Power
Supply 単4x6本で、制御、動力ともにまかなっています。トラブルは…一度だけ、微妙なトラブルが起きた(過負荷が連続してかかり、CPUがRESETともHALTともつかぬ状況になった)んですが、G-Tune2004FIを開発している時から発生している別の問題の可能性もあり、どちらかといえば、後者と考えています。 一般に売られているニッケル水素850mAHを自作で組み電池にして使用しています。充電、放電には、秋月で売られているキットを使用しています。
Design Detail
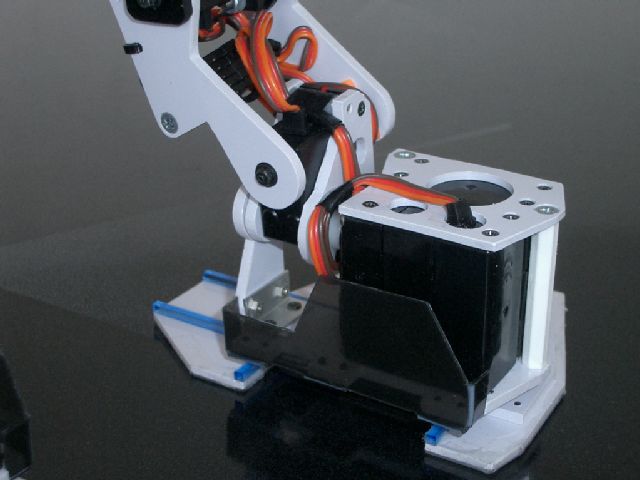
Over View of Mechanical
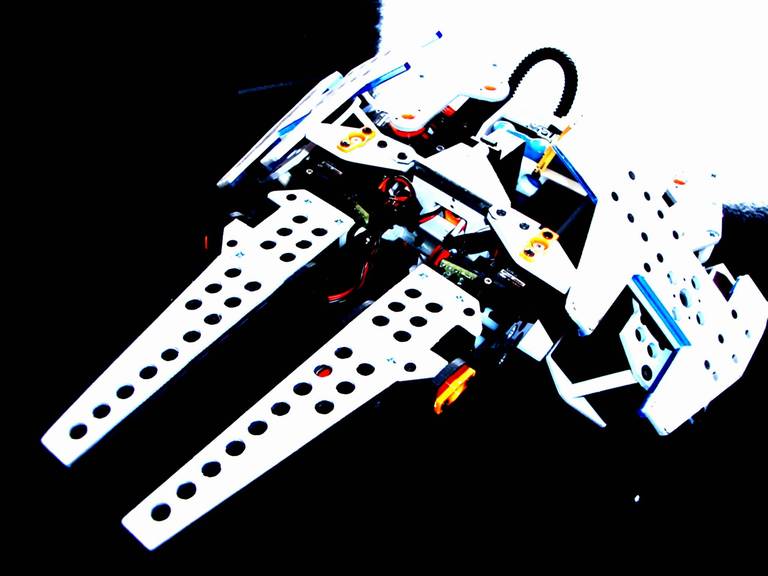
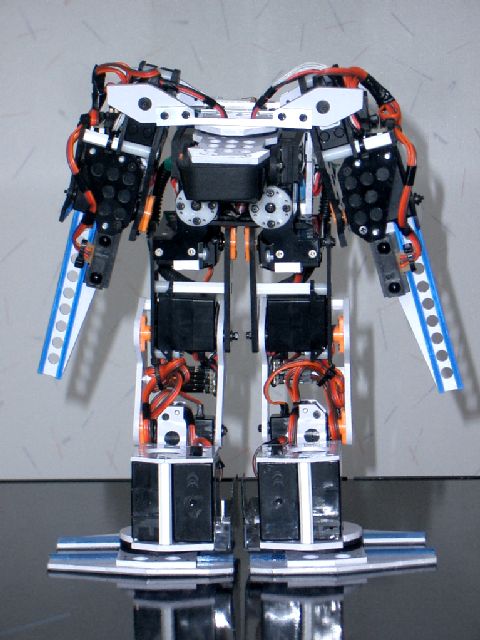
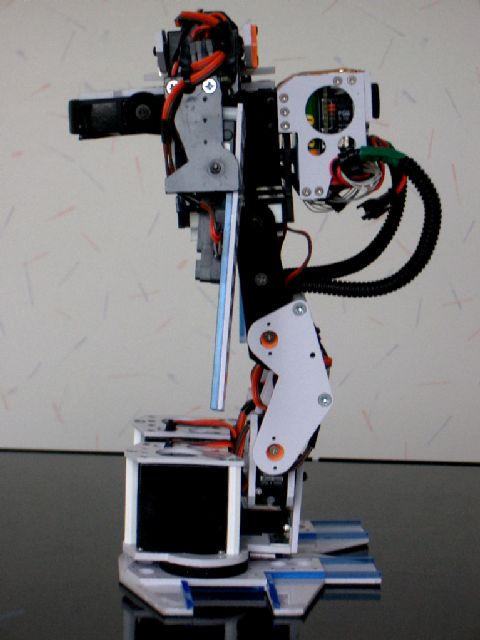
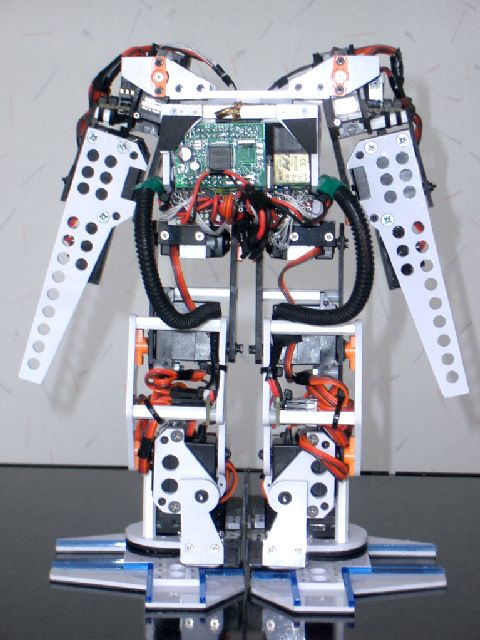
Design なかなか同じ大きさに写真をとるのが難しいのですが、直立状態で、それぞれの方向から見るとこんな感じです。デザイン上の特徴としては、脚部が逆間接構造になっており、ヨー軸が足首についています。脚の先に突いている黒い箱は何?と時々聞かれるのですが、これはS03Tを2つ、ロール軸方向とヨー軸方向にそれぞれ向けてレイアウトしてるため、ぱっと見、黒い立方体がついているように見えます。
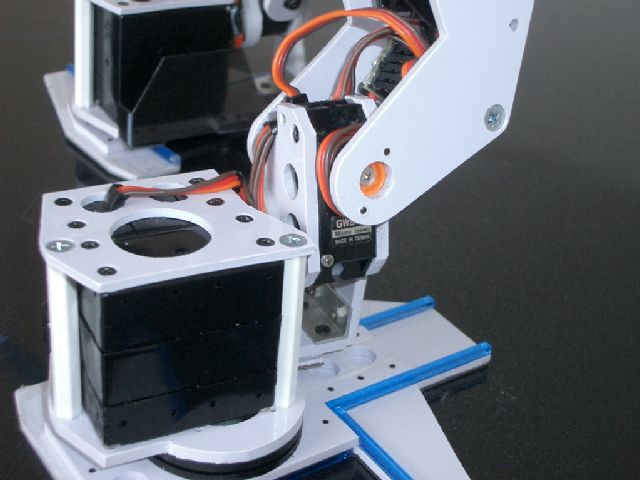
Arm
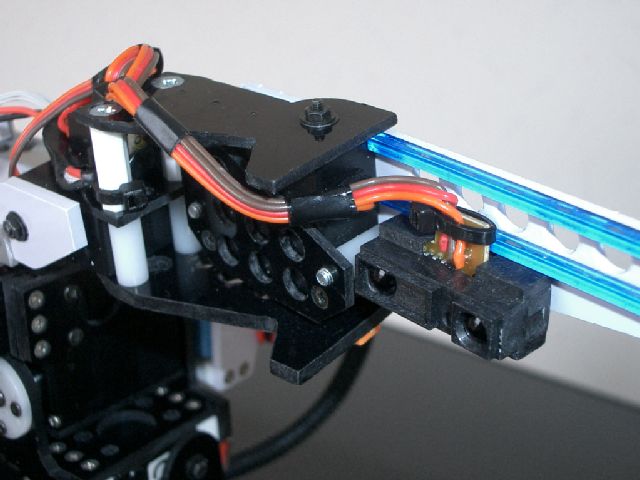
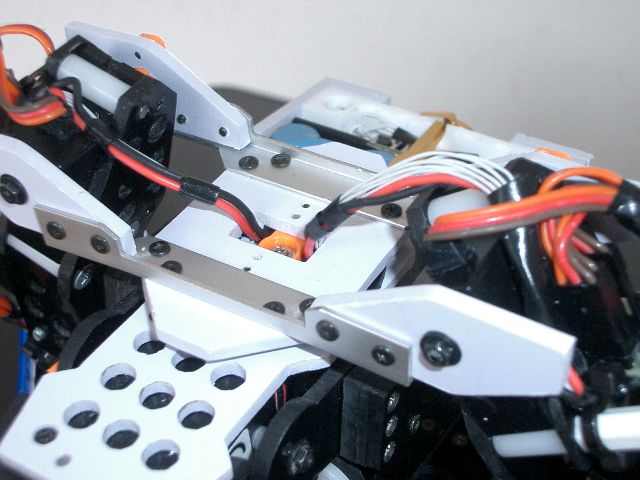
Units 腕も、他の構造同様、ABSの板材をスペーサで接続することで製作しています。自由度は…実は2しかありません。でも、側転もできますし、背中を接地しない前転、逆立ち、片手逆立ちもできます。この2軸のレイアウトは、密かに、悩みに悩んだ2軸です。 また、PSD距離センサを搭載しています(両面テープで貼ってあるだけだけど)。PSDセンサは、腕の伸びている方向につけるか、現在のような向きにつけるのか非常に悩みましたが、飛行形態の時に地面との距離が検出できるという理由から、この向きになりました。
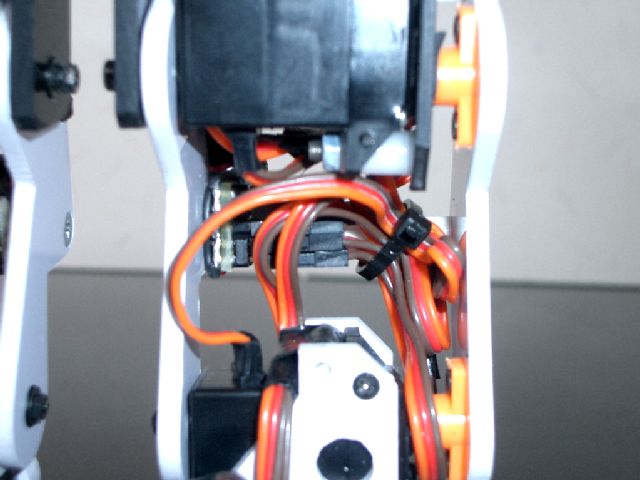
Leg
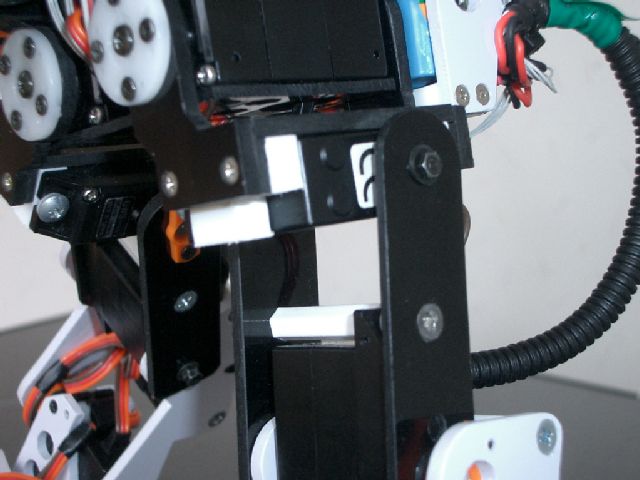
Units 脚は逆間接ですが、ま〜、逆向きについているというだけで、他のタイプの脚と大きく違うわけではありません。一番上をロール軸としており、ヨー軸は足首についているタイプです。また、ヒザの部分で5個の脚サーボ(最上部のロール軸を除く)の集線を行っています。脚用には今回、0.4sqの線を2セット、電力線として使用したのですが、ひょっとしたら1セットでも大丈夫かもしれません。使っているサーボがアナログサーボですので、制御信号の入力タイミングによって電力消費ピークをコントロールでき、その効果もあったかもしれません。 苦労したところと言えば、モモのピッチ軸サーボの固定です。ここは、腰ブロックのロール軸から90度向きが変わりますので、結局、100円ショップで売っていた、PP板を削り出して直交パーツを作りました。ただ…この100円ショップで売っているPP板、6mmといいながら、かなりラフですので、削りだす練習台にはベストですが、ちゃんとしたもの(例えばFさんのところで売っているABS板とか)を使った方がよいです。
{kind=link}




{kind=link}