|
���������cOAKS16-MINI |
OAKS16-MINI ���́A������T�ԁA�I�[�N�X�d�q�����l�T�X�̃z�[���y�[�W����}�j���A�����_�E�����[�h���Ē��߂Ă�����ł����AOALS16-MINI�A�P�����Ă݂܂����B�w����́AROBO-ONE�ɂ��G���g���[����Ă����`���[���[����������ł��B
���́A������T�ԁA�I�[�N�X�d�q�����l�T�X�̃z�[���y�[�W����}�j���A�����_�E�����[�h���Ē��߂Ă�����ł����AOALS16-MINI�A�P�����Ă݂܂����B�w����́AROBO-ONE�ɂ��G���g���[����Ă����`���[���[����������ł��B
�l���Ă݂��OAKS16-MINI�A�Ȃ�ƂȂ��ł����AAKI-H8/3664�������ăp�t�H�[�}���X�������悤�ȋC�����܂��BI/O���͂قړ����i1�{����OAKS16-MINI�̕��������j�悤�ł����AROM��H8/3664�̔{�A�N���b�N��������Ƒ����ł��B
����A�t���L�b�g�i�e�X�g�p�}�U�[�{�[�h����R���p�C���A�{�́A�d���܂ň�ʂ���Ă���j���w�������̂ŁA5000�~�z���܂������ACPU�{�[�h�P�̂ł݂���1500�~���炢�ł��B�܂��t���L�b�g���A�H���ŏo�Ă���uH8/3664�J���L�b�g�v���1000�~�قǍ����̂ł����A�d������������Ă���̂ŁA��r���Ă��������̂ł͂Ȃ��Ǝv���܂��B
�����A���̎ʐ^�ɂ́A�uLCD�������{�[�h�v���ڂ��Ă��܂����A���g�ɂ͊܂܂�Ă��܂���̂ŁA�v���ӂł��B���O�ɁA�I�[�N�X�d�q����}�j���A���𗎂Ƃ���܂��̂ŁA����Ń`�F�b�N���Ă����킩�邱�ƂȂ̂ł����A�I�v�V�����ł��B�ł��A�u�����Ǝv���Ă����v�̂ɁA�u����LCD�̎ʐ^�����Ă��āAFullKit�Ə����Ă������v�̂ŁA������Ɗ��҂��Ă��܂��܂����B
OAKS16-MINI�̃s��


���āA�u���̃{�[�h�ɂ��Ă���s���́A����Ȃ��̂Ȃ̂ł͂Ȃ����낤���H�v�Ƃ������Ƃ������ƋC�ɂȂ��Ă�����ł����A�茳�ɂ������H���ōw������26P�̂��̂Ɣ�r���Ă݂���A�ς��ƌ��Ƃ��A�}���Ă݂������Ƃ��͂���Ȃɍ��͂���܂���ł����B�莝���̕��i�ł��g�������ł��B
�����R�A�ɂ��悤���ǂ����A�܂������܂ł͍l���Ă��܂��A�ŋ߁A�����ԃ}�C�R���v���O���~���O�Ɋ���Ă��܂����̂ŁA�u���[�R�X�g�A�n�C�p�t�H�[�}���X�v�Ȃ��̂�����A���낢�뎎���āA���J���Ă��������Ǝv���Ă��܂��B�܁A�܂��̓R�e�����ɁALED�̓_�łł�����Ă݂邱�Ƃɂ��܂��B
|
OAKS16-MINI��Full Kit�g�ݗ��Ă܂����B |
���Ԃ��������ĐS�����������Ȃ��c
�悤�₭�g�ݗ��Ă܂����B����ρA�T�����[�}���A�ǂ����Ă���Ƃ͏T���ɂȂ��Ă��܂��܂��BSIPHA CORE�Ƃ��Ɣ�ׂ�Ƃ��̂��������W�x���Ⴂ�̂ŁA�ǂ����S�����������܂���B�����ƁA����R�A�ŃT�C�Y�ɂ�������Ă�����݂͂�ȓ������ƁB
�g�ݗ��ẮA�������ǂ���Ȃ�ł����A�P�����ւ��܂����BCPU�{�[�h�̃s���t���[��������Ƃ���A�����悭������A�R��S���p�^�[�����Ȃ����Ă��܂����B�Ƃ����킯�ŁA�Q��̃s���t���[�������Ă݂܂����B�茳��50P������Ίy��������ł����A���������̂ŁA40P��10P���Q���A����Ă��Ă��܂��B
�s���t���[�����āA�ǂ����ďc�����ɂ���������ׂ��Ȃ���ł��傤�ˁ`�B�c�����ɖ������Ă���Ƃ��́A��������Ă���ڂ��Ă��܂��B
�ŁA������ǂ��g�����Ƃ����܂��Ɓc�i�g�����ǂ����́A���́A�S�R�l���Ă��Ȃ���ł����c�j
�s���w�b�_�̂ق��ɓd���������āA����ȃR�l�N�^�̂悤�ȕ�������Ă����A�e�X�g�p��CPU�̂����璼�ɐM�������o����悤�ɂȂ�܂��B
�����A�֗������I�Ǝv��ꂽ���̓g���C���Ă݂Ă��������B�͂��B
�Ƃ����킯�ŁA�f�o�b�K�o�R�Ńv���O�������s�ł��܂����B�����́A���悢��A���j�^�v���O�������Ԃ��āuROM�����v���悤�Ǝv���܂��B���āA���̊�A�ǂ�ȕ��Ɏg���Ă����܂��傤�B
|
OAKS16-MINI�Ńt���b�V��ROM�������� |
�t���b�V��ROM�������݃e�X�g����
����A�f�o�b�K�o�R�ł̃v���O�������s���ł��܂����̂ŁA�����́A������āAROM�����Ƀ`�������W���܂����BTM���g���āA�u�v���W�F�N�g�̐V�K�쐬�v����uFlash
Starter�ŏ������݁v�܂ł��܂����̂ŁA�ȒP�Ƀ��|�[�g���܂��B
�O��Ƃ��ẮAOAKS16-MINI�t���́A�uMan_miniFullKit.pdf�v�ɏ]���Ĉ�ʂ�̍�Ƃ��I����Ă�����̂Ƃ��܂��B�܂��A���ۂɎ��s�����v���O�����ł����A�T���v���ɂ������umini1.c�v���C�����Ďg���Ă��܂��B
���v���W�F�N�g�̐V�K�쐬�ƃf�o�b�K�Ŏ��s
TM���C���X�g�[������ƁA�uTM���[�U�[�Y�}�j���A���v�Ƃ����̂��ꏏ�Ƀ��j���[�o�^����܂��̂ŁA�u�N�C�b�N�c�A�[�v�i�܂��낳�����j��ǂ݂Ȃ���A�V�����v���W�F�N�g�����܂��B�u�A�C�e���̕ҏW�v�|�u�A�C�e���̒lj��v�ɂă\�[�X�t�@�C����lj����܂��B���̏ꍇ�A���ꂩ����t�@�C�����ł��\���܂���B
 �@
�@
���ɁA�uMan_miniFullKit.pdf�v��7.1.2.��ǂނƁA�uSTARTUP�t�@�C����CD����R�s�[���ĉ]�X�v�Ƃ���̂ŁA�悭�킩��Ȃ��̂ł���CD����R�s�[���܂��BKD30���g��Ȃ��ꍇ�͕s�v��������܂���B
�����ăv���O�����������܂��B����́A�y�����Ƃ������ƂŁAmini1.c���Asfr26.h�ɂ��킹�ď������������̂��g���܂����B����sfr26.h�Ƃ����w�b�_�t�@�C���AM16C/26�̃��W�X�^��`������`����Ă���w�b�_�[�t�@�C���ł��BH8/3664�Ƃ�����Ă�����ł��ƁA�u3664.h�v�Ƃ������Ƃ킩��₷���ł��傤���H
���NjL�F�ȉ��̃\�[�X�R�[�h�ł����A���"sfr26.h"���������Ă�����Ap7_addr.byte��p7�ցApd7_addr.byte��pd7��#define����Ă��܂����B����āAmain()���̒��́A���ɏC���͕s�v�ł��邱�ƂɋC�Â��Ă��܂��܂����B
//--------------------------------------------------------------------------------------
// �t�@�C�����F LedBlink.c
// ���e�F LED�_���iLED2,3�����݂ɓ_���@�\�t�g�E�G�C�g�j
// OAKS16KIT��mini1.c����{�Ƃ��āAsfr26.h���g�p����悤�ɕύX
//--------------------------------------------------------------------------------------
// �C���N���[�h�t�@�C��
#include "sfr26.h"
// �v���g�^�C�v�錾
void _main(void);
// �}�N����`
#define LED2_on 0xdf // LED2(p75)�_��
#define LED3_on 0xef // LED3(p74)�_��
#define LED_off 0xff // LED����
main(){
unsigned long i;
p7_addr.byte = LED_off; // �|�[�g7�o��H(LED�����j
pd7_addr.byte = 0xff; // �|�[�g7�����o��
for(;;)
{
p7_addr.byte = LED2_on; // LED2�_��
for(i=0x4ffff;;){ // ���ԑ҂�(�\�t�g�E�G�C�g�j
i--;
if(i==0) break;
}
p7_addr.byte = LED3_on; // LED3�_��
for(i=0x4ffff;;){ // ���ԑ҂��i�\�t�g�E�G�C�g�j
i--;
if(i==0) break;
}
}
}
��̓r���h���āA�Ƃ肠�����f�o�b�K�iKD30�j�Ńe�X�g���Ă݂܂��傤�BLED��mini1.c�Ɠ����悤�Ƀ`�J�`�J�_�ł���͂��ł��B
��TM��MOT�t�@�C���쐬�̐ݒ��lj�
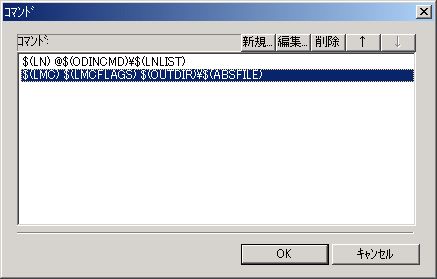
���āA�ǂ������MOT�t�@�C�����쐬���邩�Ƃ����ƁA�uMan_miniFullKit.pdf�v�́u6.3.8.�v���W�F�N�g�G�f�B�^�T�v�v���悭�ǂނƁA���A�C�e�����r���[���̐����̂Ƃ���ɁA�u�Dflashstart�i�t���b�V��ROM�ɏ������ނ��߂̃\�t�g�j�Ŏg�p���郂�g���[�����t�H�[�}�b�g�̃t�@�C�����쐬���邽�߂̃R�}���h�ł��B�v�Ƃ�������������܂��B��������āu���ށA�����Ƃ����lj���������ɈႢ�Ȃ��v�Ǝv���Ēlj����Ă݂܂����B
�A�C�e���̕ҏW�v�|�u�R�}���h�v��I������ƁA���̃E�B���h�E���\������܂��B����ɂ́A�r���h�̍Ō�Ɏ��s�����R�}���h���L�q����Ă��܂��B
�u�V�K�v�{�^���������āA�����ɁA�u$(LMC) $(LMCFLAGS) $(OUTDIR)\$(ABSFILE)�v��lj����܂��B
����Ńr���h����ƁA�g���q���umot�v�̃t�@�C�����ł�������܂��B������uFlash Starter�v�ŏ������߂�OK�ł��B
��SAKURA�G�f�B�^
���́A���SAKURA�G�f�B�^���g���Ă���̂ł����A�����TM�ɓo�^����ꍇ�A�s�ԍ��̎w��������ƕ֗��ł��B�r���h�ŃG���[���o���ꍇ�A�r���h�̃E�B���h�E����_�u���N���b�N���ăW�����v����ƁA�\�[�X�t�@�C�����J���āA�Y���s�܂ŃW�����v���Ă���܂��̂ŁA�Ȃ��Ȃ��֗��ł��BTM�́u�I�v�V�����v�ŁA�uEDIT
TOOL�v�ɃG�f�B�^��o�^���A���̎��ɁAParameter�Ɂu%F -Y=%L�v���w�肵�܂��傤�B
���Ō��
�Ō�ɁA�܂��f�o�b�K���g���\�肪����̂ł�����A���j�^�v���O�������������݂܂��傤�BCD-ROM�́u\oaks_mini\Monitor�v�ɂ���܂��B�����Flash
Starter�ŏ������߂�OK�ł��B
|
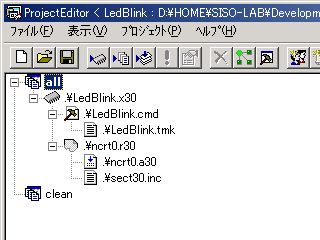
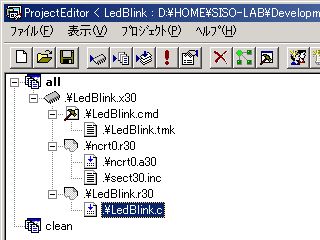
TM��.tmk�t�@�C�� |
.tmk�߂Ă�����
����Amot�t�@�C���̍쐬�A�������݂ɖ������������킯�ł����ATM�Ńv���W�F�N�g������Ǝ����I�ɂł���u.tmk�v�Ƃ����t�@�C���A�悭���߂Ă�����A������umakefile�v�̂悤�ł��B�悭�݂���A�ut�v�́umk�v�c���O�ŋC�Â��Ȃ����`�ƌ����Ă��܂������ł����A���܂�ڂ����Ȃ���Łc�͂��B
�Ƃ����킯�ŁA����Amot�t�@�C���̂��߂ɒlj������u$(LMC) $(LMCFLAGS) $(OUTDIR)\$(ABSFILE)�v�ł����A.tmk�t�@�C���̏�̂ق��ɁA$(LMC)�̒�`�������Ă���܂����B�uLMC30�v�Ƃ����v���O�����ł��B�r���h����ƁA
�uLMC30 -L �o�̓f�B���N�g��\�قɂ���.x30�v
�Ƃ����R�}���h���C���Ƃ��Ď��s�����Ǝv���܂��B�����Ă͖����ł����ǁA�R�}���h���C���h�̕��́A�悩�����炨�������������B
�Ƃ���ŁATWO LEGS����̂Ƃ���ŁA�uOAKS16-MINI�ŗV�ԁv�Ƃ����R���e���c���lj�����Ă��܂��I�������B�I�[�N�X�d�q�Ńe�N�j�J���j���[�X�������ł��ˁI�����`�F�b�N���Ă݂悤�B����Ɂc�l�R�̊炪�ۂ��Ȃ��Ă��܂��B���H���H������ۂ��Ȃ��Ă܂����H�H�H�i�O�̂��̂Ă������c�j
|
UART1�ŃV���A���ʐM |
OAKS16-MINI�̃T���v��mini5.c
�ǂ����������Ă��������ȁ`�Ƃ��낢��l���Ă�����ł����A�܂��̓V���A���ʐM������Ă݂邱�Ƃɂ��܂����BUART0�ɐV�����R�l�N�^�����悤���ȂƎv������ł����A�莝�������������̂ŁA���K���Ă�T���v����mini5.c��UART1�p�ɕύX���Ă݂܂����B
�V���A���ʐM���x�̐ݒ�
�V���A���ʐM���x�̐ݒ�́A�]�����x���W�X�^�EUiBRG�ɂ���̂ł����Amini5.c�ɂ��Ă���R�����g��ǂނƁA
20,000,000/19,200/16 - 1
(Clock/bps/16)
- 1
�Ƃ���܂��B20,000,000��20M��CPU�N���b�N�A19,200�͓]�����x�A���Ⴀ�A���́u/16�v�͂��������Ȃ�Ȃ`�H�n�[�h�E�F�A�}�j���A����ǂ�ł��A���ӃN���b�N���g�p����悤�Ȃ��Ƃ͏����Ă���܂����A�u1/16�v�Ȃ�Ă̂͂łĂ��܂���B
�����������̂Ɗo���Ă��������̂��ȁ`�H�ƔY��ł�����ATWO LEGS�̂킽�Ȃׂ��w���v���Ă���܂��āA�茳�̃}�j���A���ł��m�F���Ă݂܂����B�]�����x���W�X�^�̂Ƃ���ɂ͏����ĂȂ��̂ł����i���������A���ꂪ�����j�A�urjj09B0033_m16chm.pdf�v��P118�̃u���b�N�}���悭����ƁA�uUiBRG�v�̑O�ɁA�u1/16�v�Ə����Ă��锠������̂����܂����B�����āA���ɁIP133�Ɂufj/16(n+1)�v�̌v�Z�����������̂ł��B�ӂ��ӂ��ӂ��B��ςł����B�����ƁA�킽�Ȃׂ���̏������݂�������A�ꐶ�A�u�����������v�Ƃ�����߂Ă����ɈႢ�Ȃ��ł��B
�悵�A����ŁA�uu0mr�v�Ƃ����uu1mr�v�ɕύX����n�j�I�iUART0��UART1�́A���Ԃ��@�\�j
�����ȒP�ɂ͂����܂���ł����B
���荞�݃x�N�^�e�[�u���H�H�H
mini5.c�Ƃ����T���v���A��M�Ɋ��荞�݂��g���Ă���̂ł����A����̃e�[�u�������������Ȃ��Ƃ����Ȃ��悤�ł��BGDL���g���Ă���ƁA���̂�����A���ɂ��C�ɂ��܂���ł����B�u���Ⴀ�Ȃ��C���t�������H�v�Ƃ����܂��ƁA�܂��A�\�[�X�t�@�C���߂Ă��āA�u����receive()���Ċ��A���荞�݊��݂��������ǁA�}�C�R���͂ǂ�����Ă��̊��̈ʒu��m��낤�H�H�H�v�Ǝv���n�߂܂����B�����āA���Ƃ́ugrep�v�U���B�ŁA�usect30.inc�v�ɏ����Ă���̂����܂��āA���̃T���v�����m�F���Ċm�M���܂����B
���{�b�g���n�߂̍��A������ƏH���d�q�ň����Ă���R���p�C����G�������ɁA����Ȃ悤�Ȃ��Ƃ��������悤�ȋC�����܂����B�Ƃ����킯�ŁA�usect30.inc�v�ɏ����Ă���
.lword dummy_int ; uart2 receive(for user)(vector 16)
.lword dummy_int ; uart0 transmit(for user)(vector 17)
.glb _receive ;
.lword _receive ; uart0 receive(for user)(vector 18)
.lword dummy_int ; uart1 transmit(for user)(vector 19)
.lword dummy_int ; uart1 receive(for user)(vector 20)
����Ȃӂ��ɏC�����܂��B .lword dummy_int ; uart2 receive(for user)(vector 16)
.lword dummy_int ; uart0 transmit(for user)(vector 17)
.lword dummy_int ; uart0 receive(for user)(vector 18)
.lword dummy_int ; uart1 transmit(for user)(vector 19)
.glb _receive ;
.lword _receive ; uart1 receive(for user)(vector 20)
����ɂ���āAM16�}�C�R���́Areceive()�Ƃ��������AUART1�̎�M���荞�݂ɂȂ��Ă��邱�Ƃ�m��킯�ł��B�usect30.inc�v�߂Ă�����A��ʂ�̊��荞�݂������Ă���܂��̂ŁA�K�v�ɉ����ď���������K�v������܂��ˁB
�悭�l���Ă݂�ƁA������āA�}�C�R���v���O���~���O�����Ă�����������܂��̂����Ȃ�ł���ˁH���`�ށB���₢��A�����������I
|
OAKS16-MINI�Ŋ��荞�ݖ����V���A���ʐM |
�����A�ĂāH
�ĂĂ��ȁ`�B��T�̏o������A���Ă��Ă���A���q���C�}�C�`�B�݂Ȃ���͂����C�ł����H
OAKS16-MINI�A���������A�V���A���ʐM�ł��B�V�������̂����̂́A���Ɋy�����ł��B�ł��A�I�[�N�X�d�q����A���������N�ł���肻���Ȃ��̂́A�T���v�����C�u�����݂����Ȍ`�ŗp�ӂ��Ă����������A�悭�����Ǝv���܂��i�Ђ���Ƃ��āA��������H�H�H�j���ꂩ�̔����Ă���Ƃ��c�ŋ߁AOAKS16-MINI����舵���Ă���A�`���[���[����Ƃ��Ƃ��ł���Ă���Ȃ����Ȃ��`�B
�V���A���ʐM�̏��������@
�Ƃ����킯�ŁA�܂��͏��������[�`���ł��B����̖ڕW�́A���荞�ݖ����A�ʐM���x��2400�A4800�A9600�A19200�A38400�A57600���T�|�[�g���邱�Ƃł��B�ŏ���9600bps���炢�܂łł������Ȃ��Ďv������ł����AKO�̃V���A�������@��2400bps�݂����Ȃ̂ŁA������ł���悤�ɂ��Ă݂܂����B
����ł́A����̎��ŁA�]�����x���W�X�^�ɃZ�b�g����l���v�Z���Ă݂܂��i�l�̌ܓ����Ă܂��j�B
���́A�i20,000,000/���x/16-1�j�ł��ˁB
57600 = 21
38400 = 32
19200 = 64
9600 = 129
4800 = 259
2400 = 520
���ށB4800bps��2400bps��255���I�[�o�[���Ă��܂��܂����B�]�����x���W�X�^�iUiBRG�j�́A�W�r�b�g�ł�����A�Z�b�g�ł��܂���B���`��B�ǂ����܂��傤�B�Ă������������M���䃌�W�X�^�iUiC0�j�ŁAf1sio���g�p���Ă���̂��Af8sio�ɂ���A�����1/8�ɂȂ�܂�����A�����OK�ł��B
�Ƃ����킯�ŁA4800�A2400bps�̏ꍇ�́A����Ȏ��ɂȂ�܂��B
20,000,000/���x/16/8-1�@�if8sio���g�p����j
�ł��A����̓v���O�����Ő�ւ��邱�Ƃɂ��܂��B�Ƃ����킯�ŁA�܂��́A�]�����x���`���܂��B���łɁAGDL�Ɋ���Ă��܂��Ă���̂ŁA_BYTE��_WORD����`���Ă��܂��܂����B
typedef unsigned short _WORD;
typedef unsigned char _BYTE;
typedef enum {
BPS2400 = 521,
BPS4800 = 260,
BPS9600 = 130,
BPS19200 = 65,
BPS38400 = 33,
BPS57600 = 22
} RSCbps;
�͂��ƁA�uH8/3664�̎��݂����ɁAchar������unsigned�Ƃ��Ńn�}�邱�Ƃ͖������낤���H�v�ƐS�z�ɂȂ�܂����B�ǂ����\���I���ł��BM16��unsigned�݂����ł��B�܁A�ł��A�킩���Ă������܂łȂ̂ŁA�C����蒼���āA�����������������[�`���ł��B�|�C���g�́A�n���ꂽ�l���`�F�b�N���āAf1sio��f8sio���Đݒ肷��悤�ɂ��Ă݂܂����B
void RSCinit( RSCbps tBps )
{
u1mr = 0x05; // ����M���|�h���W�X�^ �����N���b�N�A���A
// 8�r�b�g�A�p���e�B�Ȃ��A�X���[�v�Ȃ�
if( tBps > 0xFF ){
u1c0 = 0x11; // ����M���䃌�W�X�^ �N���b�N��f8SIO
u1brg = (_BYTE)( tBps/8 - 1 ); // CLK��1/8�ɂȂ�̂ŁABRG��1/8�ɂ���B
}
else{
u1c0 = 0x10; // ����M���䃌�W�X�^ �N���b�N��f1SIO
u1brg = (_BYTE)( tBps - 1 ); // �]�����x���W�X�^
}
u1c1 = 0x05; // ����M���䃌�W�X�^�P ����M����
}
���M����
���M�́Amini5.c���ƁA�����Ȃ著�M�o�b�t�@���W�X�^�ɂ���Ă܂��āA���\�����Ȋ����ł��̂ŁA����́A�W�F���g���}���ɁA�����Ƒ��M�\���ǂ������`�F�b�N���Ă��瑗�M�o�b�t�@���W�X�^�ɓ���邱�Ƃɂ��܂��B�������A�����Ńn�^�ƍ������B
�Q�A�����Ӗ��Ǝv����t���O�����݂��܂��B
����M���䃌�W�X�^�O�́u���M���W�X�^��t���O�iUiC0/TXEPT�j�v�ƁA����M���䃌�W�X�^�P�́u���M�o�b�t�@��t���O�iUiC1/TI�j�v�́A�������͈Ⴄ�̂ł����A�ǂ���瓮��͓����悤�ł��B�����A���荞�ݗv���Ƃ��Ďw��ł���̂�TXEPT�̕��݂����Ȃ̂ŁA�������̕����R���������̂�������܂���B�����ɁA��������Ă݂��̂ł����A�ǂ�������ʂ͓����ł����B
void RSCsend( _BYTE bData )
{
while( ti_u1c1 == 0 ); // ti_u1c1��1�ɂȂ�܂Łi�o�b�t�@����j�҂�
u1tb = (_WORD)bData; // ���M�o�b�t�@���W�X�^�ɃZ�b�g
}
��M����
��ł́A��M�����̕��A�s���Ă݂����Ǝv���܂��Bmini5.c�ł́A���荞�݂��g���Ď�M���������Ă��܂������A����́A�u���荞�݂��g��Ȃ��v�̂��ړI�Ȃ̂ŁA��͂�A���W�X�^�ŏ�ԃ`�F�b�N�����Ď�M�o�b�t�@���W�X�^����f�[�^�����o���悤�ɂ��܂��B
����ɂ͑���M���W�X�^�P�́u��M�����t���O�iUiC1/RI�j�v���`�F�b�N���Ă�������݂����ł��B�Ƃ����킯��
_BYTE RSCrecv( void )
{
_WORD wData;
while( ri_u1c1 == 0 ); // ��M������1�ɂȂ�܂ő҂�
wData = u1rb; // ��M�o�b�t�@������o���B
return((_BYTE)( wData & 0xFF ));
}
�ӂށB�����OK���Ċ����ł��B����A�o�b�t�@�`�F�b�N�́A���ꂼ��̏������ɏ����Ă��܂����A������A�`�F�b�N���[�`���Ƃ��ēƗ�������Ɓu��M�҂������ɁA�f�[�^�����鎞������M����v�Ƃ����������ł��܂��BSIPHA CORE�ł��A����M�����Ƃ��A���̂悤�Ȏg���������Ă��܂��B
����Ȃ�ł����̂��ȁH�H�H�Ԉ���Ă��狳���Ă��������ˁ`�B
�ŁA���̌�A�܂��������̂悭�킩��Ȃ����Ƀu�`������̂ł������B���`��B�܂�����B
����A�����M��RSCputs( char* )�Ȃ�Ă̂�����ĂˁARSCputs("abc....")���ď����Ă݂���R���p�C���Ōx���ifar pointer (implicitly) casted by near pointer�j���ł��ł���B��ŁA�悭�킩��Ȃ���ŁARSCputs( const char* )�ɂ��Ă���o�Ȃ��Ȃ�����ł����A�[���ɕ\�������͂��̃f�[�^���\������Ȃ��킯�ł��B���`�ށB���݁A�������ł��B
|
���EOAKS16-MINI�Ŋ��荞�ݖ����V���A���ʐM |
���M��������
�O��A�V���A���ʐM�̑��M�����ŁA�u�Q�A�����Ӗ��Ǝv����t���O�����݂��܂��B�v�Ƃ������Ƃ������܂������A���J�g����p�̂ق肳��̏����ł���Ɨ����ł��܂����B�v���O����������݂�ƁA�u���M���W�X�^�v�̎�O�Ɂu���M�o�b�t�@���W�X�^�v�����݂���Ƃ������Ƃł��B
�n�[�h�E�F�A�}�j���A���irjj09B0033_m16chm.pdf�j�́u�}13.2 UARTi ����M���u���b�N�}�v���悭����ƁA�uUiTB�i���M�o�b�t�@���W�X�^�j�v����u���M���W�X�^�v�f�[�^���]������A��������f�[�^�����M����Ă���}��`���Ă���܂��B�܂�A���M�����́A�v���O��������u���M�o�b�t�@���W�X�^�v�Ƀf�[�^���������݁A���ꂪ�u���M���W�X�^�v�ɓ]������A��������V���A��������đ��M�����킯�ł��ˁI
����Ȃ킯�ŁA����M���䃌�W�X�^�O�́u���M���W�X�^��t���O�iUiC0/TXEPT�j�v�́A���ۂɃf�[�^�����S�ɑ��肫�����ꍇ�Ƀt���O���Z�b�g����A����M���䃌�W�X�^�P�́u���M�o�b�t�@��t���O�iUiC1/TI�j�v�́A�u���M�o�b�t�@���W�X�^���瑗�M���W�X�^�Ƀf�[�^���]�����ꂽ���v�ɃZ�b�g�����Ƃ������Ƃ݂����ł��B�}�ŏ����ƁA���̂悤�Ȋ����ł��傤���B
| �v���O���� ���� |
���M�o�b�t�@ |
���M ���W�X�^ |
UiC1/ TI |
UiC0/ TXEPT |
���� | |
| Step 1 | 'A'�𑗐M | �| | �| | �P | �P | �v���O�����ŁA'A'�𑗐M���鏈���J�n |
| Step 2 | �| | 'A' | �| | �O | �P | ���M�o�b�t�@���W�X�^��'A'���Z�b�g |
| Step 3 | �| | �| | 'A' | �P | �O | ���M���W�X�^�ɁA�]������đ��M�J�n�B |
| Step 4 | �| | �| | �| | �P | �P | ���M���������W�X�^���� |
����Ȃ킯�ŁA�uUiC1/TI�v���`�F�b�N���đ��M�o�b�t�@���W�X�^�Ƀf�[�^��ݒ肷��ƁA�u�f�[�^�͑����Ă���Ƃ͌���Ȃ����ǁA�v���O��������݂���A�V�f�[�^��ݒ肵�Ă����^�C�~���O�v�Őݒ肷�邱�ƂɂȂ�A�uUiC0/TXEPT�v���`�F�b�N���đ��M�o�b�t�@���W�X�^�Ƀf�[�^��ݒ肷��ƁA�u���S�Ƀf�[�^�𑗂肫������̃^�C�~���O�v�Őݒ肷�邱�ƂɂȂ�܂��ˁB
���ہA���M���W�X�^����ł���AStep 2����Step 3�͈�u���Ǝv���܂����A�v���O�����ł̃t���O�`�F�b�N���A�V���A���ʐM���x���猩������Ƒ����̂ŁA��Ԋm�������ȁuUiC0/TXEPT�v�ł̃`�F�b�N�ő��M����悤�ɂ��悤�Ǝv���܂��B�Ȃ�ƂȂ����������Ȃ��̂ł����A�x�[�V�b�N�Ȃ��̂Ƃ��Ă͗ǂ������ł��B�����M�Ƃ��ŃX�s�[�h���C�ɂȂ邱�Ƃ���������A�A���f�[�^���M�p�ɕʓr�p�ӂ���������Ǝv���܂��B�Ƃ����킯�ŁA���荞�ݖ����̑��M�����́A
void RSCsend( _BYTE bData )
{
while( txept_u1c0 == 0 ); // txept_u1c0��1�ɂȂ�܂Łi���M���W�X�^����j�҂�
u1tb = (_WORD)bData; // ���M�o�b�t�@���W�X�^�ɃZ�b�g
}
�Ƃ��Ă������Ƃɂ��܂��B
�ƁA�����Ă�����ATWO LEGS�̂킽�Ȃׂ�����t�H���[�̋L�����c�݂Ȃ���A���肪�Ƃ��������܂��`�B
|
near��far�|�C���^ |
2004/09/06��TOPIC�̍Ō�Ƀ{�\�{�\���Ə������A�u���ɕ������n���̂Ɍx�����o�āA�������̉ʂĂɓn����Ă��Ȃ��͗l�v�݂����Șb�ł����A�����ɉ������ĂȂ������肵�܂��B���Ԃ�A�R���p�C���̃N�Z���Ǝv����ŁA��������Α�����ł��傤���ǁc�B
�Ƃ����킯�ŁA������ƃV���v���ȃR�[�h������Ă݂܂����B�f�o�b�K�O��Ȃ̂ŁA�V���A���o�͏����͂��Ă��܂���B
#include "sfr26.h"
void main( void );
void strCopy( char* szDest, char* szSrc );
char szWorkG[32];
void strCopy( char* szDest, char* szSrc )
{
int nCnt;
for( nCnt = 0; szSrc[nCnt] != '\0'; nCnt++ ){
szDest[nCnt] = szSrc[nCnt];
}
szDest[nCnt] = '\0';
}
void main( void )
{
char szWorkL[32];
strCopy( szWorkG, "ABC" );
strCopy( szWorkL, "ABC" );
strCopy( szWorkG, szWorkL );
while( 1 );
}
������R���p�C������ƁA����ɂ��A
[Warning(ccom):StringSetTest.c,line 21] far pointer (implicitly) casted by near pointer
===> strCopy( szWorkG, "ABC" );
[Warning(ccom):StringSetTest.c,line 22] far pointer (implicitly) casted by near pointer
===> strCopy( szWorkL, "ABC" );
�Ƃ����܂��B����ɁA�f�o�b�K�œ����ǂ������Ă݂�ƁA�v�����悤�Ȓl��strCopy()��szSrc�ɓ����ĂȂ��悤�ł��B�x����ǂނƁA�Ȃ�near pointer�̂Ƃ���ɁAfar pointer��������Ă��܂����悤�ł��B����near��far�A����Łu�߂��v�Ɓu�����v�Ƃ����Ӗ��łȂ�̂��Ƃ��H�ł����A���̓|�C���^�i�f�[�^����̃A�h���X���w���ϐ��j�ɂ͂Q��ނ���悤�ŁAnear�͂Q�o�C�g - FFFF�̃A�h���X��Ԃ��w����Afar�͂S�o�C�g�����ǎ��͂R�o�C�g�� 0 - FFFFFF�̃A�h���X��Ԃ��w����|�C���^�ɂȂ�܂��i�킽�Ȃׂ���A�������肪�Ƃ��������܂����j�B�ŁA�n�[�h�E�F�A�}�j���A����ǂނƁARAM�͑O�̕��AROM�͌��̕��ɂ����āAROM��far pointer�Ȃ悤�ł��B���āARAM�͑O�̕��Ȃ̂�near pointer�ɂȂ�ƁB
������R�[�h�ňӎ�����ƂȂ�ƁA���\�A��ςȋC������̂ł����A�݂Ȃ���ǂ�����Ă����ł��傤���H�Ⴆ�Astrcpy()�̃R�s�[�����āA"ABC"�Ɠn��������������A�������ҏW���ēn���iRAM��̕ϐ��j���Ƃ�����킯�ł��B�ǂ������炢����ł��傤�H�Y�������A�R���p�C���I�v�V�����������Ă݂邱�Ƃɂ��܂����B
-ffar_RAM
�uRAM�f�[�^�̃f�t�H���g������far�ɂ��܂��B�v�Ƃ����I�v�V�����ł��B�Ӗ����ǂ��킩��܂��A������ۂ��̂ŁA�����Ă݂邱�Ƃɂ��܂����B�ǂ������TM��ŃR���p�C���I�v�V������ς���̂��A�킩��Ȃ������̂ŁAmake�t�@�C���i�`.tmk�j��CFLAGS�̍s�ڕҏW���܂����B
���r���h�`�I
�����A�[�����Ȃ��̕ύX�������́A���͂Ƃ����ꃊ�r���h���܂��傤�B
StringSetTest.c 21 Warning (ln30): .\StringSetTest.r30 : '_szWorkG' value exceed 0FFFFFH
StringSetTest.c 21 Warning (ln30): .\StringSetTest.r30 : '_szWorkG' value exceed 0FFFFFH
StringSetTest.c 23 Warning (ln30): .\StringSetTest.r30 : '_szWorkG' value exceed 0FFFFFH
StringSetTest.c 23 Warning (ln30): .\StringSetTest.r30 : '_szWorkG' value exceed 0FFFFFH
Warning (ln30): .\StringSetTest.r30 : 'bss_FE' data exceed 0FFFFFH
���A�܂�������Ȃ��̂��c�B0FFFFFH���z���Ă��那�H�H�H���`�ށA�ȂႤ���ۂ��c�B
|
near��far�|�C���^�A���ς�炸�Y��ł��܂����c |
���낢��l���Ă�����ł����A�ȂA���{�I�ɗ������Ȃ��Ƃ����Ȃ�����������i�悤�͒m��Ȃ��R�g������j�悤�ȋC�����Ă��܂����B�Ƃ����킯�ŁA�I�[�N�X�d�q�������A�b�v����Ă���A���K�p�e�L�X�g��ǂݎn�߂܂����B����OAKS16�v���O���~���O�e�L�X�g�̕���ǂ�ł��܂��B�ӂނӂށBNC30���Ǘ�����Z�N�V�������E�����炩��B���͂Ƃ�����A���i�N�Z�Ƃ����蕶��j���o���Ċ���Ȃ��ƂˁI
�Ƃ���ŁA�f�o�b�K�Ńf�o�b�O����̂��āA�t���b�V��ROM�̏������݉ɃJ�E���g�����̂��ȁH�f�p�ȋ^��ł��B
|
near��far�|�C���^�A���悢��������ȁH�f�o�b�K�ŕϐ��`�F�b�N |
_far�ł���A_far
�����݂��킳������̃q���g�A�킽�Ȃׂ�������̏�������A"_far"�Ȃ���̂��K�v�ł́H�Ƃ������Ƃ��킩���Ă����������̍��ł����A�n�^�Ǝv�������Ƃ�����܂����B
�u�W�����͂ǂ̂悤�ɒ�`����Ă���낤�H�v
NC30�́A�W�������C�u�������p�ӂ���Ă���̂ŁA���̃w�b�_��`���Ă݂邱�ƂɁB�T���Ă݂�ƁuMTOOLS\INC30�v�Ƀw�b�_�������Ă��܂����B
char _far * strcpy(char _far *s1, const char _far *s2); |
���A�����ɂ��������Ă���ł͂Ȃ����c�B��ɁA���������Ƃ��납��`�F�b�N����悩�����c�B�݂Ȃ���A�����܂���B�킽�Ȃׂ���̂�����悤�ɁA"far"�́A"_far"�Ȃ�ł��ˁB���ނ��ށB�Ƃ����킯�ŁA�錾���C���i���łɃw�b�_�t�@�C���ɏ����Ă���悤�ɁA�ϐ����������Ȃ��^�C�v�ɏC���j���āA���̂̕����C�����āc�ƁB
void strCopy( char _far *, const char _far * );
:
void strCopy( char _far *szDest, const char _far *szSrc )
{
: |
��т�ǁ`�I
�قƂ�ǎ����̂悤�Ɂc
���A�r���h�ł��܂����B
�悵�A�f�o�b�K�Ŋm�F���IstrCopy()���Ăяo���Ă���Ƃ���Ńu���[�N�|�C���g���d�|����
�u�肹���Ƃ悧�������A�����������I���Ă��ՁA���Ă��ՁA���Ă��`���Ղ������I�v
���A�����ł��ˁB�����ƃf�[�^���ݒ肳���悤�ɂȂ�܂����B�悵�A����ł܂�����A���̊��֓���݂܂����B�Ƃ����킯�ŁA�����́A�V���A���ʐM�v���O�����ɖ߂邱�Ƃɂ��܂��B
�݂Ȃ���A�ǂ������w�삠�肪�Ƃ��������܂��`�I
�Ƃ����킯�Ńf�o�b�O�̂����E�ϐ����e�`�F�b�N
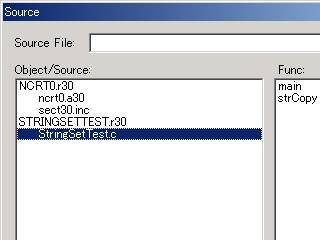
�ƁA���ł���l�q�����`�����邾���ł́A�\����Ȃ��̂ŁA�f�o�b�O���@�ɂ��Ă̂��b�ł��B�f�o�b�K���N������ƁA�܂��AProgram
Window�Ƃ�����ʂ��o�Ă��܂��B���̉�ʂŁA�uView�v�{�^���������ƁA�\������\�[�X�t�@�C���̎w������邱�Ƃ��ł��܂��B
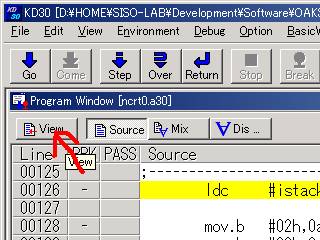
�͂��A�����ŁA�\������\�[�X�t�@�C�����w�肵�܂��B
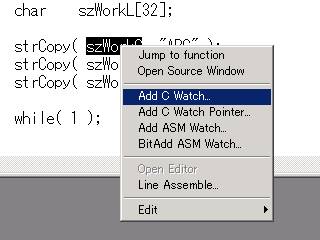
�ŁA�\�[�X�t�@�C�����\�����ꂽ�Ƃ���ŁA�ϐ���I����Ԃɂ��āA�E�N���b�N���j���[��\�����A�uAdd C Watch...�v��I������ƁA�uC Watch Window�v���J���A�ϐ����lj�����܂��B�������A�uC Watch Window�v�����炩���ߊJ���Ă����āA�uAdd�v����ŊJ���Ă��\���܂���B
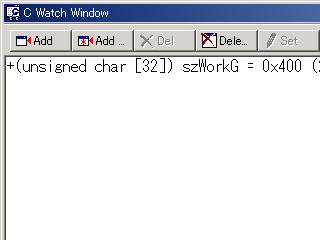
�u������f�[�^����킩��Ȃ��`�v���Ă��Ƃ͂���܂���B���́uC Watch Window�v�ŕϐ���I�����ă_�u���N���b�N����ƁA���g�����邱�Ƃ��ł��܂��B�悭�ł��Ă�A����B
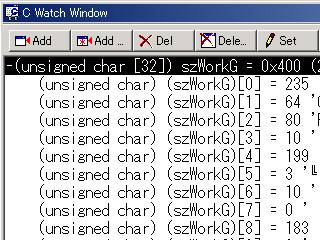
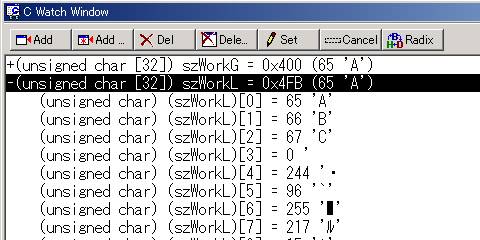
�Ƃ����킯�ŁA��قǏC�������\�[�X�R�[�h�ŁA�X�e�b�v���s���������̕ϐ��\���ł��B�v�����Ƃ���̒l�������Ă��邱�Ƃ��킩��܂��B
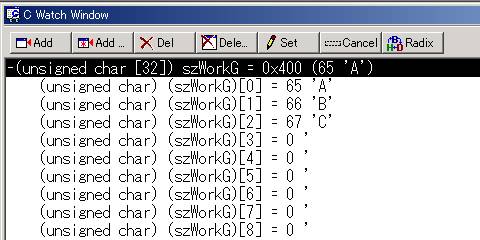
�܂��A���̂悤�ɁA�O���[�o���ȃf�[�^�����ł͂Ȃ��A���[�J���ȃf�[�^���\�����邱�Ƃ��ł��܂��B
�ӂ����A���������`�B�ł��A�̑�Ȃ�����I
|
OAKS16-MINI�Ŋ��荞�ݖ����V���A���ʐM�E���M |
���M�����A���ǂ����Ȃ�܂����B
���`�AOAKS16-MINI�l�^�������̂͋v���Ԃ�ł����A���M�o�b�t�@���W�X�^�̈Ӗ����킩��A�܂��A_far�̓䂪�킩��A�����A�r���h�����ƂȂ����̂ł����A�A�������f�[�^�i�v�͕�����j�𑗐M������A�ςȃf�[�^���o�Ă��Ă��܂��܂����B�P����������Ɩ�薳����ł����A�A�����đ���ƁA�uABCDEFG�v���A�uADF???�v�݂����Ȋ����ŁA�f�[�^����є�тɂȂ��Ă��܂��܂��B�������v���O�����́A�ȑO���������܂�������ł��B
void RSCsend( unsigned char bData )
{
while( txept_u1c0 == 0 ); // ���M���W�X�^����ɂȂ�܂ő҂�
u1tb = (_WORD)bData; // ���M�o�b�t�@���W�X�^�ɃZ�b�g
} |
��ŁA�l������ł����c���́A�u���M�o�b�t�@���W�X�^���瑗�M�o�b�t�@�ɑ��鑬�x�́A���͒������ł͂Ȃ��v�̂ł͂Ȃ����H�Ɛ������Ă��܂��B�ǂ��l���Ă݂�A���M���W�X�^����ɂȂ�������Ƃ����āA���M�o�b�t�@���W�X�^�Ƀf�[�^�˂����ނ̂͐a�m����Ȃ��ł��ˁ`�B
�Ƃ������Ƃ́A�u���M���W�X�^��t���O�iUiC0/TXEPT�j�v�ƁA����M���䃌�W�X�^�P�́u���M�o�b�t�@��t���O�iUiC1/TI�j�v�̗������`�F�b�N���Ă��̂��x�X�g�I�Ƃ������ƂɂȂ�̂ł����A�܁A�����܂ł͂������ȁH�Ƃ������ƂŁA���M�o�b�t�@���W�X�^���`�F�b�N���邾���ɂ��Ă����܂��B
void RSCsend( unsigned char bData )
{
while( ti_u1c1 == 0 ); // ���M���W�X�^����ɂȂ�܂ő҂�
u1tb = (_WORD)bData; // ���M�o�b�t�@���W�X�^�ɃZ�b�g
} |
���́Aputs()�Ƃ�gets()�Ƃ�������Ă��܂��̂ŁA���������e�X�g���ł��Ă�����A�܂Ƃ߂ăA�b�v���܂��B
�i��肾�߂��Ă����Ƃ̂��ƂƂ��A�d���Ƃ��Z�����̂������ł����A����H8/3664�̕����������Ă���̂Ői�݂��x���Ƃ����̂̓q�E�~�E�c�j