サーボホーン購入 |
DSR/RBS581用ローハイトサーボホーン
1000円分のクーポン券があったのでRTにて購入。ぼちぼちっとフレーム作りなおして入れ替える予定です。
(でもろぼっと焼きも魅力的だった…)

虫眼鏡 |
こんなの使ってますが…まあまあかな。
BBSの方で「ちっちゃいPSoCの半田付け方法」について、こだいらさん
という方から「実体顕微鏡が良い」とのコメントを頂きました(ホームページ拝見させて頂きました。
「Motion」というタイトルを見て、ロボットネタしか思いつかなかった…)。そういえば、
うちでもハンダ付け後の目視用に虫眼鏡を使っています。また、ロボットを始めた頃、
1.28mmピッチのユニバーサル基板にハンダ付けしてみたことがあったのですが、この時は大活躍でした。


コネクタ直付け3Pスライドスイッチ |
これは便利!?(なのかな?)
ふとアイデアが沸いてきて、テスト用試作ボードなどに「ぶすっ」っと挿して手軽に使えるスイッチを作ってみました。
なかなかコンパクトでいい感じですので、作り方を紹介します。マシーンに搭載しているボードにはピンヘッダだけつけておいて、
必要な時だけスイッチを挿して使う、なんてのもいいかもです。

| 用意するものは、「3Pのコネクタ部品一式」と「2.54mmピッチのスライドスイッチ」です。 2.54mmピッチというところがミソです。 |

| まずは、2550コネクタ端子をスイッチの脚に差し込んで、ラジペンなどで軽くかしめます(手で抜き差しできる程度に)。 この時、なるべく端子が小さく収まるようにしてください。大きいと、あとでコネクタに入らなくなります。 3箇所それぞれでやると難しいので、端のピンでかしめて一旦抜き、また次のコネクタ端子をかしめて3つ作ります。 |

| で、この後、スイッチのピンとコネクタ端子をハンダ付けしてしまうわけですが、 スイッチとコネクタ端子だけですと、まっすぐにハンダ付けするのがとても難しいです。 というわけで、ピンヘッダに登場してもらいます。まずはコネクタ端子をピンヘッダに装着します。 この時、全てのコネクタ端子の向きが同じになるようにします。そしてスイッチを差し込みます。 深さは、コネクタのケースのサイズを見ながら調整してください。で、ハンダ付けします。 |

| ハンダ付けができたらピンヘッダを抜きます。こんな感じで、わりとまっすぐにきれいにハンダ付けできると思います。 |

| さいごにコネクタケースにばしっと装着して完了です。使い方は…基板の方に3Pのピンヘッダを立てておいて、 必要に応じてスイッチを切りかえるだけです。これは便利!(本当に使い道があるかどうかは疑問…)。 |
ろぼっと焼きプレゼント中 |
いろいろ
ちょっと遅くなりましたが、TeamOSAKA、ヒューマノイドリーグ三連覇、おめでとうございますー!すごいなー。
不整地を歩くVISIONって、カバーが無しでセンサー追加しているのかなー。足裏に基板らしきものがついているのが見えます。
で、ヴィイストンダイレクトで商品を買うと、
ろぼっと焼をもらえるとのこと(先着)!うーん、何か買おうかなー、買おうかなー。
ふう。なんだかバテてます。会社で仕事をしていると、温度計は30度…。 ようやくゆるりと内緒でエアコンオン。 熱源が多い職場なのでつらいです。あんなコンピュータ(木箱に入って届くようなやつ)、 こんなところに置いていいんかいな?オーバーヒートしないかなー…とか。 エアコンがきつい場所も大変ですが、無いのも大変…。
電線比較 |
芯数っていうのかな。
どうも出張疲れのせいか、夏バテ先取りのせいか、イマイチ、パワーがのりません。とりあえず、
出張はピークを超えたのでしばらくは充電できそうです。というわけで、こんな日は、まったりと電線比較なんぞしてみました。
左が普通にそこらへんで購入した電線、右がネットで、「サーボ用」として購入したものです。見ての通り、中に入っている線の太さと数が違います。


ちなみに何本あるか数えてみました。現物で数えると間違えそうなので、ニッパでブチッと切ってデジカメで撮影、 で、お絵描きソフトに取り込んでマークしながら数えました。30本でした。ちなみにサーボ用としては、 30芯と50芯が良く使われるようです。

「細くてたくさん」の極めつけは、高屈曲ワイヤです。こんな感じです。
出張帰りに見つけたもの |
うぉ、大きい!
というわけでようやく出張から戻ってきました…。帰りの空港で見つけた等身大?(2メートルぐらいです)の
ロボットの写真を一枚。可動部分はなさそうですが、なかなかの迫力です。

PirkusR Type-02・KZR EDITOR |
初めてのロボットコントローラ
PirkusR Type-02用のCPUですが、ていくいっと れいずぃ!のKAZZさんのご好意で、
RCB-1を使えることになりましたので、エディタももちろんKZR EDITORを使わせて頂くことにしました。
実は、既製品のコントローラを使うのは初めて!そ、そういえば、ロボットキットを触ったのは、
PirkusR Type-02が初めてです。うーん、これはこれですごいかもしれません。

ケーブル類まで入れていただいて、本当にありがとうございます。
このKZR EDITOR、ロボットを3Dで表示しながら動作設定をすることができるすごいエディタです。 しかし、KHR-1等、最初から用意されているデータ以外のロボットは自分で作らないといけません。 というわけで、まずは起動してみましたが… 「mscomctl.ocx」とやらが無いとWindowsXPに文句言われました。何かなーと思って、ネットで検索したら、 Visual Basicのランタイムライブラリのようです。というわけで VECTORからダウンロードしてきてセットアップ。 VBとかのライブラリってあちこちでダウンロードできるような気がするんですが、 オフィシャルにはどこからダウンロードするんだろう?とか思いながら無事、KZR EDITORとご対面〜。
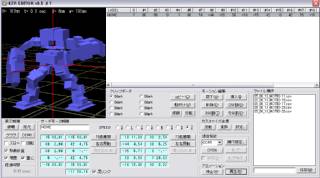
注)デフォルトはYOGOではありません。
まずはデータ作成
特にマニュアルは無いようですので、まずは適当にデータを作ってみることにしました。
基本は、こんな感じです。あ、ちなみに、KZR EDITORはV0.5β7です。
- KZR EDITORの実行ファイルがあるフォルダの下に、ロボットの名前でフォルダを作成。
- 適当なロボットの「home.kpd」、「partsdef.xls」をコピります。あと、 「motion」というフォルダがあるのですが、まだよくわかっていないのでとりあえず後ほどです。
- KZR EDITORの実行ファイルがあるフォルダに、「KZR_EDIT.INI」というファイルがありますので、 これをテキストエディタで編集します。「DEFS」というセクションに、「NUM」というキーがありますので、 単純に定義を追加する場合はこの数値を1つ足し、さらに「E1」とかのキーを追加して そこにフォルダ名を書けばいいみたいです。
- これでKZR EDITORの「カスタマイズ支援」から定義を読み込めるようになります。
- 後は、Excel等の表計算ソフトで「partsdef.xls」を編集し、「CSV形式」で保存したものをKZR EDITORの 「カスタマイズ支援」にて読み込みます。
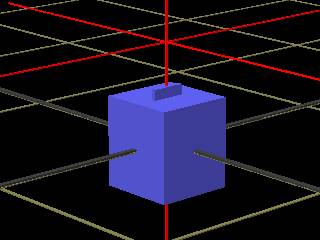
| 他のロボット定義をみると、「箱を設定し、結合情報と、結合部分の相対座標を指定(部品中央からみた座標)する」 ような感じで書いてあったので、まねてちょこちょこと書いてみたんですが…なんか部品が全部固まってしまいました。 これでも数個の部品がありまして、結合部分の相対座標も指定してるんですけど、うーん。 悩む悩む…。 |
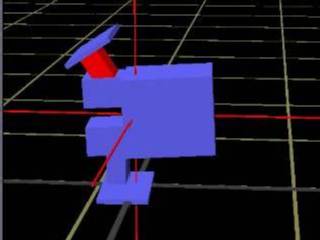
| というわけで1時間ごちゃごちゃやってみてもさっぱりわからなかったので、気分転換で足裏から設定してみました。 足裏は、地面との接点ということで、ちょっと特別な指定をするようになっています。 なんかそれっぽくなってきました。軸の位置はイマイチですが、一応、ちゃんとリンクして動くようになってきました。 だんだんコツがわかってきました。 |
|
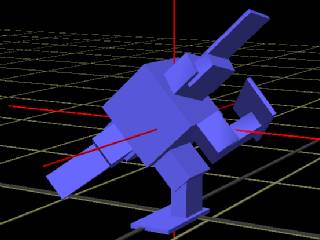
そんなこんなで3時間経過。寸法はすごく適当ですが完成!最初はさっぱり意味がわからなかったんですが、
ちょっとでき始めたらいいペースでできました。 完全に理解したとは言い難いですが、書いては表示して確認、とやっていれば、なんとなーくできるようになります。 まだ画面上で動かせるようになっただけで、ホームポジションや可動範囲の調整をする必要ありですが、 あとは実際に動かしてみればなんとかなりそうです。…そうだ、バッテリを作らないと…。 |
読書・ロボットの天才 |
完読
ここしばらく何していたかといいますと、読書。大和氏の本も何度も読んだし、高橋氏の「ロボットの天才」も今日、読み終えました。
「ロボットの天才」はちょっといろいろな意味で刺激的。ロボット製作とかは直接お話を伺ったこともあり、
またクロイノのかわいさのポイントや軸配置は自分なりに消化しているつもりなので、衝撃ということは無かったのですが、
そのライフスタイルというかライフアプローチというか、そのものに衝撃を受けました。いやー、読み応えありました。
くやしいのはFTのデザインポイントとかが書かれていたこと。自分で解析して納得する楽しみが3割ほど飛んでいってしまいました
(ま、それだけ高橋さんの創るロボットが好きなんですけどね)。というわけで、敬意を表して表紙写真掲載。
実は「ロボットビルダー」っていう言葉ってあまり好きじゃなくて…なんとなく組み合わせ作業っぽいので…「ロボットクリエイター」っていう 方が好きなんですが、高橋氏の肩書きだったんですねー。よし、おいらも新しいのを考えよう。うーん、うーん、「機創師」とか…。ん? 日本語にしただけ?
情報とか新マシーンとか…まったり息抜き中 |
中部練習会
大同工業大学にて中部練習会が07/15(土)午後にあるとのこと。
みんなのやすさん、いつもお疲れ様です。今のところはいけそうですので、このまま予定を入れないようにがんばります。
マシーンは、G-Tune、ARUMO-SiR、どれもっていこうかなー。間に合うかどうかわからないけど、アレもって行こうか…。
フィアスに似てる???
ROBO-ONEの方は、J-Classなら出れそうかなー、という感じですが、ちょっと苦しそう。うーん、今年はダメだなー。

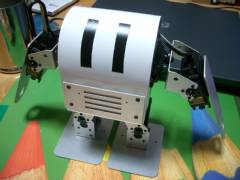
上の写真の正体
上の写真ですが、実はPirkusR Type-02です。以前(2006/05/23)
の不定期TOPICでチラッと書いたのですが、DSR581を安く購入する方法として、PirkusR Type-02をゲットするというのも手だというのを書いたのですが…。
ケーブル色グレーだし、アルミフレームもあるし、フリーホーンもついているし、なんといっても目玉もついているし…

なかなかかわいいパッケージです。

結構、かわいいかもです。

うーん、いいかも。

………作ることにします。
というわけで、約2時間で完成です。まったりと息抜きしながら楽しく作れました。

| まずはPRS-FF09Pです。どどーんと8個ついています。これ以外に、フリーホーン(ベアリング入り)が4個も付属しています。 見てのとおり、ケーブルカラーはグレー&ブラックです。 |

| ネジなどはこのように袋で分けてあり、すべて名前が書いてありますのでわかりやすいです。 |

| アルミフレームパーツです。意外に多いです。内部補強フレームとかもついていて、それで多いというのが後でわかりました。 ちなみに、組み立てマニュアルは付属CD-ROMに入ってます。 |

| サーボの裏フタ側のホーンの取り付けです。ホーンごと取り付けると、押し込み具合がわからないので、 一旦、ホーンを差し込んで抜き取るとベアリングだけ残りますので、この状態で押し込みました。 |

| ちょっと見づらいですが、ほんの少しだけベアリングの頭が飛び出ているのがわかりますでしょうか? だいたい、このあたりまで押し込むといいみたいです。 |

| 電源スイッチは2つ入ってまして、マイコン用とサーボ用の電源に対応できるようになっています。 スイッチは「6A.125V.AC」と書いてありました。サイズのわりに容量は大きい方だと思います。 |

| というわけで、ここまでで2時間で完成。割と説明書を読みながら(事前に読むほうがもちろんいいんですが) のんびりやったんですが、さくさくっといけました。説明書、かなり丁寧に書いてあります。 |

| お尻の方はスイッチが2つついてまして、さらにサーボ電線を引き込むための穴がついています。 できあがってみて、結構、電線がすっきりしているのがいい感じです。 |

| 肩もこんな感じで電線が引き込めるようになっています。 |

| 内部はお腹の方にバッテリーを収納するスペースがあり、頭部?がマイコンスペースに使えるようになっています。 マイコンスペースの台の部分はいろいろな穴があいてます。ひょっとしてRE001とかだったら、すぽっと入るのかな? フレーム作り直して、もっと華奢にしちゃおうかなー。 |

かわいい…
黒い板探してきて、ほんとにフィアス似にしちゃおうかなー。
組み立てていて思ったことは…
- サーボホーンは、POM(PRS-3401についているやつとかがそうだと思います)製に比べると、ネジ穴がちょっと弱い感じです。 ネジ穴、タッピングビスでもたまに、ふにゃっと馬鹿になってしまうことがあります。そんなわけで、ゆっくりめ(あまり 温度を上げないように)にねじ込むと良いです。
- サーボ裏蓋フリーホーンを取り付ける場合、上の方の写真ぐらい、ぐいっと押し込みます。ホーンをつけたままだとわかりにくいので、
軽くホーンを押し込んでから抜くと、ベアリングだけ本体側に残りますので、それをぐいぐい押し込む方が間違いなさそう。
これが浅いのに気づかずにネジを締めこむと、ネジ穴まわりがバキっと行きます。
なんとなくケースの硬さも違うような。PRS-3401って高いサーボなんだなーと思いました。 - 足裏がネジ頭が少しでるけど、何かまちがったのかなー。クッション貼るつもりだからいっかー。
- 手がマジックテープでの固定なので、バトル用にはカチっと固定できるようにしたほうがいいかも。
マイコンは何にしようかなー。最近マイブームの「直付け」(不定期TOPICの 2006/04/30 を参照してください)でいってみようかな。もし、TSC16ベースで「お気楽手抜きでPirkusR Type02を動かそう」なんてやったらウケるかな? (TSC16 …Tiny Servo Controller 16の略で、多少のジッタは無視して、H8/3664で手軽にサーボを動かしてみようというものです。)
追記:まだ通電せずにごにょごにょいじってますが…これぐらいの足裏位置の方がいい感じがします。足裏にネジ穴が4つ開いていたので、 ひょっとしたら簡単に付け替え可能かな?と思ったら、残念、それはできませんでした。ま、おいおい試してみます。
PSoC追加情報
PSoCで思い出してチェックしてみたら、W-FIELDさんのところでも増えてました。
いやー、ラインナップが豪華だなー。使いたいアイデアは既にいくつかあるんですが…よし、とりあえず1つ買ってみよう。
秋月でPSoCのラインナップ増えてますねー |
のんびり部屋片付けてます
どうもこの間の出張で体調をかるーく崩したみたいでなんだか寝てばかりです。どうもホテルの枕が合わなかったといいますか。
そんなわけで、部屋を片付けたり、まったりとインターネットふらふらしてます。
秋月電子で、CY8C27443-24PXIとかCY8C29466-24PXIが取り扱い開始になってます。何かのついでに買ってみようっと。
で、非常に気になっているのが、CY8C29666-24LFXIというPSoCです。
とにかく小さい。データシートを探してみたら、0.5mmピッチのようです。
しかも、チップ裏側の中央に大きな端子らしきものがあるのですが、これもグランドに接続しないといけないようなことがデータシートに書いてあるんですが…
どうやってハンダ付けしたらいいんだろう???