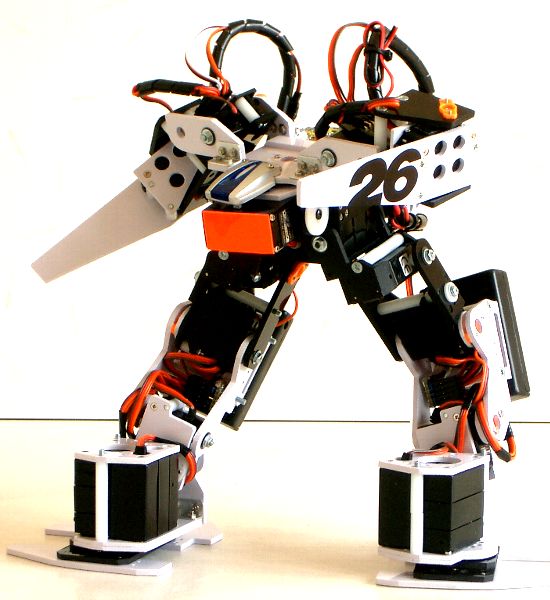
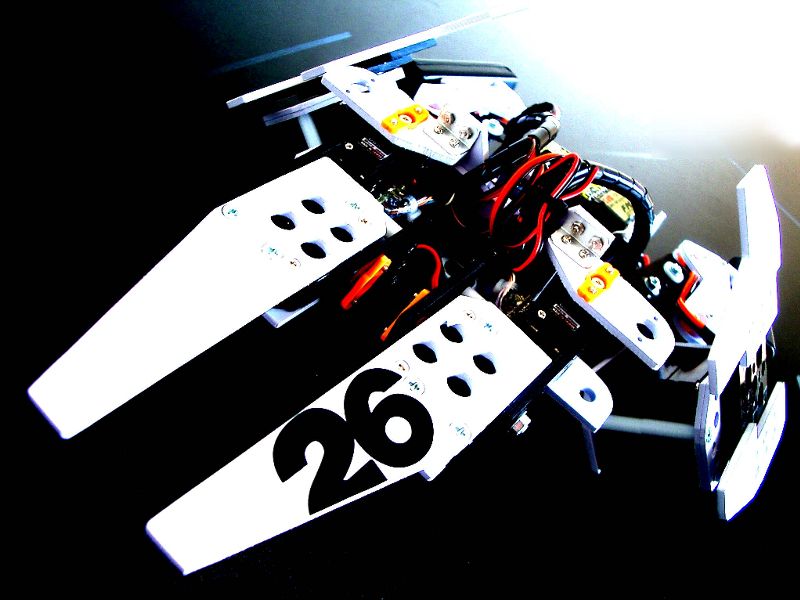
写真で見ると大きいような感じですが、実は、かなり小さいです。お金があれば、もっと大きくて力強いのを作りたいです。
バッテリ込み、18サーボでこの重量!は結構軽いかな?と思います。でも、本当はもう少し軽くしたかったです。1.2Kgが目標です。
すべてラジコン用サーボで構成しています。2種類のサーボを使っています。
アルミアングル(t1mm)
2mmと3mmのABSを使用しています。基本的には3mmを1枚もので使っていますが、2mmを2枚張り合わせて使用しているところもあります。ボディは、白と黒で構成されていますが、どちらもABSの色そのままです。白が結構きれいです。後、一部、アルミアングルを使用しています。
(CORE)
勝手に命名!SIPHA SYSTEMと呼んでいます。「SISO JUNK STUDIO (LAB) INTELLIGENT PUPPET HANDLING ARCHITECTURE」の略です。CORE側は、秋月通商のH8/3664を使用しています。これに32KByteのI2CシリアルEEPROMをくっつけて、動作データなどの保存をしています。
C言語
シリアルEEPROMにAction
Scriptと呼ばれる動作データを持っているため、動作データを変更しても、H8/3664のROMに焼き直す必要はありません。
外部回路無しで18chのサーボを制御する能力があります。また、R/C受信機の信号をリアルタイムに取り込むことができ、サーボ動作に影響なく扱うことができます。さらに、加速度センサ(パルス)も読み込めたりします。
(TERM)
SIPHA SYSTEMのパソコン側端末です。主だった機能として、ダイレクトにCOREに対してサーボ動作指示を与える機能、Action Scriptの転送を行う機能、SIPHA-COREのメモリダンプ機能、初期データ(サーボのオフセット値とか)を転送する機能があります。まだまだチープなソフトウェアです。
ラジコンプロポです。今のところ、個人的には信頼性、操作性、コストパフォーマンスともに、「いい!」と思っています。
小型軽量のラジコン受信機です。本来空用なのですが、クリスタルのコネクタを付け替えて、フタバの陸用クリスタルをはめたらちゃんと動作しました。
GWS MICRO-MG
GWS MICRO-MG
GWS S03T
MICRO MG(お手製スラストベアリング仕込み)
GWS S03T
GWS MICRO-MG
GWS MICRO-MG
GWS MICRO-MG
GWS S03T
GWS S03T(お手製スラストベアリング仕込み)
GP社の2000mAhのものを、6本使用して、7.2V駆動しています。大丈夫なのかな〜…今のところ大丈夫です。制御電源も兼用です。なんと、電池ボックスで普通に実装されていたりします。