サーボホーンのはずし方(by 吉村さん) |
おー、はずれるはずれる♪
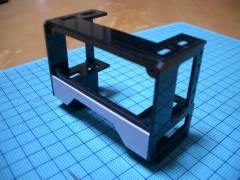
ARUMO-SiRの腰ヨー軸に使っている、浅草ギ研さんのアルミサーボホーン、はずしたくてもはずれないぐらいガッチリはまっているんですが、
取り付け位置が思った位置よりもずれていたので、一旦はずしてはめなおすことにしました。
とはいっても、手では抜けそうも無かったので(板でもつけて引っ張れば抜けそうですが、どっか壊しそう)、
吉村さんが紹介してくださっていた
「外れないサーボホーンの抜き方」を参考に抜いてみました。

|
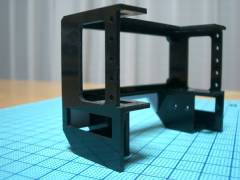
まずはM3のビスをはめます。手持ちであった中で、一番傘が大きかったので、トラスネジを使っています。 本当は、六角の穴のあいたやつが良かったんですが、手持ちに無かったので。 |

|
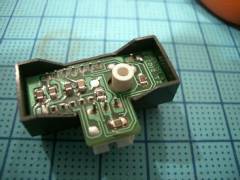
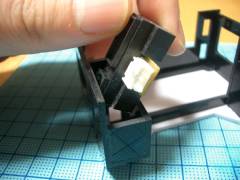
で、アルミサーボホーンにM2の穴を空けるのがもったいなかったので、標準でついている十字の樹脂ホーンを装着しました。
ホーンにあいている穴は、2mmのドリルで大きくしてあります。 浅草ギ研さんのアルミサーボホーンは、径の小さい方のサイズですので、2本のM2ネジで固定しました。 あと、向きがひっくり返っていますが、普通の向きにすると、ドライバーがM3のネジまで届かなかったので、 こうやって取り付けています。これだと、普通のドライバーでも回せます。 で、ぐりぐり回していくと… |

|
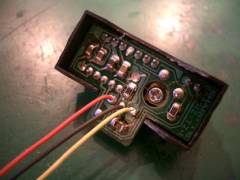
おー、無事、外れたー。やさしく外れました。 |
吉村さん、どうもありがとうございましたー。
SIPHA CORE改・ARUMO-SiRに組み付け |
あれ?ヨガしてる…
昨日は基板作って寄り道してしまったので、今日はまじめにARUMO-SiRに取り組みました。
寄り道は目標到達への最大の敵。でもホビーストの醍醐味…
で、改良の済んだSIPHA COREをARUMO-SiRに組み付け、サーボケーブルやらセンサケーブルを差し込んで電源オーン!
あれ?
うーむ、ケーブルを挿し間違えたらしい。うー、どこだ〜???
端子台に発して…
配線少ないといいですよねー。フレームにパターン入れてフレーム間をつなぐかー。サーボをチェーンでつなぐのは、
このイメージに近いですよね。
初めての基板作成 |
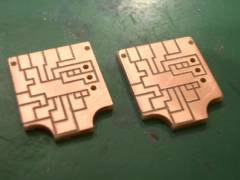
基板作ってみました。
初めて基板を作ってみました。ユニバーサル基板ではよく作ってますが、こういう銅箔のついたものでは初めてです。
PRX-1510で作ってみました。まだ、導通チェックぐらいしかしていないのですが、ちゃんと動くところまでいったら、
手順も含めてアップしますのでお楽しみに〜。
ASURADAさん、ご指南ありがとうございましたー。
というわけで、作ったのはこんなもの。シンプルなものです。何の基板かなー。
端子台に発して…
端子台に始まったJinSatoさんところから話題リレー。
基板を作ったところから新しいネタを思いついたので、思わず続けてみたりします。(^_^;
ガラスエポキシとかの丈夫(どれくらい丈夫かはわかんないですが)な基板にパターン作って、 表面実装部品をつけて、それをそのままフレームにしてしまうってのはどうでしょう?で、電源ラインもあって、 各サーボはネジ止めするとそのまま給電され、各パーツ実装フレームは、マイコン、センサー処理などで別れていて、 体内ネットワークで通信できるようになっていてフレーム間を通信ケーブルとパワーラインで接続して…おお、 これって究極の省スペース?(いや、単なる趣味)マイクロマウスって、フレーム兼用のもありますよね。 たわんだときにパターンが切れちゃうかな?それより厚い(強度のある)ガラスエポキシ基板なんて無いかな。
ボディに表面実装したロボットを製作されている方のホームページは見たことありましたが(たしか、 JinSatoさんのホームページ経由で見たと思います)、フレームはまだ無かったと思います。
(この話題リレーは、不定期TOPIC 2006/03/26の 「端子台」、JinSatoさんとこの開発日誌・2006年03月27日、 不定期TOPIC 2006/03/28の「ターミナルブロック」、 JinSatoさんとこの開発日誌・2006年03月28日と読んでください)
今日のノート・秋月のキット取扱説明書回路図集 |
今日のノート
「AKI-H8/3694の回路図、どこにやったかなー」と手元のものを探すのがめんどくさかったので、ふとネットで検索したら、
「秋月電子通商キット取扱説明書回路図集」
というのを発見してしまいました。これは便利です。
ついでに「ニッケル水素電池の容量アップの問題点について」
という記事も発見。へー。というわけで、NOTEへ追加。
2.54mmピッチのターミナルブロック
JinSatoさんの「開発日誌2006年03月27日」にて、
ターミナルブロックの話が!へー、2.54mmピッチのターミナルブロックってあるんですねー。情報、ありがとうございますー。
こっそりメモメモ…(DigiKeyの277-1273)。
写真もあります。小さそうですが、しっかりした感じです。ちなみに、
秋月で売っている
ターミナルブロックは未確認ですが、写真からして5.08mm(3PIN分)っぽいです。
ストロベリーリナックスさんとこの
端子台は、
5.08mmピッチと書いてあります。
でも、端子台とフレーム固定するネジを兼用にすると、アルミフレームは危ないんじゃないでしょうか…
2mmゴールドコネクタの続き
SIPHA COREへの電源をこれに変更したのですが…考えてみたら、動作テスト用電源ケーブルのコネクタも変えないといけなかったです。
手持ちの残りがあと一組しかないというのもあるんですが、容量的には片方だけ給電できればいっか…ということで、
こっちも製作。うー。
SIPHA COREのアナログ3入力対応改造完了
うーん、はまりました。現在、SIPHA COREをARUMO-SiRから降ろした状態でテストしているのですが、
なぜかSIPHA TERMと通信エラーでまくり。シリアル通信キャプチャソフトを入れてチェック(プロトコルアナライザみたいなもので、
ドライバをフックしてデータを表示してくれます)しても、なんか無通信時間があります。うーんと悩んでCPU替えてみたり
EEPROMを替えてみたんですが、ようやく解決。
以前、リポバッテリ用に電圧管理をする機能を追加したのですが、これをイージーに入れすぎました。
単体の時は、5.5Vの電源を使っていたのですが、電圧チェックに引っかかって、パワーダウン処理が走っていました。
そんなわけで、指示モード(通常、無線操作とかで使っているモード)のみ電圧降下検出をするようにし、
復帰時、前の状態が指示モードだった場合のみ復帰させ、そうでない場合はそのまま、
SIPHA TERMからの指示を受け付けるだけのモードに固定するようにしました。

で、ようやくこれが片付いたので、ちょちょっとソフトを直して動作確認OKしました。スケジュール、ちょっと遅れ気味。 やばいなー。なんか値がフラフラするなーと思ってたら、3入力対応したのに1入力しかセンサを接続していなかったのが原因でした。 使ってないアナログ入力端子は、ちゃんと処理(グランドに落とすとか)しておかないと値が安定しません。 改良する前は、短絡用のコネクタをつけていたんですが、降ろしたときに外して、すっかり忘れてました。 もともと、これ以外に加速度センサ2入力と電源電圧監視で1入力なので、全部で6入力です。
そういえば、H8/3664のアナログ入力、連続スキャンのうちの1端子をグランドにしておかないと、値が揺れる (正確には別のセンサの値に引きずられるように結果がずれる)という現象があったんですが、H8/3694では実験してません。 実際のところ、どうなんでしょう?
2mmゴールドコネクタ |
ゴールドコネクタに取り替え
今まで、SIPHA COREへの電源供給は、2Pのピンヘッダでおこなっていたのですが、これって確か3Aぐらいが定格だった気がします。
さらに以前、動作中に抜けかけて発熱〜発煙までいったことがありましたので、万全を期して基板からケーブルを直出ししました。
とはいっても、はずせないと何かと不便ですので、2mmゴールドコネクタで接続するようにしました。
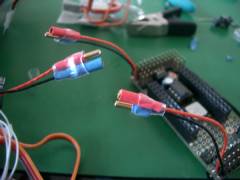
どっち向きにつけたかですが、一応、給電方向から見てプラスがオスになるようにしています。 また、熱収縮チューブですが、ブルーとピンクのものがΦ3で、クリアのものはΦ4.8を使っています。 2mmゴールドコネクタといっても、Φ2の熱収縮チューブが使えるわけではありませんでした。 リポから出しているコネクタの、JSTコネクタと比較するとちょうどおなじぐらいの大きさになりますので、 容量のわりにかなりコンパクトになる、という感じです。
でも、2mmゴールドコネクタを使った理由というのが、「JSTコネクタより小さくなるだろう」というもくろみでしたので、 ちょっとがっくし。容量的には、もう1つ小さいタイプでもよかったかな。小さいかどうかわかんないんですが、 ディーンズマイクロコネクタというのがあります。これだと11Aぐらいまではいけるようです。 いつものJSTコネクタは6Aぐらいまでのようで、2mmゴールドコネクタは20Aぐらいまでいいらしいです。 そんなに高いものでもないので、何かの折に試しに買ってみようと思います。

ところで、基板に電源(サーボ用)を入れるのに、秋月等で売っている ターミナルブロックとかよさげなんですが、どうなんでしょう?今回、使ってみたかったのですが、基板にスペースがなかったので見送りました。 写真で見る限りですと、あとはストロベリーリナックスで取り扱っている、 端子台もよさそうです。 こっちは、ちゃんと定格300V13.5Aと書いてあります。E001についているのと同じものかな?
「吉野のロボット製作日誌」到着
というわけでさっそく読み始めました。お恥ずかしながら、吉野さんのホームページを見させていただくときは、
やっぱり二足歩行の話とか、サーボ制御などの基礎技術の話をよく読んでしまいますので、
W6とかの方は改めて見るとおもしろそうだなー。それぞれの内容も、結果フォローとかコンセプトの話などが含まれていて、
読み物としてもいい感じです。勉強したくなっちゃいますねー。なんかW6-V2の話を読んでいたら、
レスキュークローラー工作キット
とか買って、ガンヘッド風のもの(あれはタイヤですが)を作ってみたくなってきてしまいました。
(んで、G-TuneやARUMO-SiRと合体する…)
吉野さんの本で思い出しましたが、もし、これから二足歩行ロボットを作ってみたいけど、自作がいい、でも初心者、 という方に、すごいオススメの本があります。それは、 二足歩行ロボット製作超入門 です。作るのは4軸ロボットですが、ロボット製作に必要な「いまさら人に聞けないような基本要素」を、 これだけしっかりと網羅している本は見たことないです。さすが、浅草ギ研!って感じです。どう作り始めていいのかわからない、 という方は、ぜひ読んでみてください。とても近道です。
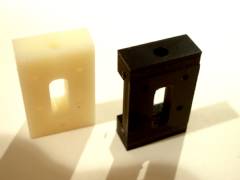
シャープ距離センサ・GP2D12の取りつけ |
ミミ切ってネジ一本で取りつけ
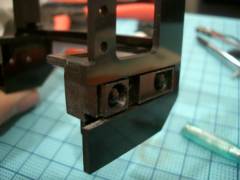
G-TuneやARUMO-SiRでは、シャープ距離センサを取り付けていますが、ミミは削ってしまって、ネジ一本で固定しています。
取り付けに使うのは、12mmのM2ネジ(固定する板が2mmの場合)と6mmのスペーサです。

センサをひっくり返すと、基板とケースを固定しているM2のネジがあります。これを使って板へ固定します。 このネジを一旦はずし、6mmのスペーサをのせます。このスペーサはM2用のもので外形4mmです。

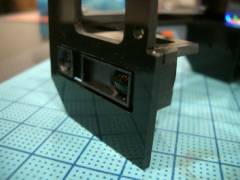
この状態で裏側からM2L12のネジをねじ込むと、ちょうどよくはめることができます(6mmだとちょっとだけ長いんですが、 だいたいいい感じです)。非常にコンパクトに固定できますので、ぜひともお試しくださいな。

ちなみにこの距離センサ、厳密に計測したことはないのですが、結構、電流食います。瞬間的には100mA近く流れることがあるようです。 そんなわけで、電源回路の容量には要注意です。あとは、距離センサの電源端子間に、10uF程度の電解コンデンサを入れています。

ロボットバトル in 大同工業大学&ロボファイト3へ向けて |
今後の予定
ARUMO-SiR(最近、G-Tuneはどうしているかというと…いつでも稼働状態ですので御安心を)をこまこまと改良していますが、
現在ターゲットにしているイベントは、4/15 ロボットバトル in 大同工業大学と
5/3 ロボファイト3(SRC)です。名古屋でARUMO-SiRを動かすとなぜか煙を吹くので
(名古屋モーターショー、練習会共に煙でてます…すいません)、次こそは煙が出ないよう改良します。
で、大阪では、どうも活躍度がイマイチですので、ここらで挽回できるように、動作を見直したいなーと思っています。
というわけで具体的にはこんな感じ。ここ1ヶ月半の作業目標です。
- SIHPA COREとサーボ電源は、2Pのコネクタで接続しているので、これをケーブル直出しに変更し、
ゴールドなコネクターで体内配線と結合する。
ちなみに以前発煙した原因は、 サーボの使いすぎと電源コネクタが抜けかけて抵抗値があがりハウジングが溶けた、です。 いや、お恥ずかしい。ご心配、ご迷惑をおかけして、重ね重ねすいません。 まさゆきさ〜ん、今度は直出しにしますからねー。 - 距離センサを2つ追加し、役に立つようにSIPHA COREのファームウェア、ハードウェアを変更。 うまく使えるか不安はありますけど、ま、まずはいろいろやってみます。
- 頭サーボ(RB50)が、電源電圧高すぎでプルプルするときがあるので、ここだけダイオードで降圧する。
- 操作系は、さらに直感的な操作に見直して、あと一声のスピードアップを図る。
- 格闘姿勢は、「右が前」という概念で作られているので、これを左右どちらも前になれるよう機能追加する。
- 移動速度をもっとアップする。
- 形だけの攻撃が多いので、身のある攻撃に修正。
- ロボファイト3向けに有線コントローラの開発。
その他、今後半年間の活動目標としては…
- PRX-1510用の防音ケースの製作。
- SISO LABの整理…早いとこ整理してきれいな環境にしたら、About SISO-LABを更新するぞー。
- サーボ22ch対応のSIPHA CORE改良。分解度を下げてでも22chを目指す。
2006/03/24追記:と書いたものの、森永さんがサーボの分解能を256→16384ステップへ変更されようとしているのを読んで、 やっぱり分解能を下げずにやる方法を検討することに…。ちなみに、今のSIPHA COREは0.8us単位です…のハズです。たぶん。 でもバグがあって、あるパターンに陥るとピクピクします。これも直さないとなー。 - PSoCでアナログセンサを管理し、メインマイコンに接続。I2C、できるかな?
- 新型G-Tuneは…まだコンセプト悩み中なので、わからないです。現行コンセプトで行くか、次世代安価コンセプトで行くか、 はたまた…。ATmega128+PSoCサーボドライブというのも考えたんですが、積載スペースが苦しそうです。
- M16、ATmega128で遊んで、次期SIPHA COREアイデアを練る。ATmega128、マニュアル読んでますけど面白そうですよね。
- PS2コントローラでワイヤレスというのもやってみたい。やるなら8PINのPSoCで管理して、 それをメインマイコンに流し込む形にしてみたいです。省スペースにもなりますし。 ATmega128とかなら、そのまま接続するのもありかもです。
う、結構、ありますね…
吉野さんの本
ふと、王国を見たら、吉野さんが本を出されているではありませんかー。
買うぞー。今度、吉野さんに会ったら、サインをもらおう!特ダネだーと思ったら、既に紹介しているところが…。あうあう。
吉野さんといえば、とにもかくにも勉強させてもらいました。また、初めてROBO-ONEに出た(第4回)時にも声をかけていただいて、
いろいろとご指南していただいたこともあり、自分の中では教祖さま的な存在だったりします。
新バックパックカバー・作ってみたけど…の続き |
うーん、一進一退
というわけで、距離センサが入らないという訳で、せっせこ当る部分をヤスリでケースを削りまして、ようやく入りました。

ところが…今度は固定できないことが発覚。距離センサのミミは取ってあるのですが、実は、裏側からネジで固定することができます。 この方法については後で書きます。そんなこんなで、ケーブル当りやらなんやら修正して、結局、こんな感じに落ち着きました。 距離センサのところはスライドして押し込むようにしました。つまり、今までの距離センサへの加工はまったく無意味になってしまいました。とほほ。


うーん、ちょっと距離センサまわりの強度が心配…ま、ABSはやわらかいから大丈夫かな。 というわけで、ひさしぶりにすべてのケーブルがはずされたSIPHA COREです。 ケーブルにいっぱいテープが貼ってありますが、これは、もともとどこについていたかが書いてあります。 自分で作ったものとはいえ忘れてしまいますので(しかも整線してあると、どこから来ている線かわかりにくいし)、 こんなふうにマークしながらやっています。後はSIPHA COREのハード&ソフトをちょっと改造したらとりあえずOKかな。

なんだか3歩進んで2歩下がってますけど、 ロボット・バトル in 大同工業大学に、マジンガアJr.も参戦とのこと、気合入れていこー。 他はどなたがエントリーされているのかな?みんなのやすさん、 選手一覧まだですか〜?
ホームページ整理 |
不定期TOPICへのリンク完了
前々からやりたかった各不定期TOPICへのリンクを完了しました。ふー、大変だった。以前、
「タグはり完了〜」と報告させていただきましたが、
せっかくなので、日付のところをリンクにしました。もし、御入用であれば、日付のところのリンクを使って参照していただいて結構です。
人形つかいさん、これで大丈夫ですか?
新バックパックカバー・作ってみたけど… |
ROBO-ONE・うずうず続く
はー、今日もなんだかうずうずしています。きっとすごい戦いが繰り広げられていたんではないかと。
今日も光子力研九所さんをマメにチェック。
昨日より更新は少ないですが、優勝したとのこと。おめでとうございますー。
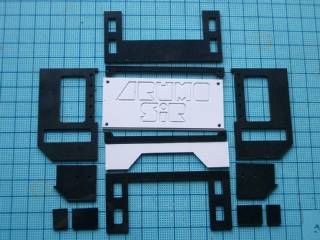
バックパック接着完了
先日切り出したバックパックを接着組み立てしました。接着、だいぶきれいにできるようになってきましたが、
まだ、C:olonさんレベルには到達していません。時々はみ出して汚くなってしまいます。でも、いい感じになってきました。

なかなかメカ好きにはそそる感じに仕上がりました。実はちょっと設計ミスがあります。「ARUMO SiR」と彫刻してある板の縦方向が2mm足りません。しょうがないので、フレームのほうを斜めカットして、「最初からこういうデザインを狙ってます」という風にみえる?
修正をしています。
接着はけっこう気軽にできるんですが、接着していく順番は少し頭使います。
今回、接着用のガイド溝みたいなものはまったくつけなかったんですが、精度良く接着するには、やっぱりあったほうが楽そうです。
でもまあ、見れる感じにできたので良しとします。
ふと、一抹の不安が…いや、けっこう大きな不安が…
ここに距離センサをはめる予定なのですが、はめる方法をまったく考えてなかったような…

ガーン、ここまでしか入りません。

ひっかかっているところを削ってみました。
う、やっぱり全部入りませんでした。うーん、どうしようか?側面フレームの写真上側のところを切って開いちゃおうか。 でも、強度がさがるかなー。うーん。設計するときは、ちゃんと組み立てのことも考えないといけないですねー。 距離センサのケースをもう少し斜めカットしてみようと思います。
赤いマイコン・BTC068 |
ROBO-ONE・うずうず
ああ、昨日からROBO-ONE。なんだかうずうず。昨日はなんだか落ち着かない状態でお仕事してました。
今日もホームページチェックしたり。光子力研九所さんにて、
速報の勢いでBLOGを更新してくださっているので、ちょこちょこチェックさせていただいています。
BTC068/ATmega128
Best Technologyさんの
ATmega128 CPUボードを買いました。
前から気になっていたんですが、サイズが小さく(30×39)、なんと外付けSRAM(32kByte)が実装されています。
それでお値段、4,500円。なかなかお買い得な感じです。とは言ってもSRAMを使うとI/O点数が少なくなるので、
どう使うかは悩みどころですけど。PSoCと組み合わせて使うか、それともSRAM切り離してソフトドライブでサーボ制御するか、
はたまたCPLDとかに手を出してみちゃったりするか…(^_^;
ぼちぼち使ってみて、いろいろ考えていこうと思います。
そういえば、もう今って、CD-ROMついてないんですねー。あまりにもパッケージが小さいのでちょっとびっくりしました。 あと、商品カタログのところにもありますが、通信ケーブルがついていません。すっかり忘れてました。 何か適当なもので作ることにします。ん?そういえば、前に使っていた、SH7047ボード用のケーブルがあったかな。 たぶん、あれと同じです(ピン間の距離が2mmピッチっぽい)。
今使っているH8/3694は、コスト&性能、すごくいいCPUです。しかし、今後、センサー類を増やしていこうと思うと、 「シリアルがもう1つ欲しい」とか、「もう少しROMが欲しい」ってのがありまして、ちょっと性能に欲がでてきました。 この条件を満たせるボードとしては、以前、購入したOAKS16-MINIとか、 BTC065というH8/3687が載っているボードもあるんですが、ATmegaは、まだ触ったことが無いので興味もありまして、これを購入しました。
当面、H8/3694でさらに改良はしていきますが、今後、現行SIPHA SYSTEMレベルの「操り人形統合管理+操縦者補助」から、 もう一声、「操縦者補助」の部分をレベルアップしたものを考えてみたいと思っています。
ちなみに、「SIPHA」は「SISO JUNK STUDIO (LAB) INTELLIGENT PUPPET HANDLING ARCHITECTURE」の略で、 「SISO製ちょっと賢い操り人形管理機構」の意味です。
SH等を選択しない理由は、やっぱサイズと消費電力です。G-TuneやARUMO-SiR等のコタツトップサイズですと、 制御ボードのサイズもバカにならないですし、CPU用にバッテリを余分に積むことは避けたいところで、そうなると、 このあたりのCPUがちょうどいい感じです。

新バックパックカバー削りだし完了 |
お祭り前でそわそわ…
いよいよ明日から、ROBO-ONE J-Class、ROBO-ONEですね〜。みなさん、がんばってください。
SISOは不参加ですが、やっぱ、参加される方のエネルギー放射に反応してしまって、手を動かしたくてしょうがない状態です。
そんなわけで、バックパックに距離センサを搭載するべくバックパックカバーを作り直しています。
切りだしは、F300(300mm/min)、切りこみ0.3mmで全部で1時間半ぐらいです。 切りこみ量は、だいたいいつも0.5mmでやっているのですが、1mmのエンドミルだと切子がつまりやすそうなので、浅めにしています。 ABSはゴムっぽいので、CNCにとっては結構やっかいです。アクリルやPOMだともっと楽チンなんですよね。
切削スピードですが、 PRX-1510、F1000までいけるので、そのうち新NOTEPCにMACH2等をセットアップしてやってみようと思ってます。 今使ってる、古いPCでもF1080までは動かしたことはあるんですが、円とかを組み合わせると、PC側が追いつかない感じで脱調しちゃいまして、 今のところ、いつもF300、空中移動F600ぐらいで動かしています。
というわけで削りだした部品はこんな感じです。
「ARUMO-SiR」の文字を彫刻してみました。CADで普通に線で書いた物を、G-Codeでトレースさせただけですが、 結構いい感じに仕上がりました。後は、接着で組み立てます。
トランジスタ技術4月号 |
CPLD MAX II ALTERA
「CPLD基板がついている」ということで気になっていた、トランジスタ技術4月号をついつい買ってしまいました。
気が向いたら勉強しよう〜っと的なノリで一冊。HDLってのも書いたことないんで、入門用にちょうどいいかな〜と。


ん?手持ちにDSUB25Pなんてないしケーブルも無いです。3.3Vのレギュレータもないな〜。 こういうのって、パラレルポートを使うんですね。いまどきのノートPCにパラレルポートなんて…ふっふっふ、 うちのニューノートPCにはあるんですよねー(HP nx6120/CT)。うん、これを買ってよかった。 今度、秋月に何かオーダーするときに、一緒に購入しておこう。
Interface 6月号
で、トラ技を読んでいたら気になる記事が!
Interface6月号には、SH2が付属!
4月25日発売とのことです。SH7144Fに、レギュレータ、RS232Cポート、リセットIC、 それにSRAM実装用のパターンもあるようなことが書いてあります。これは大人買いか?(いや、しません… 評価用に1冊買うぐらいです)
距離センサを追加したいんだけど… |
う〜ん、スペースが無い
ARUMO-SiRには、シャープの距離センサ(王国とか売ってるアレです。)を頭部に内臓していますが、
さらにもう2つ追加しようと悩んでいます。しかしスペースがありません。最初は胸につけたかったんですが妥協して、
このあたりはどっかなー…やっぱり入りません。

めんどくさいのでミミは切りたくなかったのですがやっぱり切ることにして、 バックパックごとデザインを見直すことにします。積載スペースは小型機の悩みです。
手抜き腰ヨー軸受け |
お手製スラストベアリングの代わり
腰ヨー軸、サーボが新品の時はいいんですが、ちょっと使っているとプルプルする…ここは、肩とかを支えており、
しかも直立時、負荷がかからない部分なので、あたりまえといえばあたりまえなんですが、そんなわけで、フリクション稼ぎもかねて、
お手製スラストベアリングをはずして、ABSで作った受けに換装しました。

作ったのはこんな部品です。ABSの輪に溝が入ってます。たぶん、接触面積を少し減らしたほうがいいかなーと思って溝を入れたのですが、 なくてもいいような気もします。これにグリスを塗ってはめておけばいいかなーと。


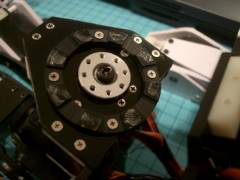
ばらしてみると、ボールを受けていた部分、意外とへこんでます。結構、負荷があるもんですねー。ということは、 新パーツだと、焼きついたりしないかなー。右の写真が新パーツに換装したものです。グリスは、いつものチタングリス(タミヤのです)。 ちょっと動かしてみましたが、いい感じです。これで様子見しよっと。
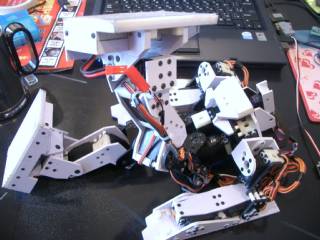
おまけ
おまけでARUMO-SiRの胸の中の写真なんぞ。頭の下にある緑の物体は「方位センサ」、その下は「ProBo受信機」、そして両サイドはサーボ、
というわけで、ぎっちりです。サーボの下に、5mmほど隙間があるんですが、何かセンサーとかで、いれるのにちょうどいいものないかなー。
小型だと、積載スペースが悩みなんですよねー。「数ミリの隙間」とかはちょこちょこあるんですけど…。

接着肩フレーム・その後 |
まったく問題なし
前に作った肩フレームですが、
とても快調で、中部集会でもまったく問題なく現在に至ってます。接着も多少は上手になってきた感じなので、
だんだん接着部品も増やしていこうと思います。接着が使えると、メンテするときの部品点数が減りますので、
何かと気が楽になってきます。それにしても、この肩フレームなんて、3mm幅でくっついているだけなんですけどね。
すごいもんです。それだけに、なんで今までトライしなかったんだろう〜と悔やまれます。


接着版MICRO-MGサーボジョイント試作
というわけで、接着を使ってMICRO-MGサーボジョイントを試作…というか、現在、訳あってG-Tuneの脚が分解されており、
サーボジョイントが足りないということで、作ってみました。とりあえず上下面だけ必要な部品なので、PRX-1510でちょちょっと削ってあとは接着。
本当は、うまく部品を固定して切削で同じものが作れればいいのですが、まだそこまでスキルがないので、今後も精進あるのみです。

ONOさーん、おいらも「ジェッターマルス」歌えます。エンディングも歌えるかも…。思えばあの頃は記憶力抜群でした。
マシーン・デザイン |
G-TuneとARUMO-SiRの共通点
たまにはデザインの話なんぞ。よく「G-TuneとARUMO-SiRは似ている」と言っていただける(うれしい〜)のですが、
いくつかの共通点があります。1つは、ABSの板材が多用されているということ、もう1つは、ネジが多い(^_^;…。
で、最後なんですが、色使いが同じ、ということが上げられます。
以下の3つの絵を見てください。全てサイズは同じで、色使いを「白」、「黒」、「白&黒」としています。



G-Tune、ARUMO-SiRともに、一番右のカラーリングをつかっています。理由としては、「本当はのっぺりとしたボディが、 メリハリがあるように見える」ためです。黒より白の方が明るいため目立ちます。若干ですが、その分、大きく見えます。 逆に、黒は小さく見えます。特に、背景がリングなどの白色基本だったり、スポットライトで照らされている場合、 より顕著にこの傾向がでます。この「目の錯覚」を利用して、形状にメリハリをつけるのが狙いです。
「ウェストがキュっとなってて、手足太目」が好みなので、ボディ中央部分や手足の先の方を白色に設定しています。 子供の頃観ていたアニメとか、マクロスのバルキリーとかがそんな感じで好きだったので、より、そのイメージを強調できる、 この色使いを選びました。 ちなみにガンダムって観たことないです。でもろぼっ子ビートンとかジェッターマルスはわかります。
「ウェストがキュっとなってて、手足太目」?それって、なんか…別の世界から呼ぶ声が…
Boston Dynamics BigDog |
こりゃーすごい!
我が友G氏よりメールが…Boston Dynamics社のBigDogがすごい!
(やじうまWatch【2006/03/06】経由)
Boston Dynamics社のトップページからメニューで「Robotics」−「BigDog」と進んで、画面右下にある動画を見てみてください。
こんなのあるんだー。しかも動きが妙にリアル!?「犬」というよりは「牛」な気がします。
動きはちょっと不気味なぐらいすごいです。不整地もモノともせずひょいひょい歩いて行きます。しかも、 接地している脚は2本。しっかし、きっと開発費もかかっていると思うんですが、こんなに派手に蹴っ飛ばしてもいいもんでしょうか?
兎姉さん、セグウェイいいなー。 これもどうですか?…乗れるものなのかな?
アルミプレート |
厚いアルミプレート(A5052)
オリジナルマインドさんで、いつのまにやらA5052の取り扱いが開始されてます。
厚みは8/10/12/15/20mmから選べてサイズは指定できるようです。サイズを入力すると値段が表示されます。
価格に小数点が出る時があるのはご愛嬌?ジグを作るときとかにちょうどいいかも。どうもCNCを購入してから、
この手の情報に敏感になってます。う〜む、やってみたいことばかり増えていく。
「治具」は当て字ということを今日初めて知る…
次のターゲットは… |
ぼちぼちっとね。
ROBO-ONEまで2週間切りましたが、みなさん調子どうでしょうか?既に次回の第10回ROBO-ONEの話が出ていますが、
やっぱり9月ですかー。うーん、またダメだー。遠いってのも結構な問題なんですが、いろいろと。
できれば、8月にJ-Classと軽量級クラスのROBO-ONEがあったりなんかするとうれしいんですが…
軽量級、話があがらないようですけど、J-Classに含まれていくんでしょうか。うーん。
近隣のイベントというと、4月15日にロボット・バトル in 大同工業大学、 5月3〜5日にロボファイト大阪3がありまして、いいですねー。 ロボット・バトルの方は参加表明しました。鉄人も来るのかな?ロボファイト大阪3も出るつもりで検討中です。そういえば、ロボット・バトルのレギュレーションって、 どんなレギュレーションになるのかなー。競技でおもしろそうなアイデアがあるんですが、相談しませんか?>みなさま。
中部集会 |
行ってまいりました、大同工業大学
やすさま、みなさま、お疲れ様でしたー、ということで行ってきました中部集会。大学まではすぐに行けましたが、そこからがなかなかわからず、
やすさんが入り口の前で待機してくださっているのを発見して集会場?入りしました。

工房?風なところで(となりの部屋には天井にクレーンもあり、数メートルのロボットならば作れそうだ)、しっかりとしたリングが既に運び込まれており、作業テーブルや電源タップまで用意してくださっていました。


ここですごいものを見せてもらいました。宇宙航行型レイヤードXです。う〜ん、すごい。宇宙戦艦かキャノン砲って感じです。 右は「ロボアクセル」をがんばるAgni。ARUMO-SiRは、2分オーバーでした。ミス連発。とほほ。なかなかこれ練習になります。 狭いところを回り込むように動かすので、落ちないように、しかもペットボトルにアタックできる位置に回りこまないといけないので、 思わず丁寧に操縦してしまいます。
新しく作りこんでいったアクションの手ごたえは良かったのですが、もともとある問題点はやはり解決できず…。うーん、どうしよう。 接着で作った肩パーツはまったく問題ありませんでした(補強はいってない方)。今後、接着によるフレーム製作を進めていこうと思います。 というわけで、次の4月15日の「ロボット・バトル in 大同工業大学」へ向けて、がんばろーと思います。
PRX-1510・音ってどれくらい? |
こんなもんです。
きゃのんさんから、プロクソンの大きいモーター音について質問がありましたので、
「こんなもん」という動画をアップします。スピンドルモータを全開でまわし、テーブルの上に携帯電話を置いて、これまた全開で鳴らしてみました。
撮影は、2m離れたところで行っています。
うるさいのかなー、うるさくないのかなー。う〜ん。

追記:明日は中部集会!
明日というか、既に結構いい時間なんですが、ぼちぼちっとツメの調整中。もうちょっとでいけそうなんだけどなー。う、久しぶりに1つサーボをやってしまった、うかつだった…。
5500円が〜(モニタ価格時)。これで壊したPRS-3401は通算3個。そろそろ修理出そうかなー。
ひょっとして、PRS-DE07Mになるとか。
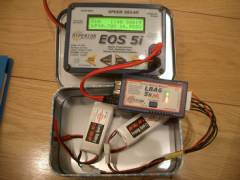
リポバランサを使ってみる・2セル2パック充放電 |
4セル充放電できるなら2セル2パック充放電も可能?
元ネタは、人形つかいさんから頂いたのですが…おもしろそうなので、うちでもやってみました。
今使っている充放電器は、SWALLOW advanceとHYPERION EOS 5iで(中身はほとんど同じ物です。
外見も印刷面と色以外は同じです…)、リポなら5セル充放電する能力があります。ということは、
2セル2パックを直列に接続してバランス取りながら充電すれば、便利じゃないかなーということで、
やってみました。真似される場合は、くれぐれもご注意を。
まずはコネクタですが、これは、バランサ側用の「HP-EOSLBA-MC-LBA」を1つとバッテリ側用の「HP-EOSLBA-MC-A*」を2つ購入しました。 で、このコネクタ、ケーブルが全部結線されていますので、使わないものを切ろうと思ったら…なんだかうまく外れそう… というわけで、細いドライバーできゅっとやったら外れました(オス側もメス側もはずれます)。後はハンダ付けして完了です。 それぞれの接続箇所は、熱収縮チューブで保護したのですが、今回は、それを束ねるのはやめておきました。 理由は、万が一、ハンダ付けしたところが尖っていて、それをさらに束ねる事で突き出したりしてショートすると怖いなーと。

というわけで、結線確認をしてさっそくスタンドアローン放電でテスト。LEDが4つ光って、 4セル認識しました。で、スタンドアローンで放電しました。2セルと比べて時間がかかっている気がします。 2セルの時は「やや悪」でも10分ぐらいでしたが、4セルですと20分ぐらいはかかっている気がします。


放電がうまくいったので、いよいよ充電テスト。充電器に接続している電源は12Vなのですが、 SWALLOW advanceや、このHYPERION EOS 5i等は、昇圧回路を内蔵しており、必要な電圧まで昇圧できるようになっています。 今まで、せいぜいリポ2セルの最高8.4Vぐらいでしたので、全然、気にしなかったんですが、 今回は4セル一気ということで、最高16.8Vぐらいまであがるはずです。そんなわけでやや緊張気味。
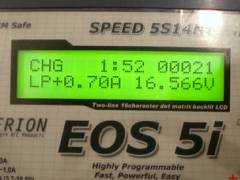
う〜む、すばらしい。ちゃんと電圧上がっています。というわけで、2セル2パック充放電実験完了です。 ものがものなので、結線図は載せませんが、もし、同じようなことをされる場合は、十分、注意してやってください。
HP nx6120/CT到着〜。 |
来た来た〜。(^_^)/





サイズは、A4のフルサイズ?ってやつですか。リブレットL1と比較すると左の写真のような感じです。 でも、結構、薄いので、触った感じは、それほど大きく感じません。液晶は、SXGA+です。わーい、ひろーい。 なんといってもこのノートPC、シリアルポート、パラレルポート、両方とも装備しています。これは便利! う〜ん、いい買い物したなー。これで134,400円はいい感じ。ぼちぼちっとセットアップしようと思います。 えっと、ディスクパーティションはどうなってるのかなー?コンピュータ名はどうしようかなー(コンピュータ名、 いつも悩みます…ちなみに今は…NEGI、NIRA、SERI…今度のは、"FUKI"とかどうかなー)。
今、ヒューレットパッカードのページを見たら、メモリの値段が下がって、さらに安くなってました…(T_T)
落下試験、すごい…
吉村さんとこの落下試験動画(2006.3.1)、すごいですねー。
ぼよよ〜んと動いているのがわかります。どんなふうに動かしているんだろう?…と考える時間はとても楽しいです。
そういえば、最近、動画アップしてないです。そろそろ何かアップしようかなー。