G-Tuneの脚間接について
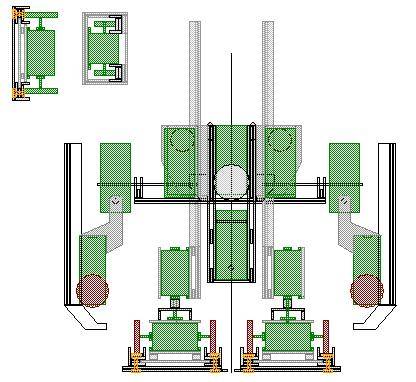
G-Tuneの脚関節をどのように実装しているか、ちょっとまとめてました。ベアリングとかは使用せず、結構、お安く実現しています。精度もそれなりですけど(笑)。サーボの反対側の軸受けにも使える方法だと思いますので、よろしかったら見てみてください。実際、同じ方法で、G-Tuneの腰部分の両軸を実現しています。
TOPにあるINFORMATIONもずいぶん長くなってきたので、そろそろ整理したいです。そういえば、このSISO-LAB不定期TOPICもずいぶんと長くなってきました。そろそろ月別とかにわけたほうがいいですか?
G-Tuneで使用しているプロポとレシーバ
 G-Tuneはラジコン操作
G-Tuneはラジコン操作
G-Tuneは、リモート操作のためにラジコンシステムを使用しています。ロボットで使えるラジコンシステムについて、とみやまさん(BROKEN's Advanced
Vehicle
Laboratory)がホームページにてロボットに使えるラジコン送受信機についていろいろ調査結果を公開されていましたので、BBSにて、こちらで使用している機器や方法を書き込みましたら、なんと、使用例として私の構成を載せてくださいました!(感激) せっかくですので、どのように使っているか解説したいと思います。でも、メーカ保証外になると思いますので、もっといい機材の買える方にはお勧めしません。あくまでもご参考裏技ということで、同じことをやられる場合は、気をつけてやってください。
プロポ
フタバのSKY SPORT 4
(T4VF)を使用しています。4chのFMで、40MHzと72MHzがありますが、40MHzの方を使用しています。名前の通り、空用のものですので、デフォルトでは空用のクリスタルしかセット購入できないようです。これを選んだ理由は、「4chで一番安いプロポ」だからです。なんと単品価格\4000-です。購入先は、G-Tuneのショップリストにもありますが、フタバ産業株式会社さんです。でも、もし「6chで同じぐらい安いプロポ」があったら、そちらを買っていたと思います(笑)。
これに、フタバの地上用のクリスタル(セットで\1750-)を無造作に挿して使っています。今のところ、不具合らしきものは起きていません。
注意点としては、空用はみんなそうなのかどうかは知りませんが、右スティックの縦方向にはスプリングが入ってなくて、センターには自動復帰しません。G-Tuneでは、逆にこれを利用して「モードセレクタ」としてます。ちなみに上は「歩行」、真中は「格闘」、下は「しゃがみ移動」です。
 レシーバ
レシーバ
さてレシーバは、やっぱ小型軽量がよかったので、GWSのGWR-4Pを使用しています。これも結構安く、\3600でした。もう少し出せば6chのものもあるようです。このレシーバは、飛行機用のようで超小型軽量です。ただし、クリスタルは専用の小型サイズのものが必要になります。フタバ用のものはやっぱ、空用しか発売されていません。そういうわけで「いいや、つけちゃえ」と、無理やりつけてしまいました。
まず、レシーバのクリスタルをつける端子から線を引き出します。メス端子ですので、何かちょうどいいものがないか探してみると、「丸ピンICソケット・両端オスピン」の細いほうが比較的よさげで、これを使いました。そのままつけると長すぎるので少しカットしています。これに電線をつけます(もちろん太いほうにですよ)。いいか悪いかわからないのですがシールド線を使っています。これで、レシーバからクリスタル用の線が引き出せました。下の写真で、右手前部分が引き出しているところです。
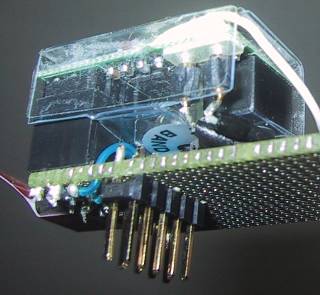 次に、フタバのクリスタルを挿すほうですが、きっと秋葉原とかに行けば、それ用のものが手に入るのでしょうが、残念ながら、我が家の近くにはそういった場所がありません。で、目に付いたのがピンヘッダ用の3Pのコネクタです。穴の間隔がフタバのクリスタルにぴったりです。でも足が太い。そんなわけで、コネクタを作るときに、あらかじめケースに入るぎりぎりまでメス側の金具を広げておいて組みます。これを基板に接着してできあがりです。ついでにこの基板に3x4※分のピンコネクタをつければ、レシーバユニットのできあがりです。電源の供給は、この3x4のピンから行います。その辺は、GWR-4Pのケースに書いてありますので確認してください。ちなみにピンはケース上面内側から、「サーボ信号」、「+」、「−」となっています。電源は、「+」、「−」に接続します。私はマイコン電源の5Vを入れてます。最後に「サーボ信号」をマイコンに接続します。
次に、フタバのクリスタルを挿すほうですが、きっと秋葉原とかに行けば、それ用のものが手に入るのでしょうが、残念ながら、我が家の近くにはそういった場所がありません。で、目に付いたのがピンヘッダ用の3Pのコネクタです。穴の間隔がフタバのクリスタルにぴったりです。でも足が太い。そんなわけで、コネクタを作るときに、あらかじめケースに入るぎりぎりまでメス側の金具を広げておいて組みます。これを基板に接着してできあがりです。ついでにこの基板に3x4※分のピンコネクタをつければ、レシーバユニットのできあがりです。電源の供給は、この3x4のピンから行います。その辺は、GWR-4Pのケースに書いてありますので確認してください。ちなみにピンはケース上面内側から、「サーボ信号」、「+」、「−」となっています。電源は、「+」、「−」に接続します。私はマイコン電源の5Vを入れてます。最後に「サーボ信号」をマイコンに接続します。
※3x4というのは、サーボコネクタが1つあたり3P、これが4ch分ということです。2列のピンコネクタを切って作りました。
この手の情報は、もう少したまったら、そのうちG-Tuneの方にまとめておきますね。結構、手持ちの入手性のいい部品のみでやっていますが、もっといい部品を入手できる方はその方がいいと思いますので、チャレンジする前に、一度調査されることをお勧めします。
そうそう、書くのを忘れましたが、なぜ、ラジコンシステムを選んだか?理由は、以下の通りです。
■たくさんのデータを送るつもりが無かった。
■受信機がとても小型で低消費電力(たぶん)。
■安いのを見つけた。
■子供のころからの憧れで多チャンネルのプロポを一度買ってみたかった。
■以前のROBO-ONEでデータ通信系の無線トラブルが多発しているようであった。
■値段の割に信頼性が高そうだった。(歴史ありますし、一応、100m以上離れていてもコントロールできることになりますから)
■他のデータ転送機器同様、マイコンに簡単に接続できる。
■サーボ購入時、サーボ動作テストができる。
ご参考までに、という感じです。
今日はひさしびさに会社へ行った。エアコンが効いてた。
G-Tuneソフトウェアアップ
昨日書きかけだったG-Tuneのソフトウェア、一応完成です。ハードウェアにしろソフトウェアにしろ、もし質問等ありましたらBBSの方へお願いいたします。がんばって回答、改定してみたいと思います。これまた勉強です。
G-Tuneお披露目会
今日は、久しぶりに会社に出社しました(どういうこっちゃ???)。仕事が終わってから、お友達を集めてG-Tuneのデモンストレーション。サービスで、プロポ操作もさせてあげました。なかなか、みなさん、興味深げに見ていただきまして、やる気アップ。一通り、見せようと思っていた人には見せたような気がするので、そろそろ、本格的に次回へ向けての活動を開始しようと思います。
歩行処理の改良
実はお披露目会前に、こっそりと直したデータがあります。それは歩行データです。少しでも美しくスムーズな歩行を目指すため、現状の歩行を見直しました。やっぱりまっすぐ歩きたいですからね。ムービーチェックはいいですね〜。A-Doの菅原さんが予選動画をUPしてくださったので(真横からアップで!)、G-Tuneの歩行を再生してチェックしていたのですが、本当によく動きがわかります。また、なんで本物を見ているとわからないのかという理由もわかりました。それは・・・
どきどきはらはらして、目を閉じて祈ってしまう。
からです。目を閉じるから見えないのです。やっぱり真実を見極めるためには、目をしっかりと開いて見なければなりません。これがムービーになると、何度歩いているところを見ても絶対に壊れないという安心感から、しっかりみることができるんですね。すごい発見をしてしまいました。
さて歩行の方ですが、「ぎっこんばったん」です。なんでこんなにぎっこんばったんと動くのかとよく見ていたら、足首のピッチ軸(実はG-Tuneでは膝と呼んでいるんですが)の動作がためまくったあげく、一気に動いています。それですごく「ぎっこんばったん」のようです。ちなみに、脚の長さは20cm以上、軸間6cm、これを非力で華奢な小型アナログサーボで動かしているわけですから、そもそも歩いていることの方が不思議なのかもしれません。うーむ、よく歩いている。非常に興味深い事実です…。おっと横道にそれそう。
さて、これをなんとかするアイデアですが、正当には…
■軸間を短くしてもっと力が出せるようにする。
■デジタルサーボにする(初期動作遅れ改善に期待)。
■パワーのあるサーボにする(できればやりたくない。理由は…)。
■アナログサーボの初期動作後れを見込んだ指示をする。
■歩幅を小さくする。
などがあると思います。簡単なところで、歩幅を小さくしてみました(4cm→3cm)。結果はいまいち。しかし、自分で歩いているうちに、前後の歩幅について、体から見た場合、同じでないような気がしてきました。なんとなく、前足の方にいつも身体が寄っている気がするんです。今まで、G-Tuneは、前後に2cmずつ、同じ幅だけ開いていたんですが、前を1cm、後を2cmにしたらどうなるだろう?と思いまして、試しにやってみたところ、おお、いいではないですか!かなりまっすぐ歩きます。足首ピッチ軸サーボが直立の状態に近くなりますので、当然パワーはかけやすくなるのですが、それ以上になんか身体がブレないんです。試しに、前後1.5cmにもしてみましたが、やはり前者のほうがかなりいいです。G-Tuneのメカ特有のものかも知れないので、ご参考にはならないかもしれませんが、実験報告という事で。
A-Doチームのみなさま(URA-Giken)、動画アップ、本当にありがとうございました。真実に目覚めたかもしれません。自分でも動画が撮れるアイテムを何かそろえて、今後に役立てたいと思います。
今日も暑かったハードな日だ
 というわけでG-Tuneハードウェア情報アップ!
というわけでG-Tuneハードウェア情報アップ!
うう、正直に言います。本日もぐーたらに過ごしていました。でもG-Tuneの方にハードウェアを追加しました。左の図は、そっちの方に載せている回路図と同じものです。実に簡単なハードウェアです。CPUボードの下にロジックICを配置した2段重ねで構成しています。あとこれ以外に電源回路と外部操作用のSWを実装したボードがあります。
このサーボドライブ回路、諸先輩方のホームページを参考にさせていただきました。ソフトのほうは、開発当時、SH7047Fを使っている方、ほとんど見かけなかったので、がんばって試行錯誤しました。
それにしてもG-Tune、コンピュータを載せるスペースを小さくしすぎて、部品を詰め込むのに大変苦労しました。SH7047Fの下に、ロジックICを4つ詰め込んでいます。これを作る前にテストボードで、わざとキツキツのやつを作って練習したんでなんとかって感じです。
こうやってピン数を見てみると、将来的につけたいものを考えても、H8/3664でもよさそうな感じですね。後、つけたいのは、アナログ入力が8本、デジタル出力が4本ぐらいで、これだけあれば当面やってみたいことはできそうです。でもG-Tuneはプログラムサイズが結構でかい(100K以上)ので、そっちが無理そうかな。小さく収まっている、ちょうどいいCPUないでしょうか。SH7047Fはとてもいい感じなのですが、消費電力の点でG-TuneにとってはきついCPUです。今回、マイコンプログラミングというのもなんとなくわかってきたので、ここらで一発、ちょっと違うCPUもまじめに検討していきたいと思います。
ROBO-ONE Jr.の記事をみてびっくり
ふう。やっとネットに復帰しました。
ROBO-ONE
Jr.に出ていたロボット、す、すご…
ROBO-ONE公式ページのほうで紹介されていましたが、ぼちぼちっていうか、ネットで第4回ROBO-ONEの記事があがってきていますね。その中で、ROBO-ONE
Jr.の映像がZDNNに出ていました。「びっくり」しました。す、すごい。G-Tuneの機動力を遥かに超えているロボットもあるし、すんごいアイデアロボットもあるし。うーん、本物を見たいかった。夏のROBO-ONEは、お盆休みとあたって、逆に休み取りづらいんですよね。「こんな連休に、さらに休みをとるのかぁっ」って白い目でみられそうで。
もし、G-Tuneのサーボを2つ外して(例えば腕をリンク式にして1サーボで前後できるようにするとかして)出場したら、1回戦でも勝てただろうか???まあ、軽量化もしないといけないんだけど。いやいや、これでびびっていては、「ROBO-ONEで勝てるかもしれないROBOTを作る」のが目標のSISO-LABの立つ瀬が無い。こんなにすごいものだったとは。ああ、HSWR-03の中村さんにお会いしたときに、「M&M-01」も見せてもらえばよかったぁ。そうそう、中村さんって、ROBO-ONEエントリーの写真見てて少し歳が上の人かなぁって思ってたんですが、実際にお会いしたら全然イメージ違って、きっと私より若い方です(本当はいくつなのか知らないのですが)。あと、「マルダー」の脚も綺麗だなぁ。起き上がりアイデアもすばらしい。みなさん、すごすぎるです。あれにラジコンの受信機(10gぐらいです)をつけたら、ROBO-ONEもでれちゃうじゃないですか。
というわけで、やる気倍増。まだまだ道はいくらでもある。さぁ、次のアイデアはなんだ?うーん、うーん、うーん。
G-Tune製作情報整理開始
G-Tuneの製作情報をぼちぼち整理し始めました。手始めに、いろいろ情報を追加するために構成の見直しと部品購入先のリストを追加しました。ほとんど、みなさんもご存知の購入先ばかりだと思います。少し知らないかもってのが、株式会社広杉計器さんぐらいでしょうか?秋葉原の方では、スペーサとかはお店で取り揃えているところがあるそうですが、うちのあたりは田舎のなので、ここでの通信販売はとてもありがたかったです。特に、ステンレススペーサとポリスライダワッシャは、G-Tuneの関節にとって「命」とも言えるものですので、大変助かりました。
History of SISO 「G-Tuneができるまで」
なんとなく急に、どういう経緯でG-Tuneを作ったのか書きたくなってしまったので、何気に執筆開始。きっと、見ている方にも参考(なんの?)になるかと思いまして。いやいや、きっとSISOという人間を知ってもらえるかも。
2002年2月頃
第1回ROBO-ONEをホームページで見て、興奮する。TAのかっこよさにちょっとほれ、R-Blue3にぶったまげる。世の中、こんな凄い人がいるんだ。他の参加ロボットもアイデア盛りだくさんで、「二足歩行ロボット」という言葉が、自分にとって近づいたような遠のいたような、複雑な印象を受けたのを覚えています。
2002年8月頃
第2回ROBO-ONEをやっぱホームページで見て興奮しました。森永さんのMIKEがMetallic
Fighterになって優勝した回です。何で見たのかは覚えていないんですが、第一回大会でMIKEが一歩目を踏み出した瞬間転んでしまい、その時、一緒にがくっとなっていたのをすごく印象深く覚えていまして、それだけに「すごい人だぁ」と改めて思った(私にとってはROBO-ONEのRINGにあがるだけですごいんです。だから「改めて」)記憶があります。
この頃から、なんとか自分で作れないかと思いはじめました。んで、とりあえずわかったことが「ラジコン用サーボを使っている」ということでした。
 2002年10月頃
2002年10月頃
自分で買えそうなラジコンサーボなんて4kg/cmぐらいだから、これでもし作ったらどうなるだろう?と考え始めまして、まずは紙で工作をはじめました。実は、この頃、マイコンやらなんやらなんて、全然考えていなかったんですよ。何でかっていうと、「何にも知らないので何から始めても同じだろう」だからです。そんなわけで、いちばん簡単そうだった紙工作によるデザインに入るわけです。そしたら、難しいの何の。トルクっていうのがあってサーボの軸間の長さが大事という事は知っていたんで、それなりの長さに収まるように…起き上がりもできて…なんてやっていたら時間がかかるのなんの。ちなみに文房具屋さんで売っている工作用の厚紙でできていて、黒い部分がサーボのつもりです。今、見直してみると、サーボってのは取り付けようのミミがあって、このサイズが結構ばかにならないんですよね。んでもまあ、あまあまながら、まあまあいい感じじゃない???でも実際には、股間とか足首が全然もたないんですよね、うんうん。
んで、とりあえずなんか形になって冷静になって考えてみると…「おいらの財力じゃ無理」に落ち着くわけです。いや〜、勢いって恐ろしいですね。最初から分かっている事を、なにかやってみたいと思う力だけで頭から追い出してしまう。当時、たぶん、心のどっかでは、真剣に作ろうとは思ってなかったと思うんですよ。でも何か近づいてみたい、何かしてみたくてどうしようもない、そんな気持ちだけで動いていたんだと思います。
 2002年12月頃
2002年12月頃
そんなわけでフルサーボロボットはあきらめまして、世の中のおとーさんなら誰でも夢見る「タミヤのギアボックスでロボット」製作に走り始めます。これがなかなか実はいい感じで進んでいたんですよ。フルタミヤギヤボックスロボット「YA-KARN」の設計に入るわけです。
右の絵が概略図です。このころ、タミヤのギアボックスを買ってきて、寸法とったりといろいろしていました。実際にこの図画完成したのは、2003年4月頃です。このロボットは、ヤカン型でかわいいロボットになる予定でした。ただギヤボックスタイプといってもいわゆるリンク式ではなく、どこまでも回るサーボのようなイメージで使用しているため、かなりの数を使用します。よくよく考えて本当に動かせたかどうかは非常に疑問です。
でも、結構、やってみたくありませんか?このロボット、コンセプトありまして、「関節作るから精度が必要になる。だから関節を作らなければいい」というものです。歩行部分は、ほとんど関節らしき関節が無いのが特徴です。
んで、最終的にこのマシンはいろいろな現実であきらめる事になってしまいます。
 2003年3月頃
2003年3月頃
YA-KARNの核となる、ようやく「いらなくなったマイクロソフトマウスから部品取りしたロータリーエンコーダをつけたタミヤギアボックス」を開発。超格安〜。んでも実は、まだモータドライバとか全然できてなかったんですよ。一応、ハンダ付けとか電子部品は、高校が工場高校の電気課で、電子部品に関する経験は少なかったですが多少なりとも心得がありましたんで、なんとかここまでは作って、LEDぴかぴかまではやりました。
2003年5月頃
あれこれ悩んでいても始まらないので、とりあえず、H8/3052FボードにRAMをくっつけるところから始めました。んで、作っていったらですね、これが結構大変な上、かなりの重さになってきまして、ショックを受けました。未だにまだ、一度も電源を入れていないかわいそうな3052Fボードが部屋に転がっております。んで、Best
TechnologyのSH7047Fボードの発売を知り、オーダーした次第です。今考えると、SH2/7045の方が使いやすかったかな。
そして、急遽設計変更。ここでG-Tuneの設計思想がでます。というのも、■タミヤギアボックスを使った場合、結局モータドライブその他もろもろ自作せねばならず、サーボのように大量に使用した場合、安くならない。■部品点数がかなり多くなり、第4回ROBO-ONEに間に合いそうも無い。■労力と投資の割にパワーが無い。という結論になったからです。どうしてもROBO-ONEにすぐに出たかったため、安くて構造簡単なロボットの設計に入りました。
また、マイコンのほうもSH7047F用のテストボード(LEDとSWがついているだけですが)の製作をし、テストプログラムなどを作り始めました。プログラムは商売なので問題は無かったのですが、やっぱマイコンというのが慣れてなくていろいろ苦労しました。
2003年6月頃
とにかくABSを切る、切る、切る、穴をあけるあける、そんな毎日です。あきたらプログラム。もう、とにかく睡眠時間を削って作りました。そして、とりあえずABSボディにサーボをくっつけたところまで完成!精度なんて言葉は微塵も感じませんが、屈伸ぐらいはできるところまでできました。そしてROBO-ONEエントリーしてしまいました。よく考えるとかなり無謀ですが、きっと思考回路も睡眠不足でヒートアップしていたと思います。
2003年7月頃
というわけで、本ホームページ立ち上げになります。振り返ってみると、むちゃくちゃな感じですね。でも本当にこんな感じで、いろいろな方針変更(挫折と言いますが)を経て、現在に至っています。ほかのみなさんも同じなのかなぁ。
とまあ、今回、とても長い話になりましたが、ここまで読んでくれた方、お疲れ様でした。というわけで、いかにもよくありそうな話の中でG-Tuneが生まれたか(適当に思いつきで始めて切羽詰ってパワー全開)、わかっていただけたと思います。こんなもんです。さて、寝るとします。
うーん、眠い。
未だ超爆睡
未だ爆睡はいりっぱなしでなんか調子が出ません。ちょっと風邪ひいているというのもあるんですが、稼働時間が少ないです。また、今までロボット製作のため、普通の買い物なんかも控えていたので、そちらのフォローも。そんなわけで、友人にデモするときにG-Tuneを引っ張り出してくるときぐらいしか、ロボットには触っていないです。でも、まあ、今までが今までだったので、こんな時間も良いもんです。こう、頭にリセットがかかって、「ああ、なんだか幸せだなぁ」って感じで。友人に見せると、反応が面白いです。やっぱ、ラジコンでてこてこ歩くのは面白いようで。
さて、ホームページの方ですが、ぼちぼちですがG-Tuneの技術情報をまとめだしています。そのうち、ごそっと「G-Tune」のページを入れ替える予定です。
「MAX歩行」ってなんでしょうか?
ROBO-ONEでデモをしていた「イトーレイネツ」さんの「R-I
Series」のホームページを見ていたら、「最近流行のMAX歩行」というムービーがありました。あの〜、もし知っている方がいらっしゃったら、こそこそっと教えて欲しいのですが、「MAX歩行」って何でしょうか?何かのアルゴリズムなんでしょうか?それとも「全開で歩く」ことなんでしょうか?(いや、これはないな)。今、ネットで検索しているんですがなかなかヒットしないです。今回は、べたべたなプログラミングで歩かせていますんで、次回はもう少し高級っぽい感じで、スムーズに歩かせたいと思っていまして、これからいろいろ勉強していくつもりです。またそっちの方もメモがてらに載せていきたいと思います。
ROBO-ONE、その後
 どっと疲れがでて超爆睡
どっと疲れがでて超爆睡
ああ、今日は良く寝ました。朝から夕方まで寝ていました。ROBO-ONEでは、実は舞い上がっていたせいか、ほとんど写真を撮っていませんでして申し訳ないです。SNOWさんのI-REN
MASKと記念撮影をした写真がありますので、載せさせていただきます。みなさんのロボットを見せていただいて思ったのが、「お、大きい…」です。でも、さらに小型化を目指したいと思います。やっぱ、大きい=パワーが必要→コスト高ってのが基本的にあるんで。まだまだ低価格路線、突き進んでいきますよ〜。なんて言ったって、そんなにお金が無いんだから。次回マシンも、使いまわし部品込みのトータル10万以下で…いや、工具分は今度は抜いていいですか?あっと驚くパフォーマンスのやつを行きます。こうご期待です。まだアイデアはありませんが、きっと出てくるでしょう。
えっと、あと成績の詳細についてです。昨日、予選は21位だったと書きましたが、ポイントはいくつだったの?という質問がちょっとありましたのでお答えしますと、334ポイントでした。というわけで、16位との差は31ポイントでした。
 オリジナルTシャツ
オリジナルTシャツ
今回、友達が応援に来てくれまして、オリジナルTシャツを作ってくれました。会場で着ていたのがそうです。すごくかっこいいので、ホームページの方にも載せることにしました。応援があると、プレッシャーとともに、テンション上昇します。持つべきは友。うんうん。G-Tune私設応援団のみんな、ありがとね!
G-Tune開発についての反省
反省といいますか、やり切れなかった事、やっぱいっぱいあります。
■予定していた動作プログラムが半分も作れなかった事。一部、設計ミスによりできなくなったものもあったのですが、脚を使った高速大技がほとんどプログラムできなかったのが残念です。
■操作系プログラムが間に合わず、「格闘ゲームのように操作できる」ところまではできませんでした。でも、「スティックを前に倒すと歩行だけど戻すと最短動作で停止」なんてのはできました。
■足裏に赤外線距離センサーをつけて制御する予定だったんですが、ぜんぜん間に合いませんでした。
■階段のぼり、全然手がつけられませんでした。でも、サーボ能力からいって、階段はさすがにきつそう、というのが今回わかりました。別のアイデアが必要そう。
■だいぶ重くなってしまいました。次は3mmネジはやめて、2mmネジにしよう。ネジももっと減らそう。FさんのFantom_aにネジがほとんどついてないのを見てすごく思いました。G-Tuneは、ネジ多すぎです。しかも3mmだし。少なくともG-Tuneには、3mmのネジじゃないと支えきれない部分はなさそうですし。
■単4電池ボックスには、ほんとはまりました。次回は電源1系統で。
■マイコンの消費電力が馬鹿にならず、G-Tuneのような小型機にはつらいので改善要です。
ROBO-ONE参加についての反省と次回へのアプローチ
結局、予選通過ならずでしたので、これについても反省することにします。なぜ、予選通過できなかったか?レベルが低いの一言で片付ければ簡単で説得力もあるのですが、どこが低いか、今のコンセプト維持で予選通過は可能なのか?ということを考えるにはもっとよく分析する必要があります。本格的な分析はこれからするとして、まずはざっくばらんに書いてみようと思います。もし、G-Tuneを実際に見てくれた方で、ご意見ご指南ありましたら、メールでも掲示板でも、ぜひお願い致します。では、思いつくままに。
■歩行が滑らかとは言いがたく、1mまっすぐに進む事もできない。また遅い。これは改善できそう。
■基本動作をこなすだけではダメ。大技が無いと。とはいえ、今の歩行速度では、ボックスダンスをして大技をする時間が無かったりするので、歩行速度アップは必須。
■ボックスダンス中のキックは、「止め」を入れた方がアプローチ度が良かったかも。
■もっとかわいらしいコミカルな動きも検討したほうがよいかな。
■歩行能力のアピールとして、脚をもっと上げたりするパフォーマンスを入れた方がよかったかな(脚を上げれる事がハイレベルとは思えないのですが、ご指南として出ていたわけですし)。今のままでも、6〜7cmまでは上げて歩行できますが、時間の都合上、プログラムしきれませんでして。
次回のために、必勝メモを作っていこうと思います。
 サーボについて
サーボについて
会場にて、サーボについてよく質問されたのですが、このスケルトンのサーボ、GWS社のPARK
HPX-BBです。ちょうどいい写真が無くてすいません。
なんでこれを使用しているかというと、大きさの割にパワー、速度があり、しかもこの値段(\2280)でベアリングが入っていまして、横向きに使っても大丈夫かなという判断でして。他のメーカのものを使ったことが無いので、性能云々というのは分からないのですが、いろいろ話を総合すると、遊びが多めで高速動作できるサーボにありがちな、やや使いにくいといった面があるようです。それでも、このサイズとパワーは魅力的で、結局、特に他のメーカに変更する事も無く、ここまできました。ちなみに購入先ですが、国内で取り扱っているところがありまして、SYSCOMというところです。インターネットでもファックスでもオーダーできます。
今回、いろいろインターネットで部品を購入しているのですが、そのうち、「G-Tune」の方をまとめて更新する予定ですので、そのときに、購入先リストとかを載せることにしますので、2週間ほど待ってください。
やっぱりあの吉野さんでした
先ほど、吉野さんのホームページを拝見したら・・・やっぱり吉野さんでした。しっかり、私との会話について書いてくださっていました。光栄です。(T_T)。またお会いできるときには、さらなる成長を披露できるよう、がんばりたいと思います。
ROBO-ONE、行ってきました。
おひさのごあいさつとROBO-ONE結果
おひさしぶりでございます。さてさて、行ってまいりました、ROBO-ONE。台風にも負けず。ほんと、雨にも負けず、風にも負けずです。行きは、マジ、大変でしたよ。台風の雨風がめちゃひどいところからスタートして、台風追い越して、川崎入りしてから車で仮眠して。高速道路、雨で前が見えなくて、みんな50km/hぐらいで走ってました。
さて、結果の方ですが、予選21位で決勝へは進めませんでした。うーむ。すべて自動動作でやりましたので、あれが現状でのベストのものです。「お父さんの1年分のタバコ代で作れるG-Tune(月あたり300円のタバコを20箱で換算)」、みなさまの目にはどう映りましたでしょうか?
現状でできることはすべてやれたので後悔はありませんし、上出来かななんて思いつつ、本音では結構複雑です。初物、低価格路線、勉強3ヶ月、製作3ヶ月と考えるとできすぎな気もしますが…いやいや、嗚呼、複雑。この複雑な気持ちは、次回ROBO-ONEに向けて燃焼させる事にします。それにしても、妻に感謝です。よく今日まで我慢してくれました。金銭的に言えばそんなに負担をかけてはいないと思うのですが、やっぱ時間的にはかなりフォローしてくれてました。謝謝!
ROBO-ONEで得たもの
ほんと、今回のROBO-ONE、ぶったまげました。2点倒立があったかと思えば、さらに1点倒立まで!(九州大学チームさん、すごーい!チーム参加っていうのも雰囲気いい感じで楽しそうですね!)。常連さんも凄いんですが、初参加の方もすごかったです。もう刺激刺激。興奮物でした。また、G-Tuneの方も、予選落ちながら21位と、まあ、方向がまったく違っているとか、受け入れられないものというわけでもないことが確認できて、手ごたえを強く感じましたし(予選残り12台の時の中間発表では15位だったんですよ。ダメダメと思いつつ、すごく心臓に悪かったです)。
また、参加者の方といろいろ話をする事ができました。この話はまた改めてするとして…私に話し掛けてくれた方で、サーボにも詳しくていろいろ教えてくれた方がおりまして、名前、聞き忘れてしまったんですが、後でよく考えてみると、かの吉野さん(「吉野のロボット」)のような気がしてならないんですが、気のせいでしょうか???違っていたらごめんなさい。
それでは、さすがに今日は疲れましたので…おやすみなさい!