ブレッドボード
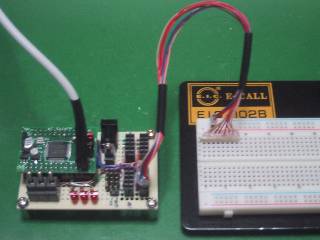
今回より、電子部品テスト用新アイテム、「ブレッドボード」を使うことにしました。これで少し楽になるかな?ブレッドボードとは、電子部品をブスブス挿して回路をくみ上げることができる便利グッズです。上段から、電源用、回路用、電源用となっています。電源用のところは、+、−それぞれ、すべて接続されています。また、回路用の方は、上下ブロックそれぞれ、縦方向に接続されています。穴がいっぱいあいており、ここに部品を脚を刺すことができます。
ためしにいろいろ部品を抜き差ししてみましたが、ICソケットで丸ピンではないタイプ(安い方)がどうにも入りませんでした。挿しても、押し戻されてしまうのです。というわけで、使うことはないとは思いますが、ブレッドボードにICソケットを挿す場合は、丸ピンタイプをお勧めします。ちなみに、ピンヘッダは入らないことはないけど、「やめた方がいいよ」とブレッドボードが話し掛けてきたような気がしたので、やめました。
|
|
ブレッドボードとの接続ケーブル 上段の写真は、H8/3664用のケーブルです。左側がブレッドボード側、右側がマイコンボードへの接続コネクタです。ブレッドボード側は、信号線用ピンと電源供給用ピンがあります。ブレッドボード側の接続ですが、32PのICソケットをニッパで切ったものを使って作りました。電源の方に接続しているのは、「丸ピンICソケット・両端オスピン」です。マイコンボードの方から給電できるようにしてあります。ハンダ付けしたところは断線しやすいので、断線防止のためにホットボンドで固めてあります。 中段の写真は、接続したところです。さて、あとは捨ててあったイーサネットのケーブルをカットして…です(ZIPPONさんのHPより。ほんと、ブレッドボードに挿すのにちょうどいいですね、これ)。 ついでにSISO-LAB製SH7047Fテスト基本ボード用も作成しました。多分、いろいろなデバイスを試すのは、SH7047Fの方が活躍する(SRAMが載っていてプログラムのダウンロードが気軽にできますんで)と思ったので、ちょっとピン数が大目に作ってあります。 2つのマイコンを接続して何かテストっていうのも簡単にできそうで、いい感じです。これで電子回路に弱いSISOも、ばりばり実験!です。
|


H8/3664とテストボードの製作
前回の「不定期TOPIC」の通り、CPUをH8/3664に換装したいと思ってます。まずは、開発環境の整備ということで、開発用テストボードを作ってみました。I/Oピンの使い方などはだいたい決めましたので、それに基づいて、作ってます。今回は、外部回路無しでサーボドライブが目標ですので、ドライブ用のIC等はつけていません。最悪、うまくドライブできなかったら、SH7047Fでやったときと同じように、AND回路をくっつけようと思っています。I/Oピン等のハードウェアリソースの使い方は、そのうちまとめてお見せしますので、しばしお待ちを。
前回、SH7047Fでソフト開発するときもテスト用のボードを作ってやっていたんですが、前回は、マイコンがなんたるかもよくわからず始めたこともあって、妙にリッチなすごく使いにくいボード(SWが12個ついていて、LEDが16個ついている。振り返ってみれば、1/4の機能ぐらいしか使わなかった。)を作ってしまいました。そんなわけで、今回は、シンプルにまとめてみました。また、今回より、電子部品テスト用新アイテム、「ブレッドボード」を使うことにしました。
それでは、今日は、キュートなH8/3664の紹介です。こんな風に組み立ててみました。
|
|
AKI-H8/3664 写真左側ピン:内部レギュレータ有効/無効ピン 写真右下ピン:シリアル通信ピン
|
|
|
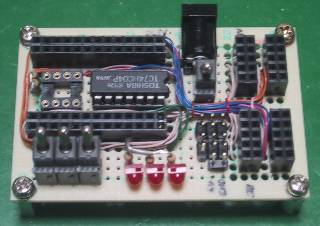
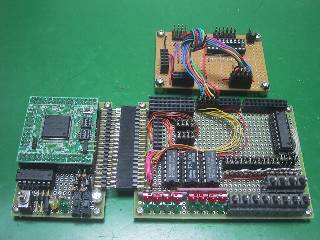
H8/3664テストボード LEDに接続しようと思ったポートは、LEDドライブが難しそうだった(本当は大丈夫?でも小心者ですから)ので、74HC04にて電流吸い込みドライブするようになっています。このICは、CPUボードの下に配置しました。また、左の方に見える、8PのICソケットは、I2CのシリアルEEPROM用です。信号線は、1KでVCCにつってみました。まだ、未テストですので、シリアルEEPROMへのアクセスがうまくいったら、また報告します。電源は、直接5Vの電源をいれることにしました。 右の方のピンコネクタは、現行G-Tuneに接続するためのコネクタ類です。新型も同じようなI/Fにするというのと、メカが間に合わないときに、とりあえずテストで現行機に接続する、等の状況を考慮して実装しています。 マイコンボードのシリアルコネクタを上側に出してあるので、マイコンボードを逆ざしして壊すことは無いとは思うのですが、一応、テストボード側のピンコネクタにも、あまったリード線で詰め物をしました。 配線の方、前回、だいぶ頑張ったせいか、今回はだいぶスムーズにできたと思います。何事も練習です。ちなみに、な〜んで小さく作ったかというと、それは試練です。G-Tuneに載せる時には、もっと小さなボードにのせますので、今のうちにレベルアップしておくためです。 ご参考用に、前回製作したテストボードも載せておきます。無駄にリッチですね〜。もし、新たに製作するのでしたら、上のものぐらいで充分ですよ。
|


祝!一周年・姫路ソフトワークスさん
お久しぶりです。ほぼ1週間ぶりです。というのも、昨日は東京出張で(ちょっと寄り道して秋葉原にて部品購入してきました♪)、デジカメも出張中で、現在、H8/3664のテストボードを作っている最中でして…また出来上がったら、写真とかアップします。ところで…
姫路ソフトワークスさんのホームページを見たら、ロボットが新発売になっていました。いやいやびっくり。一周年記念なんですね!おめでとうございます。
で、じ〜っと見ていましたら、「むむ、このサーボは!」 このサーボ、日本で買えたっけ?(いや、少なくとも日本のインターネットでは無かったハズ)ということに気づいてしまいました。GWSのMICRO MGです。PARKとほぼ同じサイズなのに、メタルギアで6kg-cmオーバー。実は、SYSCOMさんでも聞けば買えたのか?とかいろいろ考えたんですけど、さっそく検索しました。
そしたら、あの「浅草ギ研」さんで扱っているではないですか。ホームページをよく読んだところ、7月から取り扱い開始しているとのことで。なかなか安価でよさげです。う〜ん。欲しい。欲しい。全部これに変えたい。でも予算が…。足首と股間だけでも入れてみようかな〜なんて思案中です。
G-Tune Firmwareの整理
ソフトの整理をしようっと
かなり勢いで、G-TuneのFirmwareは作ってしまったんですが、ちょっと整理して絵にしてみることにしました。というのも、SH7047Fは、サイズは最高なんですが消費電力が大きいので、G-Tuneのような小型クラスではちょっときついかなと思いまして、載せ換えを検討しているからです。
やっぱ、G-Tuneですと、マイコン専用に電源を持っているのもつらいですし、ZIPPONさんに昇圧回路キットを教えてもらったですが、これも400mAは取れないですし、400mA取れるようにしたらもっと大きなものになりそうですし。というわけで、せっかくマイコンプログラミングにもなれてきたことですし、消費電力が小さくて、サイズも小さいボードを探していました。
ところが…なかなか無いです。Best Technology SH7047Fって、かなりコンパクトなんで選んだ、というのがあるんですが、どのCPUボードを取ってみても、これより大きいです。そんなわけで、これ、どっかな〜って思ったのが、H8/3664 QFP。こりゃ、安い、小さい!いいですね〜。こんな小さいので動いたら、うれしいですね〜。でも、ROM 32K、RAM 2K…。パワーも無いです。そんなわけで、これで動かせるかどうか、どう改良したら動かせるかなどの、頭の整理をするためにフローダイアグラム風のものを書き出しました。「G-Tune/ソフトウェア」の方に、載せたかった図なんですが、ようやく書きましたって感じです。あっちの方では、構成を中心に記述してありますが、こちらは流れを中心に記述しています。
 G-Tune
Firmwareのフローダイアグラム風の図
G-Tune
Firmwareのフローダイアグラム風の図
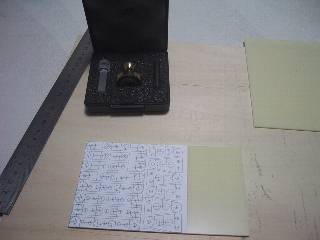
じゃ〜ん。初公開(いつでも何でも初公開ですが…)のG-Tune
Firmwareソフトウェアのフローダイアグラム風です。小さくて見えません。しかも手書きです。大丈夫です。クリックすれば拡大した図が出てきます。でも、拡大しても字は汚いのですいません。個人的には、こういう図だけは、ごちゃごちゃ書き入れていくことができるので、大きめの紙に、手書きで書くのが好きでして…。こういうのは、見通しという点では、あまりそれぞれの処理レベルを考えずに書いた方がよいと思います。
図の見方ですが、特にルールはありません。フィーリングです。基本的には、四角枠がソフトモジュールみたいな感じで、角円の枠がデータです。細かいデータとかは書いてありません。それぞれの枠の中には、代表的な名前と処理がメモってあります。
なるほど。こうなっていたのかぁ。マジな話で、お仕事はソフト屋ですが、ここ数年、まともにソースコードは書いていません。やっているシステムが大きいため、人に指示するための資料を作ったり、お客さんと打ち合わせしたり、謝ったり、言い訳考えたり…そんな仕事ばかりです。
そのわりにはいい感じですね〜。それぞれの処理の解説は「G-Tune/ソフトウェア」を見てください。そのうち、まとめておきます。やっぱ、SH7047Fで、メモリサイズや処理効率をあまり考えずに作っただけあります。でも大した事やってませんね(笑)。
経験的には、リソースが少ない(メモリ、パワー等)コンピュータ用にプログラムを書こうとすると、どんどん職人芸的になっていく傾向があり、後で見直しても、わけがわからなくなるプログラムになりやすいです。それでも、そこそこの見通し性を維持しようと思うと、こういった大枠のブロック図などでコンセプトを維持することは、大事なことだと思います。
大まかな作戦(目標)
というわけで、しばし考えた結果、目標とするアイテムは、以下のとおりです。
■ROMが足りないので、シリアルROMとやらにチャレンジする。
■専用端末ソフトを作って表示データを減らすことでROMの節約。
ちなみに現在のものは、表示データだけで30K以上あります。
■高速計算ルーチンの見直して、よりコンパクトかつさらに高速化。
■外部回路無しでG-Tune駆動。
■その他いろいろ。
う〜ん、で、できるんかな???実現性は…Windowsのシリアル通信プログラムなんて、5〜6年ぐらい前にちょっとやったぐらいで、ほとんど覚えてないし。そもそも、Windowsってどうやってプログラム組むんだっけ?きっとインターネットで情報が…お、いろいろありますね。シリアルROMは…PIC関係のホームページで情報がありました。それよりなにより、GDLにもアクセス関数ついているのを発見。お、いけそうじゃん!というわけで、しばし、H8/3664と戯れてみようと思います。
スーパーなんちゃって歩行(3)
どもども。久々の更新です。ちょっと出張がのびてしまってなかなか帰ってこれませんでして・・・。さてさて、いよいよスーパーなんちゃって歩行の最終編です。

スーパーなんちゃってポイントその3・体重移動開始のひみつ
せっかくロボットなので、使えるパワーは使うことにしました。左の写真を見るとわかりますが、左足に重心を移すため、まず、右の足裏を内側にひねります。足裏には幅がありますから、結果的に脚の長さが右足よりも長くなり、おっ、身体が左に傾きます。とってもロボットな足裏を生かしたような、なんだかな〜な方法です。これに合わせて左足首も外側に曲げ体重移動完了です。後は、脚を伸ばしきった状態(実際には少し曲げていますけど)で踏み出していきます。
一歩目を踏み出して着地した後も同じことをやっているのですが、ここでは左から右への重心移動を滑らかに行う(サインカーブな加減速をしています)ことにより、足首内側ひねりへの依存度を減らしています。これは、股間の保持力もそんなに強くないため、足首を内側にひねることで、どうしても開脚方向に力が働いてしまうため、これを軽減するためです。
そうやって考えると、うまくコントロールできると「つま先」って、すごく効果絶大かもしれませんね!力関係や動き開始の理由は違えど、人間も、足首とつま先を使って同じようなこと(各関節の動きを最小にして腰と地面間の距離を調整している)をしているような気がします。人間が、なぜ楽にスムーズに歩けるかという疑問を解く1つのカギなのかもしれません。
スーパーなんちゃって総論
というわけで、一見すごいんですが(4.8Kg/cmの小型アナログサーボで軸間6cmのロボットが歩くんだから、ある意味すごいって言ってみてもいいかなーっと思いまして)、かなり「なんちゃって」な二足歩行です。G-Tune改良への糧とするため、整理がてらまとめてみました。
ここまで書いていて思ったことがあります。少なくとも歩行については、人間の足首ってそんなに力を使っていない気がします。これに対して二足歩行機構を実現するのに、強力なサーボを使うのもメカニカルストッパを使うのも、似たようなもんかな?ってことです。もちろん人それぞれ観点は異なりますので、賛否両論あるとは思います。少なくとも、メカニカルストッパ方式で、スムーズにゆっくり歩いたり早く歩いたりといった柔軟性のある動きは難しいかと思います。
さて、G-Tune (2003A)ではこれが限界でしたが、次回は…もっと柔軟性のある動きをさせるためにも、もう一工夫したい部分です。そんなわけで、今日もアイデアと冷や汗を絞るSISOです。
次回ROBO-ONEレギュレーション案
ROBO-ONEのホームページを見たら、新しいレギュレーション案がでてました。うーん、無線8chか〜。クリスタルが1セット1750円だから、あと5個買い足すとして…は、はっせんななひゃくごじゅうえん〜!これはきついです。結構、通信システム、買いなおさないといけない人もいるんでしょうね〜。将来はID付きというのも、そういったスペックのものを考えると結構な値段な気がします。スペースも結構きつそうですし。うう、SISO-LABの予算ではだんだん難しくなってきます。
とまあ、へこみ気味で読んでいましたが、その他はなんか、ちょっと早すぎかな?って感じもありますけど、おもしろそうですね!実際にやってみないとわからないことは多いですが(ルールの抜け穴とか)、技の種類も増えてくるでしょうし、より見ごたえがでてくるんじゃないでしょうか。予選規定演技のところにある、本の上り下り?何故に本なのでしょう?予算の関係?(んなわけないですよね)これが結構時間使いそうです。予選デモ時間の変更は書いてなかったので、これも考えてデモするってことは、結構、難易度高めな気がします。手で本の前まで運んでもいいのかな?電話帳ではないことを祈っています。
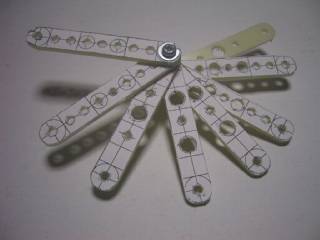
オプティカル・センター・ポンチ、さらにその後
 3本ビス通りました!
3本ビス通りました!
あれからABS加工の方をちょこちょこやっていたんですが、2mmのABS6枚ですが、なんと今度はビスが3本通りました!記録更新です。いや〜、ほんとびっくりです。手加工でここまで精度が出せるとは、恐るべしオプティカル・センター・ポンチ。というか、今まで、これぐらいの精度すら出せなかったのにロボットを作っている自分にもびっくり(笑)。
再びここから削ります。ヤスリはそこそこ大きさがあった方が使いやすいです。それにしても次期マシンは細かい部品が多くなりそうなので、加工方法も少し考え直すことにしよう。
気になる部品
バンダイ・サーボクラフト(仮)
バンダイロボット研究所のHPでROBO-ONEバンダイカップinおもちゃ未来博の記事を見ていたんですが、バンダイのおもちゃバンダイのサーボクラフト(仮)っていつ発売されるんだろう???S(2.4kg/cm)、M(10.3kg/cm)、L(24.7kg/cm)があります。ラジコンサーボと比べると速度は遅い(2秒一回転…サーボで言うと0.33secだったか?3種類とも同じかわからないんですが)ようですが、割と十分なのかな?殴るには遅そうですね(笑)。
安いそうなので、低コスト機にはいいかも。足首だけでも使いたいなぁと思う今日この頃です。制御方式とかもよくわからないんですが、専用の制御基板があるのでしょうか?G-Tuneに載せることを考えると、制御基板の大きさも気になります。マイコンで直接接続できるのかな?G-Tuneは、デザイン上、とにもかくにもスペースが無いんです。メインの基板サイズ(マイコン+ドライバ関係)はなんと51mm×46mm。これにSWとか電源が載った、さらに小型のサブボードが接続されています。なんでこんなにせまくなっちゃったのかは、自分でも「作っていたらなっちゃった」としか言いようがありません。
一応、ちょっと期待して、機体設計は待ってみようかなぁ。多分、一番小出力なものの値段でしょうけど、価格1,200〜1,300円ぐらいっていったら、工作用のギアボックスに匹敵しますよね。ROBO-ONE系機体でも予算5万円ぐらいとか。かなり期待しています。今のところ、新しい情報は無いので、もうちょっと様子見って感じでしょうか?
距離センサ
シャープのPSD距離センサーがすごく気になっています。これ単体で、距離が計測できる!そんわけで、ROBOCON館で、シャープの距離センサを注文しようと思ってホームページにアクセスしたら…品切れだそうで、ショック。メールで問い合わせたら(いつもながら回答早く、好感度高いです)、入荷予定はあるものの、納期未定とのこと。次期G-Tuneに搭載しようと思っているので、早く入荷することをひたすら祈ることにする。安くて使いやすそうな距離センサって、なかなか無いんですよね〜。G-Tuneは、なかなか動きに凝れないので(今の予算で、ROBO-ONE本戦で耐えられる強度を維持しつつ、あれこれできるようにするのはかなり難しい)、センサーに凝ってみようかなと思っていたので、困りました。早く入荷しないかなぁ。ああ、欲しい欲しい。
オプティカル・センター・ポンチ、その後
  |
本日はヤスリで整形 左の写真は、穴あけして切り出した8枚ぶんのパーツをビスで固定したものです。整形するときは、ちょっとサイズを大きくしたほうがやりやすいのと、この方が、なんとなくきれいに仕上がる(直角もでやすいような気がする)ような気がするので、いつもこうやってやってます。このパーツは穴がもともと必要な部品ですが、そうでないパーツでも、結構、加工時の固定用に穴をあけてやっていたります。 驚きなのは、「穴の修正無しでビスが2本とめれる!」ことです。8枚ものパーツでこれができたのは、SISO-LAB始まって以来の歴史的快挙です。いつもは、片方の穴をビス止めすると、間違いなく反対側の穴にはビスがとおりませんでした。今回は、すっと通るとまではいきませんでしたが、指でねじれば入っていきました。ということは、設計値からのズレは、0.1かもうちょいぐらいかな?初回でこれですから、もうちょっと練習して、あと穴あけをなんとかすればさらによくなること間違いないと思います。ああ、先行きが明るい!これで、もっとつめた設計ができます。いや〜、今までは、1mmぐらいずれてもABSが割れないような設計にしないといけなかったもんでして。 穴あけ ともあれ、ぐぐっと未来が明るくなってきました。もう、ボディ、全部作り直しちゃおっかな!
|
スーパーなんちゃって歩行(2)
さてさて、「スーパーなんちゃって歩行」の続編です。
スーパーなんちゃってポイントその2・腰を落とさず突っ立って歩行
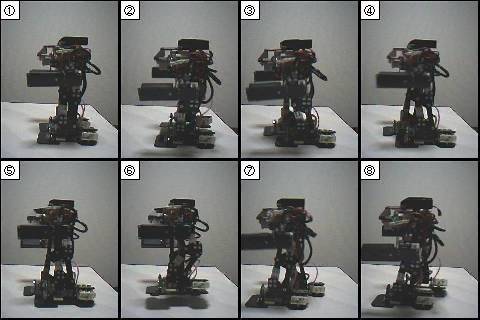
上の写真は、歩行の連続写真です。動画から落としたので、ちょっと小さくてわかりにくいかもしれませんが、脚の間接に着目してください。ほとんど膝をまげておりません。唯一曲げているのが6番の写真で、脚を上げているときだけです。この連続写真から接地している脚は膝をほとんど曲げていない)のがわかると思います。
「その1」にもでてきた、サーボパワーと動かせる重さの話と同様、やはり腰を落として膝を曲げていくと、だんだんサーボにパワーが要求されるようになってきます。これは人間でも同じですね。中腰でいると、すごく疲れませんか?対して、突っ立った姿勢というのは楽ですね。歩くときも、中腰で歩くより、なるべく脚を伸ばして歩いたほうが楽です。メカ的に言いますと、地面に対して脚が水平(ちょっと変な表現ですが)になるときが、最も力が必要になります。垂直になるにつれて徐々にパワーが必要なくなり、完全に垂直になると力はほとんど要りません。G-Tuneは、直立でしたら電源なしでも立っていることができます。
そんなわけで、なるべく脚を伸ばした状態で歩行をするようにしています。実は、「完全に片足を上げて歩行する」という点で行けば、6番の写真のように脚曲げて上げる必要はありません。この写真において向こう側(右側)の脚は、ほぼ伸ばした状態になっていますので、体重移動をしている状態ですと、左足を伸ばしたままでも接地しない状態になります。でもそれだとアピール度が弱いので、あえて曲げています。
ある意味、とても人間的です。また、今のG-Tuneのような、滑らかでない「ぎっこんばったん」な歩行をする場合、ほとんど慣性の効果を期待せず、常にフルに体重を支えていることになりますので、この楽に姿勢保持をするというのは、非常に重要になります。何しろ、少しかがむだけで、片足で体重を支えることができませんから。というわけで横歩きのときは、倒れていくのも考慮してスクリプトを組んでいたので、かなり苦労しました。
「腰を落とさない」ということは…どうやって第一歩目の脚を上げるんだ?というところに疑問を持たれると思います。その話は「その3」でしますので、しばしお待ちくださいません。
オプティカル・センター・ポンチ、いいっすねぇ
今日は、やっとオプティカル・センター・ポンチ使ってみました。午前中はお買い物に行って、さあ、昼からやろっか?と思ってたんですが、そういえば、昨日、外付けハードディスクを買ってきてたんで、「よし、これでパソコンのバックアップを取っておこう」と思ってちょっとやり始めたら、しょうもないことではまってしまいまして…。
え〜っと、何にはまったかといいますと、外付けハードディスクってFAT32というやつでフォーマットされていまして、よく考えたら、これって、1ファイルのサイズは最大4Gまでしか作れないんですね。バックアップで、ばかでかいアーカイブファイルを出力していたんで、こんなものぜんぜん気づかずに悩むこと数時間でございまいした(笑)。NTFSしか使ったことがないもんで…。やれやれ。
とか言いながら、ポンチ打ちまではできましたので、レポートします。
そうそう、なんで、オプティカル・センター・ポンチを買ったか?という話をしていませんでした。自分は、メカ加工がめちゃくちゃへたくそです。これをなんとかしようと思ったら、1つの方法として、工具を良くしていくというのがあります。その中でも、まず、最初の位置決めとなるポンチ打ちをなんとかしないと、後の加工工具をいくらよくしてもダメかな?と思いまして購入に至ります。仕事しててもそうなんですけど、やっぱ上流工程で作ったミスは、どんどん大きくなっていきますから。では、使用レポートです。
 |
初打ちとなりますABSは、2mmのABSで、次期G-Tuneに採用しようと思っている、軽量パーツのテスト用サンプルです。写真に写っているのは、SISO-LAB最高級工具「オプティカル・センター・ポンチ」と、いつもの作業台、金尺です。適当に作業しやすいように切ってからやってます。 先に書いておきますが、オプティカル・センター・ポンチは、構造上、材料の端部分はちょっと苦手です。でも切ってしまったので、端のほうをポンチするときは、同じ2mmのABS板をあててやりました。
|
 |
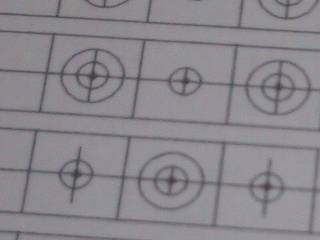
そんでは、まずはレンズをいれます。ストロボ無しで写しているのでこんな感じですが、ストロボ使って撮影すると、装飾品みたいに写ります。ほら、こんな感じ。どこぞのオーパーツみたいですね!
|
 |
のぞくとこんな感じで、「十字」が見えます。ABS板のほうにも十字が書いてあるので、これと合わせます。覗き込む私を、妻が不思議そうにみていました。身内には、何をやっているか、何が見えているのか説明しておいた方がいいと思います。 注意点(というか、自分がミスった点)としては、ちゃんと真上から見ることです。真上から見ていない場合、少しレンズをひねると、ABS板の十字の中心とオプティカル・センター・ポンチの十字の中心がずれますので、慣れるまでは、確認しながらやるといいですよ。 |
 |
あとは、ポンチに入れ替えて「コツン」とやります。 実際には、本体を手で押さえたままで入れ替えるのですが、非常に隙間が無いといいますか、精度が高い感じがするといいますか、抜くときには「ポン」という小さな音が、入れるときは「すぅぅぅ」という感じがします。びっくりです。 |
 |
はい、できあがりです。妻がカメラを使っていたので、以前のカメラで撮ってます。ちょっとボケ気味ですいません。小さい丸が3mmです。結果は、超良好!今まで打っていたポンチとは、できのクオリティが違います。(以前のクオリティは、G-Tuneの大きな写真を見ていただければ…1mmぐらいは結構、平気でずれてます) 前半、ちょっと慣れず、うまくいかなかったのもありますが、真上から見るコツがわかってからは、かなりいい感じです。今までと比べれば、天と地の差のできです。今後、より使い慣れていけば、もっとよくなっていくと思います。 さて、後は穴あけなんですが、本日、時間切れのため、また後日ということで、現在、ホームページを書いてたりなんかします。 それでは、おやすみなさい。
|

ドリルをABS加工用に削ってみました(ぐぅれいと)
※ 樹脂(ここではABS)加工用にトリミングしたドリルは、金属用には使えなくなりますので、参考にされる方はご注意ください。
 |
カーボン複合素材で芸術的ともいえるフレームのロボットMAGIを作られているZIPPONさん(Project MAGI)に、「ドリルをちょっと削ってあげると簡単に穴があく様になる」ということを教えていただきましたので、さっそくやってみることにしました。左の写真は、私の安物6φドリルです。よくホームセンターで売っているやつです。金属用として売っていたもので、いくつかのサイズがセットで入っていて、500円ぐらいのものです。G-Tune製作には非常に活躍している道具です。 このドリルでABSに穴をあけようとすると、まずいきなりではあけられません。すごい勢いで、ABSの方が跳ね上げられます。また、徐々に広げていった場合でも、かなりの力で材料が回ろうとし、挙句の果てにはドリルの刃を駆け上がり、ドリルチャックまで自動的に行ってしまったりします。 それにしても、アップで写真を撮るのはなかなか難しいです…。 さてさて、これがどう改善されるか、こうご期待です。
|
 |
えーっと、赤い丸の中をご注目ください。この写真はドリルの先っちょです。白く光っている部分を良く見ると、非常にエッジが立った状態になっているのがわかります。このようになっている部分は、反対側にももう一箇所あります。 ドリルが回転すると、ここが材料に食いついて、ぐいぐいと材料を削りあげることにより穴があくわけです。で、これからやるのは、ここを少し削り取り、ぐいぐいと削り取る量を減らします。材料に対して垂直になるところまで削ります。本当はいろいろあるんでしょうけど、プロではないのでわかりませんが、まずは教えていただいたとおりに…。
|
 |
さてさて、ホームセンターに行って買ってきましたのは、ダイアモンドヤスリ(300番)。多分、刃物を仕上げるためのものならば何でもいいと思います。砥石の方が本当はよかったかな?写真のようにしてドリルを当てますので、角のあるものにしてください。間違っても丸棒状のものは買わないで下さい。 買ってきたダイヤモンドヤスリ、薄くてちょっと使いにくいので、あて木の上に載せて使っています。 ヤスリ面とドリルが水平になるように気をつけながら、次の写真の状態になるまで削ります。ものの数分です。両面ありますので、忘れずに行ってください。「しゃ〜こ、しゃ〜こ」、ヤマンバみたい…(笑)。
|
 |
さて、できあがるとこのような状態になります。赤い円の中を良く見ていただくと、オリジナルでは非常にエッジが立った状態になっていたものが、軸方向に対して水平な面ができているのがわかると思います。 この材料に対して「いかにも食いつく」という角度から、「垂直に削っていく」ような角度に変わっているのがわかるとおもいます。 これで、やわらかい材料に対して、食いついていく量が減り、やさしくなるはずです。 |
 |
これは上の写真の状態からドリルを90度ひねった写真です。先の水平な面がよく見えると思います。写真中で白く光っている部分が削った部分です。 ちなみに、ZIPPONさんに教えていただくまで、ドリルを削ることができるというのも知らなかったSISOです。 |
 |
「試し穴あけ」です。 結果は、「すばらしい」です。ものの数分の作業で、こうも違うのか?と思うような結果です。 この写真は、3mm厚のABSで9mm幅にカットしたものです。世に言う、切れ端です。Fさんのところ(Fantom Ring)で買いました。そういえば、まだ白いABS、選択できないですね…。 この板に下穴とか、段階的に広げるなどの方法を取らずに、6φのドリルでいきなりあけてみました(危険ですので、良い子はいきなりやってはいけません)。 ■ごりごり食いついて掘り起こしてるという感じが、削り落としている感じに変わりました。 う〜ん、ぐぅれいと!たった5分でこんなに変わるなんて信じられません!もう他のドリルもじゃんじゃんやってしまおう!って気になっています。ZIPPONさん、どうもありがとうございます!
|
オプティカル・センター・ポンチ到着
   |
念願のオプティカル・センター・ポンチが到着しました。Jin Satoさん(JinSato's Robot Factory)にお願いして(どうもありがとうございます)購入していただいたものです。写真にはありませんが、プチプチでくるんで封筒に入れていただいた上に、クリアシートで封筒ごと巻いて送ってくれました。心遣い感謝です。 さてさて、まずは開いてカナダから長旅お疲れ様!って感じです。記念撮影です。何しろSISO-LABでは最高級工具です。\5,500-でしたが、ケースからして高級感が!1万円とか、本当はもっと高いんじゃないんですか?と思ってしまうような雰囲気が漂っています。 ケースの手前を親指で押すと、静かに開きました。少しだけあくところが初々しくて、これまたいいですね〜。さあさあ、中はどうなっているのかな???初めてあけるときの感覚ってたまりません。みなさんもそうですか? 開くと、スポンジ上に、左から「レンズ」、「本体」、「ポンチ」という順番で、鎮座しておられます。買ってみてわかったんですが、レンズって、透明の円筒状の塊で、先っちょに十字マークがついています。買う前は、ミスるとポンチでレンズを打ってしまうものかと思っていたのですが、その心配はなさそうです。 こんな感じでパッケージされていると、贈答品にもよさそうです。ボーリング大会の景品とかにも使えそうですね! 縮小画像なのでどうでもいいことかもしれませんが、デジカメを新しいのにしました。320x240にはなっていますが、オリジナルは3.2M画素でした。いかがですか?(わかるか〜んなもんって突っ込まれそうです)前のカメラより寄って撮影できるのでありがたいです。あと感度が高いような気がします。おかげで、夜の部屋の中でとっても、結構、ストロボが光らず、自然な感じで写っている気がします。
|
  |
さてさて、ケースから出してみました。写真、ちょっと小さくなりますが、上が「鎮座するオプティカル・センター・ポンチ」、下左は「レンズユニットを装着したオプティカル・センター・ポンチ」、下右は「ポンチユニットを装着したオプティカル・センター・ポンチ」です。 まだポンチしてませんが、ちょっと各ユニットを差し入れてみた感じでは、非常にいい感触です。また、形状もなかなかいいですね!レンズをはめて覗くと、奥の方に十字模様がでっかく見えます。これが不思議なことに結構見えるんですよ。不思議ですね〜。どっから光が入るんでしょう?上から回り込んでいる光だけでみえるのかなぁ? これなら、ばりばりポンチ打ちできそうな気になってしまいます。そろそろG-Tuneの新構造のサンプルを作ってみようと思っていますので、今週末あたりからABS加工に復活したいと思っています。基本的構想はそのままの予定ですが、各パーツをどうやったら強度を維持したまま軽くできるか?というのが課題ですので、いくつかサンプルを作ってみて、手でよじったり曲げてみたりしてみようと思っています。
|
スーパーなんちゃって歩行(1)
非常に恥ずかしいのですが、G-Tuneで使っている「スーパーなんちゃって歩行」について解説しようと思います。前々より、これだけは言わなければ言わなければと思いつつ、今日まで来てしまいました。どうかお許し下さい。
G-Tuneは、いわゆる「なんちゃって歩行」(シーケンシャルに動作を再生していく)なんですが、実は、さらにそれを退化させた「スーパーなんちゃって歩行」をしています。これは、G-Tuneが小型サーボモータで歩く重要なポイントであり、かつ極秘事項(恥ずかしくて人に言えない)だったのですが、自分をステップアップさせるためにも、恥を忍んで公開してしまいます。
このお題は以下の三編で、お送りいたします。
スーパーなんちゃってポイントその1・足首のロール軸(横方向の体重移動)
スーパーなんちゃってポイントその2・腰を落とさず突っ立って歩行
スーパーなんちゃってポイントその3・体重移動開始のひみつ
では、本日は「その1」です。
スーパーなんちゃってポイントその1・足首のロール軸(横方向の体重移動) 足首で体重移動をするというのは、非常に負荷のかかることです。もちろん、人間のようにバランスをうまく取れれば、ほとんど力は要らないはずなんですが、今回使用しているサーボは、そこまでついてきません。簡単に言えば、保持力不足といいますか、そんなに細かく動かせないという感じです。きっと、このあたりはサーボによって(メーカ、トルク、制御方式)によって異なると思います。できれば、パワーはそんなに要らないから、保持力と動きの精度がいいサーボがあればいいなぁと思います。現実的には、保持力アップ→パワーのあるサーボの採用、制御方式がデジタルのものにする、というのが一番簡単な解決方法になると思います。
足首で体重移動をするというのは、非常に負荷のかかることです。もちろん、人間のようにバランスをうまく取れれば、ほとんど力は要らないはずなんですが、今回使用しているサーボは、そこまでついてきません。簡単に言えば、保持力不足といいますか、そんなに細かく動かせないという感じです。きっと、このあたりはサーボによって(メーカ、トルク、制御方式)によって異なると思います。できれば、パワーはそんなに要らないから、保持力と動きの精度がいいサーボがあればいいなぁと思います。現実的には、保持力アップ→パワーのあるサーボの採用、制御方式がデジタルのものにする、というのが一番簡単な解決方法になると思います。
結果として、体重移動して「さあ右足上げるぞ!」という時に、左足首で身体を維持しきれず、左側にそのまま倒れてしまうのです。ここでサーボが0.1度で動いてくれて、かつその時にパワーを出してくれたらいいのですが、うちのは、いくら指示を出してもおよそそんな動きはしません。というのも、この時点でかなりの負荷がかかっているからです。大小傾向はあると思いますが、基本的にはどの小型アナログサーボも同じではないかと。きっとパワーのあるサーボですと、ここで動いたときに踏ん張ることができるのかもしれません。
この図を見てください。この図はG-Tuneの構造を簡単に説明したものです。右の図で屈伸する様を考えますと、上半身の重さは、「長さA」の先で支えればよいことになります(しかも両足で踏ん張るのでサーボ2つ)。力というものは生活の中でもご存知のとおり、力を入れる場所と実際に働く場所との距離が遠くなればなるほど大変になります。もっとちゃんとした計算があるのですが、そこまでスキルが無いので、「力を入れる場所と使う場所の距離が離れるほど力が要る」という程度の説明させておいてください。これを体重移動の方で考えますと、なんと「長さB」の先で上半身を支える必要があります。
屈伸と違い、ここはバランスを取って、実際に必要な力を削減することができる場所です。人間がそうですね!足首だけ考えた場合、体重を横に移動するのに、そんなに力は必要ありません。しかし、そのためには「制御」と「動作」、すなわち心身一体の動作が必要になります。残念ながら、G-Tuneにはどちらも備わっていません。制御はシーケンシャルに再生しているだけですし、サーボは細かい角度動作になるとなかなか期待通りに動きません(デジタルサーボとかの高級サーボになるとどうなるのか、一度試してみたいのですが)。
 そこで、G-Tuneでは、メカニカルストッパをつけることで倒れることを防止しています(せこい!)。メカニカルストッパとは、簡単に言えば、それ以上、機械的に動かないようにする仕掛けですが、これをABS板を両面テープで貼り付けて実現しています。左の写真では、白い板がこれにあたります。上のサーボホルダ部分とこの板が干渉することで、ストッパとしています。簡単に言えば、重心を移動しきったところでメカ的にそれ以上倒れないようになっており、体重移動するときは、一気に勢いをつけてストッパ位置まで動かして、それで支えているのです。というわけで、冒頭の得意ポーズは電源が入って無い状態で保持されています。
そこで、G-Tuneでは、メカニカルストッパをつけることで倒れることを防止しています(せこい!)。メカニカルストッパとは、簡単に言えば、それ以上、機械的に動かないようにする仕掛けですが、これをABS板を両面テープで貼り付けて実現しています。左の写真では、白い板がこれにあたります。上のサーボホルダ部分とこの板が干渉することで、ストッパとしています。簡単に言えば、重心を移動しきったところでメカ的にそれ以上倒れないようになっており、体重移動するときは、一気に勢いをつけてストッパ位置まで動かして、それで支えているのです。というわけで、冒頭の得意ポーズは電源が入って無い状態で保持されています。
工夫といえば工夫なんですけど、柔軟な動きのためにも、早く卒業したいです。
オプティカル・センター・ポンチ到着
今日、Jin
Satoさんから「オプティカル・センター・ポンチ」が届きました。Jin
Satoさん、どうもありがとうございます!SISO-LABで、最も高価な工具です。早く、ポンチ打ってみたいんですが、もう時間が遅いので、まずは明日にでも開封レポートします。お楽しみに!・・・あ、ハンマーないや、買ってこなくっちゃ。かなづちでいいかな???
お、9月になりました。半期決算?(ちょっと早いけど)
SISO-LAB上半期決算?
G-Tuneを作るのにいくらかかったのかなぁと思って、主要部品の購入金額を計算してみました。実際、正確に記録しているわけではないので概算ですが、以下のようになりました。
| アイテム | コメント | 購入価格 |
| サーボ | GWS PARK HPX-BB (12個) | \27,360- |
| ABS板 | 2mm、3mm | 約\3,000- |
| ネジ、スペーサ | いろいろなサイズのもの | 約\5,000- |
| マイコン | Best Technorlogy SH7047F | \12,800- |
| 電子部品 | 実装部品、メンテ用電源等 | 約\5,000- |
| NiMH | GP単3(10)、Nexcell単4(8) | 約\5,000- |
| 充電器 | Nexcell単4単3兼用 | \2980- |
| プロポ | フタバ T4VF | \4000- |
| レシーバ | GWS GWR-4P | \3600- |
| その他 | 接着剤、インシュロック、ラジコン用ジョイント等 | ??? |
「約???円」がちょこちょこありますが、感覚的には、7万円ちょっとオーバーぐらいだと思います。うーん、意外にかかったというのが率直な感想です。ロボットって、サーボが一番高い!(まあ実際高いんですが)という感覚があって、サーボを押さえれば安くできるだろうと思ったんですが、いざ組んでみると、こんな感じでした。言い訳ですが、やっぱ強度を上げたり、本人のスキルの無さをカバーするとお金かかります。
実際にはこれ以外に、焼いたサーボ、買い足した工具(小物ばかりですが、ドリルの刃とかサイズをそろえていると結構かかります)などがありまして、10万ぐらいかなぁって感じです。
次回は、足首と股間だけでももう少しパワーのあるサーボを入れたいなぁ。次回に向けて取れる予算は、フルに使えば5万円ぐらい取れるのですが、いつか完全作り直しのために貯金しなくてはいけないので、3万円の追加投資ぐらいで押さえていくよう、アイデア絞っていきたいです。もちろん、次回目標も今回と同じく、志高く行きます。次回のレギュレーション、どうなるんでしょうか?次は予想が立たないです。
最近・・・
最近、趣味の音楽関係活動を再開(といっても練習だけだけど)しました。お盆休み前までは、ロボット作ってたんでお休みしてたんですよ。やっぱ運動はいいね〜!どんな音楽だ???実は渋さ知らズというバンドが大好きなSISOです。知ってるかなぁ?
それから今日は、妻にせがまれてオリジナルTシャツ作っております。ROBO-ONEのときに、「G-Tune私設応援団」のみんながオリジナルTシャツ作ってくれたんですが、それを見て「オリジナルTシャツがうちでも作れる」ことを知り、今日はレイアウト決めてデータ作ってました・・・。きっと明日はアイロンできるでしょう。こちらは、まだ趣味ではありませんが、もし今回、意外に楽しくてはまったら、ホームページに新しいコーナーが増えるかもしれません。「アイロン比較」とか「Tシャツ転写に最適な半導体温度計の製作」とか、「SH7047FによるアイロンPID温度制御」とか(笑)。