| Knowledge | ||||||
PRS-3401 Report
I-BEEさんがロボット用に発売している、すんごい小型サーボ、PRS-3401に関して、不定期TOPICでアップした内容をまとめたページです。なにかと素人表現で申し訳ないんですが、よかったら参考にしてください。
| 2005/03/27 |
初、デジタルサーボ
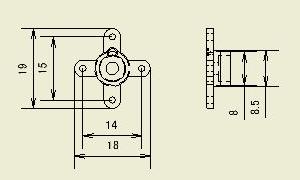
さてと、サーボホーンをばらしてみました。サーボホーンを固定しているネジは、M3です。また、この特徴のある形状をしたサーボホーンの穴位置、上下と左右で異なります。また、軸部分を良く見ると、ややテーパー上になっています。せっかくなので、さっそくINVENTOR8で書いてみました(ネジとワッシャは手抜きですが)。
採寸は、いつもながら自信ややなしですが、ご参考用ということで載せておきます。もし、ちがうぞ〜というところを発見された方がいらっしゃいましたら、連絡お願いします。 現行G-Tuneで使っているサーボホーンは、MICRO-MGのものに穴を追加して使用していいて、外径は18.6mmにして使っています。また、ネジ穴は直径2mmにしてネジ穴間は12.9mmにして使っています。PRS-3401付属のサーボホーンだと、Φ2mmまで広げてしまっても大丈夫かな〜?という感じです。やっぱ、M1.6とか使うべきなんでしょうか?みなさんはどうされているんでしょう?
| |||||||||||||||||||||
| 2005/03/30 |
PRS-3401
解析・裏フタ
写真は、裏フタを外して、同じ取り付け高さ位置に手で固定して写真をとったものです。 ちなみに裏フタの底部分の厚さは、1.1mmで、モーターの下に当たる部分はえぐってあって、0.5mmぐらいです。 そんなわけで、PRS-3401の外形、もともとかなり薄型なので、素直に反対軸用に板材を用意して作る方が良さそうです。 他のアイデアとしては…写真見てもらえればわかると思いますが、裏フタ、かなり薄く、ケース装着時寸法3.6mm程度です。 ということは…これぐらいの厚みのABSとかならば入手性がいいので、CNCが使えたら、反対軸付きオリジナル裏フタも作れそうです。 そこまで考えて設計されたものかどうかわからないですが、ホビーストにはうれしい設計だと思います。 追記) と思っていたら、MOONのNEWLIGHTさんが既にやられていました。うぅ、すばらしい!
| |||||||||||||||||||||
| 2005/03/31 |
ミミ穴は4mm
というわけで、手元にあったブッシュをはめてみました。このブッシュは、広杉計器で購入したもので、M3のネジを通すのにちょうどいいものです。 写真だとちょっとわかりにくいのですが、完全にはまっていません。このブッシュ、傘の外径が6mmでちょっとだけサーボボディにあたり、 かっちりと入りません。そんなわけで、ブッシュの傘の部分をちょっと削るとしっかり入ります。傘の外径が5.5mmのものがあればばっちりですが…。 型番は、外径6mmのものがD3040-6120、5mmぐらいのものは…う〜ん、ちょうどいいのがないです。残念。もうちょっと探してみることにします。 他の方法としては、外径4mmのスペーサがM2のネジにちょうどよくはまるので(内径2.1mmぐらい)、長さ2mmのスペーサとワッシャ、それにM2のネジを組み合わせる方法が使えそうです。これならM3ネジを使わなくていいので、軽量化にもなりそうですね!
| |||||||||||||||||||||
| 2005/04/17 |
サーボを「うにうに」とさわり比べる 計測?条件ですが、電源はどれも7.2Vを安定化電源から供給し、一定のパルスを入力し続けておいて手でうにうにします。さすがにサーボホーンを手でうにうにしてもさっぱりわからないので、ABS(4mm厚)の板をつけてうにうにします。後で動画中に出てきますが、この板の長さは軸から先端のとがっている部分までが10cmです。これで大雑把に保持力とか、動きの特性とかがわかるってわけです(ほんとかな?)。その他、トルク測定とかも一応してみたんですが、そっちは後日アップします。 現行G-Tuneが、MICRO-MG+S03Tで動いているわけですが、それをPRS-3401に移行するにあたり、どんなところを気をつけないといけないかな〜とか、どんな特性の差があるかな〜という自分用にチェックしたものですので、あくまでもご参考用に、ということでお願いいたします。
MICRO-MGをうにうに S03Tをうにうに PRS-3401をうにうに というわけで、うにうにレポート、みなさまの参考になるでしょうか?ぐぐっと押したときに押し戻される力はPRS-3401の方が強いかな?ぐらいな感じですが、こうやってうにうにしてみるとPRS-3401、やっぱ違いますね〜(値段も相当違いますが)。ロボットの場合、このあたりの繊細な動きがしっかりしているとコントロールしやすいので、今後、楽しみです。
| |||||||||||||||||||||
| 2005/04/18 |
いちおうトルクも測ってみました。 さて、計測方法ですが、一応、以下のような感じでやってみました。
他の方のテストを見ると、重りをぶら下げてやっている方もいますよね。あの方が正しいんでしょうか。 まあ、今回は、比較が目的なので、これでよしとします。このテストの結論としては、PRS-3201は、MICRO-MG、S03T、どちらとも置き換え可能でパワーアップの見込みあり、といえます。 また、先日の「うにうに比較」によりPRS-3201の方が、より繊細に動かせるというのもわかりました。というわけで、次期G-Tuneは、全部PRS-3401で行くことにします。 気づいたこと デジタルサーボは保持し続けると聞いていたので、これはありがたいです。
| |||||||||||||||||||||
SISO-LAB Knowledge