂ł����A�� �������S���ȁ`�B����ς�A���C���E�B���h�E���\�����ꂽ���炢���ȁ`�B
ARUMO-SiR���ǁc���|�r�ς݉������� |
���|�r�ς݉�������

�Ƃ����킯�ŁA�y���A���܂��܂Ƃ���āA���|�r�ς݉��������ł��B

����Ȋ����ŁA������ƃJ�o�[���ɂ��Ă݂܂����B���|���͂����̂͂��ʓ|�������āA�Б�����A�l�W�Q�{�͂����K�v������܂��B �ł��A���t������Ԃ̂܂܂ŏ[�d�ł��܂��̂ŁA�܂��ǂ��Ƃ��܂��B����̃��[���������Ă��A���肬�胊�|�ɓ���Ȃ��悤�ɂ��܂����B ����A�v���Ԃ�ɐڒ����܂������A����ς�ڒ��͓���ł��B�ܐ�́A������Ƃ�����ۂ����Ă��܂����A ���������A�T�b�J�[�Ƃ��ł���Ƃ����ȁ`�Ǝv���āA�����͏R��₷���悤�ɂ������Ă݂܂����B �Ȃ�Ƃ��A�����O��葫���̃f�U�C�����ǂ��Ȃ����C�����Ă���̂ł����A�e�o�J���ȁB
�܂��A�\�t�g���ǁi�ߕ��d��ŁA�d���d������������T�[�{�M���𗎂Ƃ��d�g�݁j������ĂȂ��̂ŁA �y���G���Ă݂������ł����A���|���Ă������ł��B���|����������Ȃ��āA���d�e�ʂɗ]�T�����邽�߂�������܂��A ���ׂ��|���Ă��A�قƂ�Ǔd�����ϓ����܂���B700mAh10C���Q�ςނ̂́A�������������ȁc�B ���ꂩ��d���Ď��v���O���������܂��B
���łɁA�[�d��̓d���p�^�[�~�i�������܂����B����ł�����ƈ��S���ȁB


ARUMO-SiR���ǁc�v�扺���C�� |
���Ԃ�����Ȃ��̂Łc
���ǁA���T�͂قƂ��ARUMO-SiR�ɐG��Ȃ��̂ŁA��肫�ꂻ���ȂƂ���Ōv��������C�����Ă܂Ƃ߂邱�Ƃɂ��܂����B
��肽���������́A�u�d�����|���v�A�u�o�b�e���r�ς݁v�A�u�㔼�g���^���v�A�u�d���d���Ď��v�A �u�����I����v�A�u����p�^�[���̒lj��C���v��������ł����A�u�㔼�g���^���v�͂�����߂鎖�ɂ��A �u�����I����v�̕��́ADVD�����ɂ���Ă킩�����A�������悭��鑀��~�X�̖h�~���������x�ɂ��邱�Ƃɂ��܂��B
�u�㔼�g���^���v�̕��́A���i�͂����قڂł��Ă���̂ŁA�g�ݕt�����̂��͉̂\��Ԃł��B �������A�T�[�{�ԋ����������ς�邱�Ƃɂ�铮��f�[�^�ւ̉e�����S�z�ł��āA ����f�[�^�̌������Ɏ��Ԋ|������́A����A �m���ɓ�����Ԃ���u���V�A�b�v���������悢���ȁ`�Ƃ������f�ł��B ����Ȃ킯�ŁA���̂Ƃ���ɋ��ł��Ă��܂��܂����A�����Ă������Ȃ��ł��������ˁ`�B
���ƁA�u�����I����v�̕��ł����A�_���Ă���Ƃ���́u���ʂȋZ�A�������I����v�Ƃ������̂ł��B
�ł��A����ɑ��ʂɂ���Ƃ����̂̓X�P�W���[�����ꂵ���Ȃ����Ȃ̂ŁA�����͂����Ɖ䖝���āA
����Ăяo���p�^�[����g�ݑւ��邾���ɂ��܂��B
SIPHA SYSTEM�ł́A�v���{����̓��͂ɑ��āAAction Script���Ăяo�����悤�ɂȂ��Ă��邽�߁A
�����ɃX�N���v�g�������Ă��A�u�������牽������v�A�u�����ꂽ�Ƃ��̎p���ʼn�������v�Ȃǂ̏�����
�L�q�ł���悤�ɂȂ��Ă��܂��B
���{�b�g�o�g���A���݂P�U��G���g�� |
���`�A�����Ă鑝���Ă�
�u���{�b�g�o�g�� in�@���É����[�^�[�V���[�v�ł����A
���̂܂ɂ��P�U����G���g�����Ă܂��B�u�刟�v���ĂȂ�ēǂނ�`���Ďv���Ă���A
�u���l�E�刟�v�Łu�܂���E�����v�Ȃ킯�ł��ˁI�Ȃ�قǁB�ǂ�Ȋ炪�t�����y���݂ɂ��Ă܂��`�B
�ȂA�֓��A���A���낢��ȂƂ��납��G���g������Ă܂��B�e���V�����������Ă��܂��ˁ`�i�܂����i����Ă邯�ǁc�j�B
�Ȃ�Ƃ��AARUMO-SiR�A�܂Ƃ߂����āA���y���݃}�V���ɂȂ�Ȃ��Ƃ����Ȃ��ł��ˁI
���T�͂܂��ڈ�t�o���Ȃ̂ŁA���T�������͋x�ނ��`�i���͂����Q�T�ԁA�x�݂Ȃ��ł��c�j�B �T�������ŁA�ǂ��܂Ŏd�グ���邩�ȁ`�A���`��B���ǒ��~���邩�B�肤�́A�y���o�Ζ����A �o���o�������j���ɂȂ疳�����ƁA���ׂ��Ԃ�Ԃ��Ȃ����Ɓc�B
���{�R���}�K�W��42���ŏ����Ȃ���������
�悭G-Tune�����Ă���������ɁA���h�ɂ��u�ق�ƂɎ���H�ł����H�v�ƕ������̂ł����A
�u��������č���Ă���v�Ƃ���������A�b�v���܂��B��ɂ���āA������Ƃ��Ă�����A
�Ȃ��̂����ɗ��Ă��ꂽ�̂ŁA���łɌg�тŎB���Ă��炢�܂����B

�N���b�N�ōĐ����܂��i2.5MByte�j�B
����Ȋ����ŁA�������������ۂ�������肵�Ă��܂��B���ۂ̍�Ǝ��Ԃ́A����̏ꍇ�ł��ƂV�����x�ł��B
�ŏ��͂���ȂɃT�N���Ƃł��Ȃ�������ł����A���䂩����Ă��邤���ɁA����Ȋ����ō���悤�ɂȂ�܂����B �@�ނ́A�����ɌŒ肵���d�C�h�����ƃf�B�X�N�����ł��B���̎g�����͖{���̎g�p�@�O�ł��̂ŁA �}�l�����ꍇ�́A�\�����ӂ��Ă���Ă��������B���{�R���}�K�W����42�ɂ͏����Ȃ������A �d�C�h�����̎g�p���@�̂P�ł��B
MICRO-MG�T�[�{�W���C���g�z�z�ĊJ |
���҂������܂����`�B
MICOR-MG�T�[�{�W���C���g�z�z���ĊJ���܁`���B

ARUMO-SiR���ǁc�H��J�n |
�H��J�n
�܂��́ACAD�ň�������V�[����ABS�ɓ\���āc

�|���`�ł��āc

��́A�h�����ʼn��H���₷���傫���ɐ��āc
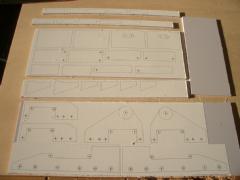
�����A�H��ɔR���܂��̂ŁA�z�[���y�[�W�X�V�A�邩���B
ARUMO-SiR���ǁc�v���� |
�悤�₭�v����

�����̂Ƃ���A�d������A�����ɂ��Ȃ�����Ƃ����ׂЂ�����Ƃ��Ői�݈���������ł����A ���ׂ̕��������ԗǂ��Ȃ��Ă����̂ŁA�{�i�I�ɍ�ƍĊJ�B �v�͊������Ă܂��āA�V�[�g�v���i�Ώۂ��v���X�`�b�N�Ȃ̂ŃV�[�g���^���ɂ��Ȃ�ł����Ă�ł܂��B�ς��ȁc�j �܂łł��܂����B���T�͏o�������̂ŁA���J�����͍��T�������I�ł��B�ŋ߁A CAD��SakraCad�ɕς��܂����B ������Ǝg���Ă����LilliCad�����芷����̂�����Ȃɓ���Ȃ��ł����c �ŏ��́A���j���[�Ƃ��I���Ƃ��ł��낢���������܂����B�ł��P���Ԃ��炢�ň�ʂ�g����悤�ɂȂ�܂����B �I�X�X���ł��B�悭����Ȃ������\�t�g������ȁ`�ƁA���S���Ȃ��犴�ӂ̋C�����Ŏg�p���Ă��܂��B
���āA���̓|���`�ł����`�B
���|�͏��������c��ށc
�u������ă|���`�ł����`�v�Ǝv���Ă���Amabotan�����i�Ђ炪�Ȃŏ����Ɓu�܂ڂ���v�B
����͂Ђ���Ƃ��āA�u����v�Ƃ��t�����Ɂu�܂ڂ�����v�Ƃ��Ăт���̂��������̂ł��傤���H�j��
�uGUARDIAN ��������@05�N11��2���v�ɏ����Ă����������n�^�Ǝv���o���܂����B
���|�A������Ƃ͖c��ނ炵���B
�Ƃ����킯�Ŏ茳�̖��[�d�������|���`�F�b�N����ƁA�m���ɁA0.3mm���c���ł��邱�Ƃ��B �����Ƃ��̐���A���������c��ނɈႢ�Ȃ��B�Q�ĂĐ}�ʂ��蒼�����āA���ڃX�y�[�X�̗]�T�𑝂₵�܂����B �r���Őv�~�X�ɋC�Â��Ƃւ��݂܂����A���O�ł悩�����ł��B
�[���d��̓d���v�� |
12V5A�d���łQ�̏[���d��͓��삷�邩�H
�[���d��p�̓d���́A�H���ōw������12V5A�̂��̂��g�p���Ă��܂��B
����A�V�����[���d���lj��w�������̂ŁA�d�����w�����悤���ǂ����Y��ł����̂ł����A�͂��Ǝv���܂����B
�d���ɗv�������\�͂́A�[�d�d���ɂ���Č��܂��Ȃ��́H
�Ƃ������Ƃł��B���g���Ă���o�b�e���́A�P�S��850mAh�U�{�p�b�N�A950mAh�U�{�p�b�N�A������700mAh�̃��|�ł��B �悭�l����Ɠ�����O���ۂ���ł����A�����̃o�b�e�����P�b�[�d�����Ƃ��Ă��A�P�`���炢���������Ȃ���Ȃ����ȁ`�ƍl���܂����B ����Ȃ킯�ŁA���Ԃ������̂ŁA���|�̍ď[�d���Ă玎���Č��鎖�ɂ��܂����B

�����͏�̎ʐ^�̂悤�ɁA�d���ɂ͗]�T�p���[�̃A���C���R�̂R�O�`�d���i�ȑO�AROBO-ONE�̏ܕi�Œ��������̂ł��j�A ����ɂ�����ƃP�[�u��������Đڑ����Ă݂܂����B

�[���d��̓d�����́A���ς�炸�݂̒��N���b�v�̂܂܂ɂ��Ă���܂��̂ŁA�K���ȃX�y�[�T��g�ݍ��킹�č��܂����B ����A���S���������Ύg�����肢���ł��B�ł��A��Ȃ����Ȃ̂Ō�ł����Ƃ����^�[�~�i���N���b�v����낤�Ǝv���Ă��܂��B



����Ȃ킯�Œ��ǂ��Q�ꏏ�ɏ[�d�J�n�B�ǂ�����[�d�d���͂P�b�i0.7A�j�ɂ��܂����B���|�[�d���͖ڂ𗣂��Ȃ����������Ƃ����̂ŁA �悻�����Ȃ���i�ڂ𗣂��Ă�H�j�ł����ꉞ�A�[���d��̑O�őҋ@�B���|�A�r���ʼn��x���G���Ă݂��̂ł����A�قƂ�ǔM���Ȃ�܂���ł����B �������ȁ`�A������R���Ⴂ�̂��ȁB

���̌�A�c��Q�̃��|�́A12V5A�d���ł�����̂ł����A�d�����M���Ȃ邱�Ƃ������A������Ɗ������܂����B ���������500mAh�A�P���Ԃ��ĂƂ���ł��B���|�p�[�d��́A�P�Z������4.2V���Ȃ��悤�d���𐧌䂵�܂��̂ŁA �㔼�A�[�d�d����8.4V�i�Q�Z�����j�ɂقƂ�njŒ肳��܂��B���̂��ߏ[�d�d����������A�ׂ��Ȍv�Z�������Ԃ�������悤�ł��B
�Ƃ���Łu�d���v�Ȃ�Ă����ĂȂ����`�v�ƌ������ɃI�X�X���Ȃ̂��A�H�����f�W�^���}���`���[�^ �l�`�r�|�W�R�W�ł��B SISO���P�����Ă���̂ł����A���i1400�~�ɂ��āA�Ȃ��10A�܂Ōv��܂��B��́A���W�R���W�Ō��\�ȓd�����v���ł�����̂�����悤�ł��B
���[�^�Ƃɂ�߂������Ă���̂��炢�̂ŁA���̂���PSoC�Łu�d���d���v���ł��ă��O�����āA �������T�[�{�̃Z���^�[�o���Ɋ��炵�܂łł���A���������e�X�^�[�v������Ă݂悤���ȁ`�Ǝv���Ă܂��B ���������A�d�����v������Ƃ��͐ڑ��ɒ��ӂ��Ă��������B�K������ɓ���Ă��������B �Ԉ���Ă��d���v�̂悤�ɕ���ɂ���Ȃ��悤�ɂ��Ă��������ˁB�ԈႦ��Ƒ�ςȎ��ɂȂ�܂� �i�d��������������ēd�����R������A�e�X�^����ꂽ��A���낢��c�j�B
�NjL�F�悭�݂���A�H���́u�f�W�^���}���`���[�^ �l�`�r�|�W�R�O�k�v�i1100�~�j�ł�10A����܂��B
ROBO-ONE���[���ɂ��čl���� |
�����ǂ����ȃ��[�����l���Ă݂�
�����ƁA����ɂ��Ă������ƍl���Ă����̂ł����ADVD���ς��葼�̕��̈ӌ����Ă��邤���ɁA
�悤�₭�ł܂��Ă��܂����B
����AROBO-ONE�Ƃ����̂́u�|���A�����O�A�E�g������v���Ƃɂ���ď������l�����܂��B�j�P�Ȃǂ̊i���Z�̏ꍇ�A ����Ƀ_���[�W��^���邱�Ƃŏ�����킯�ł����A����A���{�b�g���m�����肠���Ă��C�₷��킯�ł͂��肹��B �Ȃ�ƂȂ��A����̈ӌ����Ă���ƁA�j�P�Ƃ��͎q���Ɍ��������Ȃ��ƌ����Ă���e�䂳��ł��A ���o��I�����s�b�N�͂��q����ƈꏏ�ɊςĂ���悤�ȋC�����܂��B
�����̑傫�ȈႢ�́A�u�_���[�W��^���ď�����v���u�Z�����߂ď�����v�Ƃ���ɍ�������Ǝv���܂��B
ROBO-ONE�́A���ۂɃ_���[�W��~�ς����邱�Ƃ�ړI�Ƃ����U���͌����Ȃ��̂ŁA �u���o�v�Ƃ悭���Ă���Ǝv���܂��B���o�Ƃ����̂́A�Ƃɂ������ɂ��A�����ȊO���y�U�ɐڒn�����畉���ŁA ��́A��ɉ����o���ꂽ�畉���Ȃ̂��ȁ`�ƁA�f�l�ڂɗ������Ă��܂��B �Ƃ����킯�Œ�Ă��Ă݂悤���ȁ`�Ǝv���Ă���̂́A�u�Ƃɂ��������ȊO���ڒn������_�E���v����{�ɂ���A �Ƃ������̂ł��B�܂��A���o�ł́u��Ƀ_�E�����������������v�Ȃ킯�ŁA �����|���Ă���U�������y�U�O�ɏo�Ă��܂��Ă������͎������ɂȂ�܂���B
�������x�[�X��ROBO-ONE�ւ̓K�p���l����Ɓc���ƁB������h��ɂ��Ă����u�U���_�E���v��Y�ꂿ�Ⴂ���Ȃ��ł��B �u�U���_�E���v�ɂ��Ăǂ��l���Ă��邩�ƌ����ƁA�K�x�̎g�p�́A����̃��{�b�g�̃��x������l���� �A�i�����̂��̂��h��ɂȂ��ėǂ��Ǝv���Ă��܂��B��ŁA�����̓L�[�v�������Ƃ��납�ȁA�Ƃ����̂�����̂ŁA ���o�{���݂����Ȋ����������̂��ȁ`�Ȃ�Ďv���Ă܂��B
�ŁA�܂Ƃ߂�ƁA����Ȋ����łǂ����ȁ`�ƁB
- �Ƃɂ��������ȊO�������O�^�b�`������_�E���Ƃ���B
- �P�_�E���ŏI���ƂȂ��₵���̂ő��_�E�����͂T�_�E�����炢�ɂ���B
- �P�O�J�E���g�ȓ��ɗ����オ��Ȃ��ꍇ�͕�������B
- �����O�A�E�g�͂P�_�E���Ƃ���B
- �_�E����́A���{�b�g�����̋����ɗ����A�̐��𐮂������Ƃ��m�F���čĊJ�i�R���͗��҂Ɋm�F�j�B
- ��L�́u�ĊJ���ɑ̐��𐮂���v���Ƃ���A�ĊJ���A�Q�������U���\�B���肪�Q�������Ă���A���Ȃ��͖��Ȃ��B
- �U���Ŏ����������O�^�b�`���đ��肪�_�E�����Ȃ��ꍇ�́A�U�����_�E���B
- �Q�ғ��������O�^�b�`�i�܂��͒Z���ԓ��ɂ������A�̍U���������O�^�b�`�j�̏ꍇ�A�U�����s�������̓_�E�������ŁA�U�������ꂽ�����_�E���Ƃ���B
- ��L�̂Q�ғ��������O�^�b�`�P�[�X�ŁA�o���Ƃ��L���ȍU�������_�E�������ꍇ�́A�o���_�E�������Ƃ���i�������낭�Ȃ��W�J�Ŏ������I��鎖��h�����߁j�B
����̓���Ƃ���ɁA���݂����U�����ɃX���b�v���_�E�����̔��f��������Ƃ�����Ǝv���܂����A ��L���[���ł���A�u�Ƃɂ��������O�^�b�`���������_�E���v�ł��̂ŁA�V���v���ɂȂ�܂��B �܂��A���ς�炸�A�����U������̓���͎c��Ǝv���̂ł����A������̓V���v���ɂȂ�Ǝv���܂����A �U���_�E����X���b�v�̑��p�ɂ�鎎���̒��f�����炷���Ƃ��ł������ł��B �܂��A�N���オ�����Ƃ�����A�܂��t�@�C�e�B���O�|�[�Y������Ė����̂Ɏ������ĊJ���ē|����Ă��܂��Ƃ����A �Ȃ�ƂȂ��u�W�F���g���v����Ȃ��V�[���������Ȃ�A���a�m�I�Ȋi���Z�ɂȂ�̂ł͂Ȃ����Ǝv���܂��B
��́A�u�Z���o�����v�Ƃ����A�s�[���̂��߂ɁA�Z�������ԂƂ��A�C��������i�u�������`�v�A�u������`�v�Ƃ��j ���Ă����̂��A�K�{�ł͂Ȃ��A�R���ւ̃A�s�[���Ƃ��Đ����ɂ�����ǂ����ȁ`�Ǝv���܂��i�Z���͊��ق��Ă��������c �����̂͑����̂ŁA�o���Ƃ��ɖ��O���̂��̂���������ł��B�����݃A�b�p�[�A���������A�b�p�[�A �����A�b�p�[�A�Ђ��ς�g���b�N�A�ǂ��p���`�A�ǂ��A�^�b�N�A�܂��܂��g���l�C�h�c�j�B �u�����v���Ă̂́A�u�U���ӎv�m�ɂ��鎖�ɂ��A�R�����U�������������ǂ����A�����Ɋ������Ƃ��ɎQ�l�ޗ��ƂȂ�v �Ƃ������Ƃłǂ����Ǝv���܂��B�N�[���ȕ��͋C�ł�肽���ꍇ�́A�Ȃ�ׂ������ȍU����������悤�ɐS������Ƃ��B
��A�R�}���h��������̓~�X�Ń_�E�����U�������������ɂȂ����ꍇ�A �u�����܂���I�v�Ƌ��ԂƃC�G���[�J�[�h���L�����Z�������Ȃ�Ă�������������܂���ˁB
�Ƃ����킯�ŁAROBO-ONE�ψ���Ƀ��[�����Ă݂悤�B
���|�̒��ӎ��� |
E-Tec ���`�E���|���}�[�d�r
���������d���B�ق�ƂȂ炨�x�݂Ȃ̂Ɂc�܂���������o�������B���A���`��B
���Ă��āA����w�������A�uET-HPV2-0700-2S�v�ł����A�l�b�g�Œ��ׂĂ�����A E-Tec���|�Ɋւ��钍�ӎ����̃y�[�W�������܂����B �悭�������钍�ӎ����̑��AE-Tec���|�Ɋւ��Ĉȉ��̏����܂����B
- �[�d�d���́A�ő�1C�ł���B
- �[�d�ɂ́A�K�����|�Ή��̏[�d����g�p����B
- �P�Z��������A2.5V�ȉ��ɂ͐�ɕ��d���Ȃ��B
- ���������ʂ͖����A�lj��[�d���邾���ł悢�B
- �g���Ă��邤���Ɋe�Z���̓d���ɂ�����łĂ���B
��d�����g�p����ꍇ�A��10�T�C�N���Ɉ�x�A�e�Z���̓d�����m�F���������悢�B

���̑��A���|�o�����T�̋@�\�ׂĂ�����A�u�o�����X���ǂ���ԁv�Ƃ����̂́A �d���̍���0.02V�ȉ��̂��Ƃ��������Ƃ��킩��܂����B0.2V������������A�_���_���݂����ł��B �u���|�o�����T�v�Ȃ鐻�i������܂��̂ŁA�o�����X������Ă����炱��œd�������킹�Ă��悢�Ǝv���̂ł����A �����A�d�������킹�邾���ł���A���d����o�����T�[�[�q�ɂȂ��ŁA �P���Z���̓d�������킹�Ă������̂��ȁ`�Ǝv���܂��B �Ƃ����킯�ŁA������ƒ[�q�ׂĂ݂邱�Ƃɂ��܂��c�Ƃ���܂��l�b�g�Œ��߂Ă�����A ���|�o�����T�̃}�j���A��������܂��āA���ꌩ����ڂ��Ă܂����B 5P�̃R�l�N�^�����ĂāA�ォ��A�u1:�ԁA2:���A3:���A4:���A5:���v�ƂȂ��Ă��܂��āA �Q�Z���̏ꍇ�A�u1:�{�A2:�Q�Z���̐^���A3:���A4:���A5:�|�v�ƂȂ��Ă���悤�ł��B �܂�A�u�{�v�Ɓu�|�v�́A�o�͒[�q�Ɠ����Ƃ���ɂȂ����Ă���݂����ł��ˁB �Ƃ������Ƃ́A�u2:���v��������A�o�����X�����ł������ł��B�o�����T�[�[�q�͌��\�傫���̂ŁA �u2:���v�����c���Đ����Ⴈ�����ȁ`�B
�Ƃ���Ń��|�A�M���k�`���[�u�ŕ��ł����āA����ʂ��Ă���P�[�u���Ƃ��Ń��R���R���Ă��܂� �B�Ƃ����킯�ŁA���ۂ̊O�`���@�i�ő�j�𑪂��Ă݂܂����BET-HPV2-0700-2S�̏ꍇ�́A 65x27x12mm���ĂƂ���ł��B
����ς肻������ȏ[���d�� |
�O�ϔ�r
�����������{�ɂ��Ă��A��Ђ���A���Ă����23:30�c�B���`�B�܁A���������������邾�낤�Ƃ������ƂŁA�Ȃ�Ƃ�����낤�B
�Ƃ����킯�ŁA�莝���̃X�����[�`���[�W���[�A�h�o���X�ƁAHyperion EOS 5i�̊O�ϔ�r�����Ă݂܂����B
�F���Ⴄ�̂ŁA�傫�����Ȃ�ƂȂ��Ⴄ�悤�Ɍ����܂����c�l�W�̈ʒu�܂ł�������ł��B
�@�\������ǂނƁA3.6V�Ή����Ă��Ȃ����Ƃ��Ⴄ���炢�i���j���[�����̕��A�����Ⴂ�܂����j�̂悤�ł��B


��́A�d���P�[�u���̒������Ⴂ�܂��B�{���A�Ԃ̃o�b�e���[�Ȃǂɐڑ�������̂Ȃ̂ŁA �{���̖ړI�Ȃ�Β��������g���₷���Ǝv���̂ł����A100V��12V�d���h�ɂ͂�����ƒ������ł���ˁB �O����A�R�l�N�^�ɑւ������ȁ`�Ǝv���Ă���̂ł����A�Ȃ�ƂȂ����Ă�������̂��A�����ȁ`���S�O���Ă܂��B
ARUMO-SiR���ǁc���������̂Q |
����ɂ���Ȃ��̂��Ă݂��肵��
���g���x�����J�ɂăI�[�_�[�����A
�ꖜ�~�ł���̂���[���d����
���|�������B
����`�A�����A�����B�֗��Ȑ��̒��ł��B���͂��̃��|�A�ɂ���������������̂Łu������܂����H�v�Ǝ��₵����A
���ׂ��Ă����Ƀ��[���A������܂��āA���������̍w���ł��B�Ƃ肠�����A�S���A�d���`�F�b�N�i���̃R�l�N�^�A�s���w�b�_�����傤�Ǔ���܂��j����
7V�ȏ゠�邱�Ƃ��m�F�i����7.5V�������j�B���|�́A�d�r��ɂ���Ƃ܂����Ƃ̂��ƂȂ̂ŁA�ۊǎ�������I�ɓd���`�F�b�N�����Ȃ��Ƃł��ˁB

���|�́Amabotan������̂Ƃ���A�o�����X�p�H�R�l�N�^����������Ă��܂��B�ǂ�����Ďg�����́A�Ȃ�Ƃȁ`���z���ł���̂ŁA �ڂ��ڂ����ƃ`�F�b�N���Ă݂悤�Ǝv���܂��B���̃��|�A���d�\�͂�10C�Ƃ������ƂŁA����Ȃɍ����\�Ȃ��̂ł͖����̂ł����A ���̌`�Ɏ䂩��܂��čw�����܂����BARUMO-SiR�ɍڂ��܂����A�Q�A�����ɍڂ���\��ł��B�\�͓I�ɂ͂P�ł���薳���̂ł����A ������ƃt���[���\����ς��悤�Ǝv���Ă��܂��āA���̊W�łQ�ڂ��ɂ��܂��B
����ɂ��Ă��A�ʔ̂��āA���i������������ɁA�u���A������I�[�_�[���Ă����悩�����`�v���� �v�����ƁA�悭����܂��H����́A�^�[�~�i���N���b�v�������Ă����悩�����`�Ǝv���܂����c�A�͂��B�܁A����͎��삵�悤�B