| ��T��ROBO-ONE�A���悢�斾���I�����͓����Ă邯�NjC���������Ă���]�I |
�݂Ȃ��܁A���������������ł��傤���H���悢�斾���ł��ˁI�C�}�C�`�A�S�ɗ]�T�������̂ŁA���ȒP�ɕ����Ă��������܂��B
G-Tune�̐i���ł����A�Q���قǑO����悤�₭����f�[�^�����J�n���܂����B�N���̏o���������Ă���Ȃ��B���́A����f�[�^������Ă̓\�t�g���f�o�b�O���āA�̌J��Ԃ��ł��B�r�̃T�[�{�O���v�Z���[�`���ȂA���̊��ɋy��ŁA�Q�������x�A�b�v�����Ă��܂��܂����i�Ȃ�����Ɏ��������̏ڍׂ́A������܂��j�BH8/3664�A�܂��܂�������Ă��܂��B�܂��A�����[�g����Ƃ��͑S�R�������Ă��܂���̂ŁA�u�y�j�����Ƃɂ�����������ł����v�A�u�y�j���̖遁�����A�\�I�ʉ߂����烊���[�g�f�o�b�O���i���p����X�N���v�g�쐬�v�A�u���j�����\�I���ʂ��Ă�������тŎQ��A�����łȂ�������ϐ�v�ƂȂ肻���ł��B����킯�ŁA�^�z�e���ߕӂł́A��Ӓ��A���W�R���g���o�Ă��邩�॥��B���A���M�@�̓d�r�A�\�������ĂȂ���B����Ȃ��Ƃ����Ȃ��ł��B���������B
����̕��A���O�R���p�͍���ł��܂����i��ӂłł��܂����B�C�F�B�I�܂��܂���]�͂���]�`�j�B�����͂R�����Ə������ł����A�b�ԂQ���I�ł��B�v������肳�����Ƃł��Ă悩�����B�OG-Tune�Ɣ�ׂ�ƁA���s���x�S�{�I�ł��B�����Ǝ��Ԃ�����A�{���炢�����邩�����Ċ����ł����A���̂ւ�ɂ��Ă����܂��B�����悤�ȗ\�Z�ł悭��������ȁA�Ǝv���A�܂��A�\�I�f���p�̃f�[�^���ł��Ă��܂���B���݁A�쐬���ł��B�Ђ���Ƃ���������肵�Ă��A�����Ȃ���f�[�^����Ă��邩������܂���̂ŁA�����z�������炲�߂�Ȃ����B�ł��A�����ȕ��Ƃ��b�������ł��B���Ԃ��ł��܂�����A���ЁA���{�b�g�k�`�ɉԂ��������܂��傤�I
�ړ��\��ł����A���A�V�����œ����ړ����ĉ����肵�܂��āA���̓��͂�����āA������ɂ��旂�����s���܂��B�ł́A�݂Ȃ���A���ł�����܂��傤�I
| �Ȃ悭�킩���SIPHA CORE�ċN������ |
SIPHA CORE�g���u��
���`�A�悭�킩��Ȃ������ɁASIPHA
CORE�A�����悤�ɂȂ��Ă��܂��܂����B����`�B�����āu�悭�킩��Ȃ����Ǔ����悤�ɂȂ����v���u�������Ȃ��Ȃ�悤�ɂȂ邩�킩��Ȃ��v�ł����́B�n�[�h�͂������Ȃ��Ă��邾���Ȃ̂ŁA���������͂܂���͏��߂Ăł��B�܂��A���傤���Ȃ��̂ŁA���̂܂܍s�����B�����A�ォ��͔��c���Ă�����Ȃ��̂ŁA�u�Ԓ�d�p�o�b�N�A�b�v��H�͂�����߂ċF�낤�B�����̃X�L���ł́A����ȏ�A���Ԃ��g���Ă����傤���Ȃ������B�ǂȂ��l������]�����ꂽ�Ƃ������Ƃł悵�Ƃ��悤�B�Ȃ̗덆�@�݂����ł��B�����@�̎��ɂ͂����ƈ��肵�����̂𥥥�B
R/C��M�@��荞�݂ƃT�[�{����M���o��
���������ˁ`�A�\�t�g���P���ʁB�O��TimverW��TimerV�������ɋ������āA�����ׂ��ƌ��\�u���u�����Ă����̂��A�������Ɣ[�܂�܂����B�����A�����x�Z���T�p���X�J�E���g���AR/C��M�@��荞�݂������胊�A���^�C���ł��B�ڂ����b�͗��������Ă���ɂ��܂��ˁ`�B�ȒP�Ɍ����ƁATimerV�Ŋ�{�I�ɃJ�E���g����M���̎�荞�݂�����Ă���̂ł����A����TimerV���荞�ݏ������AON/OFF����悤�ɂ��܂����B
���`�āA�܂��͋��L�A���L�B
| �����A�ȂT�C�e�[�ASIPHA CORE�g���Ԃ� |
SIPHA
CORE�A�g���Ԃ�`
����`�A����Ƃ����P�W�̃T�[�{���䂪�ł���悤�ɂȂ��Ă������삾�I�i���Ȃ݂Ƀ��J�������X�O���ň�ʂ蓮���悤�ɂȂ�܂����j�Ǝv������A�}��SIPHA
CORE�̕���������������B�N�����Ă�LED���`�J�`�J�A�N�����b�Z�[�W���\������Ȃ����A���Z�b�g���Ă��ςȊ����B�u�S���v�ƃn�f�ɓ]�����ゾ�������߁A�{�[�h���^���Ē���������ł����ǁA�܂������킩�炸�B�������ɂ��낢��g�`���āA�d���o�b�N�A�b�v��H�̃R���f���T����A���ӂ��Ă��܂��܂����B����Ȃ킯�Ō��ǁA�R���f���T���͂����Ă��܂��܂����B���`�A���i���������A�ǂ����悤�E�E�E�B
��ł܂��A�C����蒼���Ē����𑱂���ƁE�E�E�����A
�V���A���P�[�u�����f�����Ă�ł͂Ȃ����`�I
�i�ŋ߂��C�ɓ���̕����}�l�Ă݂܂����j
�]�Ƃ��ɐꂽ�͗l�B�����A���ꂪ������������A���܂ł̋�J�͂Ȃ����낤�H�H�H�Ƃ����킯�ŁA���݁A���������Ȃ̂œ���f�[�^�̃f�o�b�O�����₷���悤�ɁA���߂̂R���P�[�u���ō�蒼�����B������Ȃō����͂Ȃ�ꂽ�̂ŁA�e�X�g�͖����ɂ�����ƁB���������A����Ȃ��Ƃ�����`�B���C�ɒʐM�����Ă������AROM�������݂��ł��Ă���ŁA�S�R�C�����܂���ł����B�܁A�o���l���オ�����Ƃ����ƂŁB
�g���u�����T�[�{�J���Ă݂܂����B
����ς�r�O�R�s�̃M�A������܂����B����ɂ܂����͒l�~�X�ŃM�A������܂����B���P�[�X�Ƃ��T�[�{�z�[�����t�������猩�āA�R�߂̃M�A�ł��B���[�^���猩�āA�ŏ��ɔ����M�A�A���̎��ɂ����̏��̂悤�Ȋi�D�������M�A������̂ł����A���̃M�A�̏��������̎��������ɔ��ł��܂����B���`��A�����B
| H8/3664�̃^�C�}�`�̃��Z�b�g�Ƀn�}�� |
�{���̐i��
�r�O�R�s�̃M�A���P�Ă��܂��܂����B�ǂ̃M�A����ꂽ���͂��ꂩ�炵��ׂ܂��B���`�ށB�悭�悭���ׂĂ݂���A�Q�{�A�T�[�{����M���������ƂłĂ��Ȃ��Ƃ��낪����͗l�B�������Z���p���X���łĂ��āA����ŐU�肫��ŃM�A�������ꂽ�悤�ł��B�����A���荞�ݕ����̃o�O���Ȃ��B�v���O������́A�ςȐ���l�������Ȃ��悤�ȃR�[�h������Ă����ł����A����ɓ����Ă��Ȃ���A������Ӗ������B�M�A�������Ƃ������ǁA��ŊJ���Ă݂悤�Ǝv���܂��B���̃T�[�{�͂��ׂĐ���ł��邱�Ɗm�F�I���B�r�O�R�s������f�o�b�O���āA���ꂩ��R/C��M�@�M����荞�݂Ɖ����x�Z���T��荞�݃v���O�����삳���Ẵt���o�[�W�����e�X�g�ɓ��낤�Ǝv���܂��B����́A�T�[�{����M��18ch���ƂƂ��ɁA�u�T�[�{����M���v���v�������v���O�����X�e�b�v�P�v�i�ȂႻ���H�j�������Ă���̂ŁA���ʂ��y���݂ł��B
LED�_�����䑱��
�ȑO�A�u�k�d�c�������Ȃ��`�v�Ƒ����ł���܂������A�����A�����܂����B�@����ɁA�ȑO�̓u���b�h�{�[�h�Ŏ����Ă�����ł����A���ꂪ�A�g�����W�X�^�E�x�[�X���̓d���~�����N�����Ă���A���̕������ꍞ���LED�����ꂢ�ɏ����Ȃ������̂ł́H�ƍl���Ă��܂��BB.W����A����������A�t�H���[�ǂ������肪�Ƃ��������܂����BSISO�́u�I�g�R�̘Q���v���s���ׂ��A������Ă���܂��B
���Ă��Ė{���H8/3664�^�C�}�`���Z�b�g
�����̓^�C�}�`�ɂ͂܂�܂����B�T�[�{����̕��͌�ł͂܂낤�Ǝv���܂��i�j�B�^�C�}�Ŏ��Ԃ𑪂���LED���`�J�`�J�Ƃ����P���ȃv���O������lj����Ă�����ł����ǁALED���`�J�`�J����̂ł��B�f�o�b�O�p�ɃV���A���ʐM�\��������ƃ`�J�`�J����B���`��B�f�o�b�O�������ł��ƁA�ǂ��������Ƒ҂��Ă��Ȃ��悤�ł��B�v���O�����͂���Ȋ����ł��B
// ������
TA.TMA.BYTE = 0x1A; // ���v�^�C���x�[�X�iOVF��0.25sec�j�ŃJ�E���g�A�b�v
// �^�C�}�҂����i0.25sec x nCount025�����҂��܂��j
void SFM_Wait025( int nCount025 )
{
int nCnt;
for( nCnt = 0; nCnt < nCount025; nCnt++ ){
TA.TCA = 0;
while( TA.TCA != 0xff );
}
}
�\���̃f�o�b�O������ꂽ�瓮���悤�ɂȂ�܂����̂ŁA�s�s���Ƃ��܂����B�u�^�C�}���N���A�ł��Ă��Ȃ��I�v�̂ł́H���Ńs�s���Ɨ������Ƃ����ƁA�^�C�}�҂������烊�^�[�����āA�����Ăяo���ƃ^�C�}�������Ȃ����ǁA������Ƒ҂��Ă���i�f�o�b�O�����o�͂��Ă���j�Ăяo���Ƃ����Ƒ҂��܂��i���ۂɂ͂�����ƈႤ���ԂƂ����̂���ł킩��܂����j�B�܂�A�����ɌĂяo�����Ƃ��́A�����Ƀ��^�[�����������������Ă���Ƃ������ƂŁA���Ȃ킿�^�C�}�l���O�ɂȂ��Ă��Ȃ��A�Ƃ������Ƃ���ł��B
��ŁA�ǂ݂܂����ł���A�}�j���A���B��ŁA�킩�����u�Ռ��̎����I�vTA.TCA�͏������݂��ł��Ȃ��I
�Ƃ����킯�ŁATA.TCA = 0�͊ԈႢ�B�}�j���A�����悭�ǂ�ATA.TCA�̓��[�h�͂ł���Ƃ͏����Ă���܂����ǁA���C�g�ł���Ƃ͏����Ă���܂���i���Ȃ݂ɑ��̃^�C�}�̃J�E���^�́u���[�h�^���C�g�ł��܂��v�Ɩ��L����Ă��܂��j�B��ł܂��A�悭�ǂނƂł��˥���uTMA2��1�ɂ���ƁATCA����уv���X�P�[��W�͂Ƃ���H'00�N���A����܂��B�v�Ȃ�ł��B�����A�m������ł��B����ŃJ�E���^�̖������A���̃^�C�}�ƈႤ�̂ˁB�Ƃ����킯�ŁuTA.TCA = 0�v�́A�uTA.TMA.BYTE = 0x1E; TA.TMA.BYTE = 0x1A;�v�Ƃ���̂������ł��B����łȂ����Ƒ҂悤�ɂ͂Ȃ����̂ł����A�Ȃ������삪�\�肵�����Ԃǂ��肶��Ȃ����Ƃ����o�B�悭�킩��Ȃ��̂ŁA������OVF�Ō���悤�ɂ��āA���̂悤�ȃ\�[�X�R�[�h�ɂ�����v�����Ƃ���ɓ����܂����B
void SFM_Wait025( int nCount025 )
{
int nCnt;
for( nCnt = 0; nCnt < nCount025; nCnt++ ){
IRR1.BIT.IRRTA = 0;
TA.TMA.BYTE = 0x1E; TA.TMA.BYTE = 0x1A;
while( IRR1.BIT.IRRTA == 0 );
}
}
����`�A�͂܂����͂܂����B
| �T�[�{���� |
�{���̏�
�ǂ��ł��B�v���Ԃ�̍X�V�ł��B������ƑO�ɏo�����疳���߂�܂��āA�d�����Ȃ���̃o�^�o�^�����������Ă��āA�悤�₭���{�b�g�̕��Ɏ��Ԃ�����悤�ɂȂ��Ă��܂����B�悭�݂�ƥ���o���ɍs���O�܂ł́A���N�͖����X�V���Ă�����ł��ˁ`�B���A�f�W�J�����g���Ȃ������肷��̂ŁA���T�͎ʐ^��������������܂���낵���ł��B
���Ă��āA����Ȃ킯�ŁA���͐����ƃ}�C�R������̓��ʃ`�F�b�N�����܂��܂��āA�e�X�g�v���O��������{�`�����v���O�����ɐ�ւ��ăe�X�g���J�n�����Ƃ���ł��B
�T�[�{���ꂼ��̌�
�ȑO�ɂ����傢�Ə����܂������A�T�[�{���Č�������܂��B���̃��[�J�̃T�[�{�͒m��Ȃ���ł����AGWS�̃T�[�{���g���Ă������̌o���l�ł́A�����^�̃T�[�{�ł��A����p���X����ꂽ�Ƃ��̓���͈͂��قȂ�����A����p���X���ɑ��ē��삷��p�x���قȂ����肵�܂��B�s�v�c�Ɠ���͈͂͂����������������ł����ǁB����Ȃ킯�ŁA��������[�`��������āA�ꔭ���܂��Ă��܂��B�V�����T�[�{���g�p���鎞�́A��x�`�F�b�N���āA�V���A��EEPROM�ɏ������ނ悤�ɂ��Ă��܂��B
��̓I�ɂǂꂭ�炢�Ⴄ�����Ă����ƁE�E�ESIPHA CORE�ł́A5000�J�E���g��2.5msec�̃p���X���ł�悤�Ƀv���O����������Ă��܂����A���̐�����ɂ����āA�ȉ��̂悤�Ȋ����ɂȂ�܂��B
| �T�[�{ | 90�x����̂��߂̃p���X�� |
| S03T | 1670 (0.000835msec) |
| S03T | 1700 (0.000850msec) |
| MICRO MG | 1520 (0.000760msec) |
����ȊO�ɁA��ʒu�̃I�t�Z�b�g���������Ă��܂��i��������\�A�T�[�{�ɂ���ĈႢ�܂��j�B
�����������A�ʂ̓������z�����鏈�������Ă����ƁA���L����s���̓�������Ƃ��̒Z���ԉ��ɁA���ɖ��ɗ��̂ł����߂ł��B������A�Б����������A��̓R�s�[��������킯�ł��āB�E�p���`�ƍ��p���`�́A�f�[�^�����E�Ђ�����Ԃ������œ����悤�ɓ��삵�Ă���܂��B�܂��A�T�[�{��������A�p���X���w��ŏ�L�f�[�^���v�����čĐݒ肵�Ă��A���̂܂܃f�[�^���g���܂��̂ŁA���ɕ֗��ł��B
���Ƃͥ���T�[�{�̓������p���X���ɑ��ă��j�A����Ȃ��C������̂ł����A���߂Čv���������Ƃ͂Ȃ��ł��B���Ƃ��ƁA�������g���Ă���T�[�{�Ȃ�āA������ƕ��ׂ�������A�����Ɉʒu���ς���Ă��܂��̂ŁA�܁`�A�����܂ŋ��߂�͎̂��̃X�e�b�v���Ȃ��Ǝv���Ă��܂��B�r�Ō����A�����ŗ������Ƃ��A�T�[�{���������Ă������ɂ܂������ɗ��Ă��Ԃɂ����Ă�����A���̂Ƃ���͎��p����Ȃ����Ȃ����Ďv���Ă܂��B
| ������Ƃ��������������̂`�a�r���i |
�o�b�e�����ڗp�̃v���[�g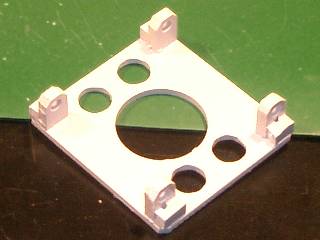

�ǂ��A����ɂ��́B����A�r�ɓd�����ڂ��悤�Ǝv���Ă���̂ł����A�G�Ȃ��炿�傢�Ƃ��������������ŕ��i�����܂����̂Ŏʐ^�ڂ����Ⴂ�܂��B����ɂ��Ă�������ABS���i�͍��̂���ςł��B��o���̂���ςł����A���`����̂���ςł��B������ς��ă��X�������ł��B�w�ʼn������Ă��Ǝw�����Ă��܂����A���͂ɌŒ肷��ƁA�C�}�C�`�ڕW�̐��������Ȃ��č�肷���邵�B����̉ۑ�ł��ˁ`�B�Ȃ������@�Ȃ����ȁH
��]�I�`�a�r��3mm�p�ނƂ�3x5mm�p�ނƂ��A����Ȍ`�̂��́I�ł���X�O�x�̓ӎO�p�`�f�ʂ̂�Ƃ��B�ǂ����ɔ����ĂȂ��ł��傤���H���ꂳ������A����Œ��p�������Ȃ��čςނ̂ŁA�����Ԑ��x�Ƃ��オ���āA�ڒ��܂̓K�p�͈͂��L�������ł����ǁB��҂����Ă���܂��B
�`�a�r����������ڒ�����R�c
�����������i�����Ƃ��́A�Z���_�C���́u�`�a�r�ڒ��܁v���g���Đڒ����Ă��܂��B����ɂ���Ƀr�X�~�߂p���Ă��܂��i���G�Ƃ��ẮA�ڒ��܂����ł����������Ȃ�ł����A�ꉞ�AROBO-ONE�ŏՌ��������ł��̂Łj�B���͋ߏ��̖͌^������œ��肵�܂����B���肢����ƁA�e����Ƃ���i�����H�[�j�ł�ABS�Ƃ��ƈꏏ�ɔ�����݂����ł��B�͌^������̂�����u����A�Ȃ��Ȃ������ł��傤�`�v�ƌ����Ă����̂ŁA�u���Ă�X�͏��Ȃ��̂�������܂���B
�ڒ��̃R�c�ł����A�ڒ��܂�h�����畔�i�̐ڒ��ʂ����킹�Ă��肮����܂��B�������邾������Ȃ��āA���肮����܂��B��������ƁA�ڒ��܂ɂ���Đڒ��ʂ��n���Ă��ĂȂ����x���ǂ�ǂ�オ���Ă��܂��B�w�ɂ́A�ڒ��ʂ̊ԂɔS�y�����܂��Ă���悤�Ȋ��G���`����Ă���Ǝv���܂��B��ŁA�����t���Ċ����ł��B���ƁA���p�ڒ��ł����A����H�ł��Ƃǂ����Ă����p���ł���łȂ������肷���ł����A������u���p�ɂȁ`��A���p�ɂȁ`��v�ƔO���Ȃ��炮�肮����ƁA����s�v�c�A�������炢�̃Y���Ȃ�Β��p�ɂȂ�܂��B�������A��肷����Ɛ��@�̕��ɉe�����ł܂��̂ŁA�قǂقǂɁB
��r�������Ƃ͖�����ł����A�`�a�r���āA�Ȃ�ƂȂ��\�ʂɃ��b�N�X���������Ă���悤�Ȋ���������̂ŁA�A���R�[���Ƃ��ŒE�����Ă��Ƃ����Ƃ����̂��ȁH
G-Tune2004F�̍�Ə�
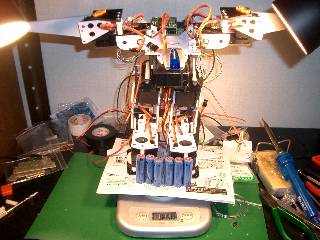
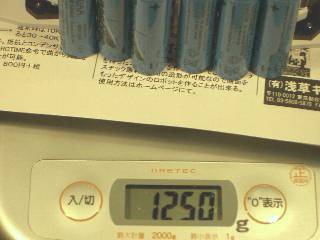
��������A�܂��o�������B����Ȃ킯�ŁA�o���O�̏d����ł��B���ƁA�d���n�̔z���ƁA�}�C�R�����Œ肷��X�e�[�Ƃ��A�ׂ������̂����Ȃ��Ƃ����Ȃ���ł����A�d�r�Ƃ��A�܂����Ă��Ȃ���G�c�ȕ��i���Ƃ肠�����S���ڂ��āE�E�E�C�ɂȂ�̏d�́����Ⴖ��`��i�����Łj�A�u�P�Q�T�O���i�P���P�R�����݁j�v�ł��B���Ԃ�A�]�T���āi�傫�Ȑ��Łj�A�ŏI�͂P�R�O�O�����炢�ɂȂ�Ǝv���܂��B�P�W�T�[�{�Ȃ�ŁA�܂�����Ȃ���ł��傤�B�v���͗����p�̃n�J���̂��ߐ��x�̓n�e�i�ł����ǁA���������������ł��傤�B�������g�p���邽�߁A����Ȃ��悤�Ƀn�J���Ɏ������Ԃ��Ă���Ă܂��B
������ƌ��炵����AJ-class���o�ꂻ���i�����I�ɖ����ł����ǁj�B���قفB�Ȃ�ƂȂ������ۂ����Ǒ��v���Ȃ��B�܂��A����́A�i���_�����̓p�t�H�[�}���X�_���i������낤�����ǁj�Ȃ�ŁA������ƃ����Ȋ����͔ے�ł��Ȃ��ł��B���Ă��āA����������Ń��J�S�������ł��B��������܂��o���Ȃ̂ŁA���ꂩ��������������܂��B��́A�����ƕ����邩�H�ł��ˁI
�͂��Ǝv������ł����A�d�C�����ĂȂ��Ă��q�U�Ȃ��ė����܂��ˁA���̃��{����B
| �T�[�{�W����� |
�T�[�{�W�����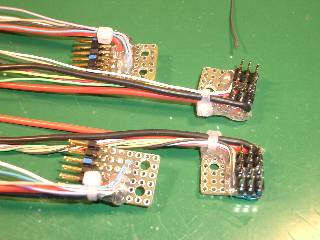
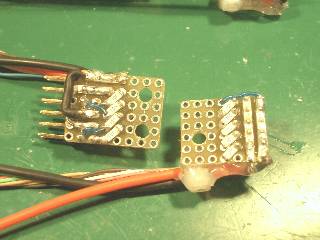
�����́A�T�[�{�W������܂����B����́A�S�T�[�{�A�T�T�[�{�W�߂����Q���Âł��B�S�T�[�{�W�߂��͘r�ɁA�T�T�[�{�W�߂��͋r�ɂ���\��ł��B�ʐ^�����r�ɂ����ŁA�k�^�̃s���w�b�_�����Ă���܂��B�e�P�[�u���̍������̓z�b�g�{���h�Ōł߂Ă���܂��B�z�b�g�{���h�A���\���C�ɓ���ł��āA�Ȃ��Ȃ��g���Ղ��ł��B�悭�������āA����������炩���āA�ڒ��A�Œ���A�z�b�g�{���h����߂��n�j�Ȃ�ŁA�����Ɏ��̍�Ƃ��ł��邵�ł����߂ł��B
����́A�ی�ړI�A���̑��ɂ��A�ꉞ�A�M������100���̒�R�����Ă��܂��B�H���d�q�Ŕ������`�b�v��R�ł��B�E�̎ʐ^�̂悤�ɁA�߂ɓ\��t����悤�ɂ͂t������ƌ��\���ꂢ�ɔ[�܂�܂��B�͂t�����A�ӊO�ɊȒP�ł����B
�����̐i��
�܂�����Ă����ł����ǁA����ƃo�b�N�p�b�N�Ƃ����ł��܂��āA���ꂩ����������������A�Ȃ��J�A��ʂ�ł��邩�Ȃ����Ċ����ł��B�Ȃ��Ȃ��A�ǂ��ɃP�[�u���ʂ������āA����ł���ˁB������n�f�ɊO��ʂ��܂��B�{���͒��ɓ��ꂽ����ł����ǁA���������A�v�̌o�����܂Ȃ��Ƃ��߂��ȁB
| �����͏�����Ői�݃C�}�C�` |
�{���́A�Ȃ����ׂ������Ă��܂��A���������Ȃ���ŁA�i�݂��C�}�C�`�Ȃ�ł����A�݂Ȃ�����A���ׂɂ͋C�����Ă��������B �Ƃ������Ȃ���A���Ԃ������Ă̓T�[�{�̏W����Ȃ�č���Ă݂Ă��ł����A������ƖO���Ă����̂ŁA�T�[�{��H8/3664�ɂ������ē���͈̓`�F�b�N�Ƃ����Ă݂Ă܂��B���\�A�T�[�{�ɂ���ĉ��p���X�o���Ƃǂꂾ���������Ⴄ�i�������[�J�[�̓����^�̂��̂ł��j�̂ŁA�����`�F�b�N���ĕ�l�Ƃ�������Ă���g���Ă��܂��B
�ȂA�悭���Ă�ƁAGWS PARK�̎����傫���A�܂��o���������߂Ńv���v�������ł��B7.2V�ŃT�[�{�����Ă���̂��e�����Ă���̂�������܂��AG-Tune2003A�Ɏ����Ȃ������Ƃ��Ƃ͂����ԈႤ�����ł��B����͂Ȃ�Ƃ�����Ƃ�����ł��B���`�ށB����܂����B�����l���邱�Ƃɂ��܂��B
| SIPHA CORE�Ƀ��Z�b�g�X�C�b�`���Ă݂܂����B |
���Z�b�g�X�C�b�`�̒lj�
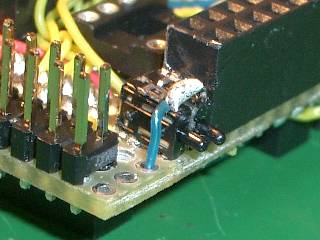
����̘b�̒��ł�������Ə����܂������A���ǁA���Z�b�g�X�C�b�`�ƃR���f���T�̕��d�X�C�b�`��lj����܂����B�R���f���T�̕��d�̕��́A�X�C�b�`�ƒ�R���܂��ăO�����h�ɗ��Ƃ��Ⴂ����I���炢�ł悳���������̂Ŗ��Ȃ�������ł����A�u���Z�b�g�X�C�b�`�v���Ăǂ�����ĂȂ��낤�H�H�H�ƍl������ł��܂��܂����i�Ȃ�đf�l�ȃ��^�V�j�B
AKI-H8/3664�̉�H�}�Ƃɂ�߂������āA�u�����ƁA�O�����h�ɗ��Ƃ��X�C�b�`����������v�Ƃ������_�ɒB���܂��āA����Ă݂��炻�̂Ƃ���ł����B�悩�����悩�����B
�������v�b�V���X�C�b�`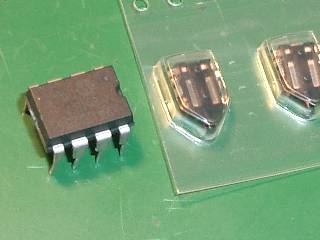
�Ƃ͂����A�����A���C���{�[�h�̕��ɂ̓X�y�[�X�������̂Łu����Ȏ��p�v�̃p�[�c�̓o��ł��B�����̎ʐ^�Ɏʂ��Ă���̂������ł��B�\�ʎ����p�������ł��B�T�C�Y��r�̂��߁AIC��u���Ă݂܂����B�ȑO�A�����Ƒ傫�����Ǝv�������i.com�Ŕ��������̂ł��B�����A���낢�남�����낢���̂����������Ă���̂ŁA���X�̂����Ă��܂��B���̃p�[�c�����\���������̂Ŕ������L�����B�i���̃v�b�V���{�^������������A����ɂ����Ⴆ�`�Ǝv���Ĕ����Ă݂���A�����������������B��͂́j
�Q�A���Ŏ������Ă��܂����A�Е������Z�b�g�A������������d�p�ł��B���������Ă������ɉ����ɂ����̂ŁA�O�������Z�b�g�X�C�b�`�ɂ��܂����B����`�A��������̂ɋ�J���܂����B����܂��ς�������ŁA�ڒ��܂Ɨ��ʃe�[�v�ŃX�C�b�`����ɌŒ肵�Ă�����܂����B
���`�āA���ꂩ��T�[�{�W�����낤���ƁI
| SIPHA CORE�̃f�o�b�O |
���Ă��āA�܂��̓e�X�g�v���O�����œ���`�F�b�N �����Ȃ薢�f�o�b�O�̂ق�܂���\�t�g�𑖂点��ƁA�킯�킩��Ȃ��Ȃ�̂ŁA�܂���SIPHA
CORE�p�̃e�X�g�v���O����������āA�v�����悤�ɓ��삵�Ă��邩�`�F�b�N���Ă݂܂����B�e�|�[�g�̓��o�͐ݒ���s���āA���Ԃɏo�͂�������͏�Ԃ�\�������肷��v���O�����ł��B�Ƃ肠�����A�S�M���A�����Ɠ��o�͂ł��Ă��܂����B�悵�悵�B��ŁAR/C��M�@�M����荞�݂̃`�F�b�N�������祥�����H�m�C�Y�݂����̂���������Ă��܂��B�ς��Ȃ��Ǝv���Ă悭������A�N���X�^����t���Y��Ă��܂����B�Ƃ����킯�ł����̂����̎ʐ^�ł��BKnowledge�Ő������Ă���̂Ɠ������@�ł������āA����𗼖ʃe�[�v�Ŏ�M�@���j�b�g�ɓ\��t���Ă���܂��BGWS�̌y�ʎ�M�@�ɁA�t�^�o�̒n��g�p�N���X�^�������Ă��܂��B��p�Ȃ�A����GWS�̃P�[�X�Ɏ��܂鏬�^�N���X�^����GWS����̔�����Ă���̂ŁA�n��p���̔����Ă����Ƃ��ꂵ���ł��ˁ`�i��M�@���́A�����ł����j�B
�����Ȃ薢�f�o�b�O�̂ق�܂���\�t�g�𑖂点��ƁA�킯�킩��Ȃ��Ȃ�̂ŁA�܂���SIPHA
CORE�p�̃e�X�g�v���O����������āA�v�����悤�ɓ��삵�Ă��邩�`�F�b�N���Ă݂܂����B�e�|�[�g�̓��o�͐ݒ���s���āA���Ԃɏo�͂�������͏�Ԃ�\�������肷��v���O�����ł��B�Ƃ肠�����A�S�M���A�����Ɠ��o�͂ł��Ă��܂����B�悵�悵�B��ŁAR/C��M�@�M����荞�݂̃`�F�b�N�������祥�����H�m�C�Y�݂����̂���������Ă��܂��B�ς��Ȃ��Ǝv���Ă悭������A�N���X�^����t���Y��Ă��܂����B�Ƃ����킯�ł����̂����̎ʐ^�ł��BKnowledge�Ő������Ă���̂Ɠ������@�ł������āA����𗼖ʃe�[�v�Ŏ�M�@���j�b�g�ɓ\��t���Ă���܂��BGWS�̌y�ʎ�M�@�ɁA�t�^�o�̒n��g�p�N���X�^�������Ă��܂��B��p�Ȃ�A����GWS�̃P�[�X�Ɏ��܂鏬�^�N���X�^����GWS����̔�����Ă���̂ŁA�n��p���̔����Ă����Ƃ��ꂵ���ł��ˁ`�i��M�@���́A�����ł����j�B
�������x�Z���T�@�ꔭ����ł��B�p���X���o�Ă��āA�Q�����ꂼ��̕����ɌX����Ɛ��l���ω����Ă����܂��B���ɕs�v�c�Ɋ����镔�i�ł��B�}�j���A����ǂނƓ��쌴���������Ă���܂����A����ɂ��Ă��s�v�c�ł��B���c��݂܂��ˁ`�B
��LED������ԁ@�s�v�c���Ȃ�����Ǝv�����Ƃ��Bwhile(1)
IO.PDR5.BIT.B5=IO.PDR1.BIT.B0;���Ă��Ă���ł����ǁi�O�Ƀu���b�h�{�[�h�Ńe�X�g�����Ƃ������̃v���O�����ł��j�A��������ƃv�b�V���{�^���̏�Ԃ����̂܂o�͂��邱�ƂɂȂ��ł����A����𑖂点��ƁA������Ԃł��u�ځ[�v���ƌ����ł��B��ŁA��������Ȃ��āA�����ꂽ�Ƃ������i���͕ω������Ƃ������j�o�̓|�[�g�ɕω���^����ƁA�����Ə������܂��B�v�b�V���X�C�b�`�̓��͐M���������Ă���Ƃ������Ƃ͖����悤�ł��B�悭�킩��Ȃ��ł����A���̂܂܍s�����Ǝv���܂��B
���d���o�b�N�A�b�v�@�o�b�N�A�b�v�́u1.5�b�̗\��v�ł������A����Ă݂���A�̊���0.3�`0.5�b���炢�ł����B���`��A�ǂ����ɖ�肪����̂��ȁB����Ƃ��v�Z�ɊԈႢ������̂��ȁH��������낵���Ȃ����ƂɁA�d�����~�����Ăb�o�t�������~������ɓd�������A���Ă��A����Ƃ�����Ƃ����킸�B���ǁA��������d�����������Ă������Ȃ����Ȃ��ƍċN�����Ȃ������ł��B���Z�b�gIC�����Ă���킯�ł͂Ȃ��̂ŁA���ɒ��r���[�ȏ�ԂɂȂ��Ă���\����ł��B�����A����́u�ċN�����Ȃ��v�Ƃ������ۂ��A�u�V���A���ʐM���ĊJ���Ȃ��v�Ƃ�����ԂŃ`�F�b�N���Ă��邾���ł��̂ŁA�����������ׂĂ݂鎖�ɂ��܂��B�܂��A���Z�b�g�r�v�͂��邱�Ƃɂ��悤�Ǝv���܂��B
�����̑��C�ɂȂ�Ƃ���@���߂ă`�F�b�N�����̂͏��߂Ăł����A�o�W�T�A������Ɠd���Ⴂ�ł��ˁB����AAKI-H8/3664�̃{�[�h��Ńv���_�E������Ă���s���Ȃ�ł����A���̊W�Ȃ�ł��傤���B
���āA���̓T�[�{�̏W���{�[�h����낤�Ǝv���܂��B
| SIPHA CORE�����������X�B |
�����͊��������B�݂Ȃ��܁A���������������ł��傤���H�{���A�V���b�N�Ȃ��Ƃ�����B���A��Ђɍs�����Ǝv���ĎԂ𑖂点�Ă�����A�ڂ̑O��������ʕ��̂��͂˂Ă��܂����B���x��50km/h�B�u�S�c���v�Ƃ������ƂƂ��ɁA�Ԃ̃t�����g�K���X�ɐ��Z���`���x�̃q�r�������Ă��܂��܂����B���������̂͏C�������������ł����A������Ƒ傫�����Ȃ�����B�܁`�A�Ԃ��^�]���n�߂āA���Q�O�N�߂��A��x���炢�͂���Ȃ��Ƃ�����ł��傤�Ƃ������ƂŁB����������������A����ȏ�̕|���ڂɂ������ĂȂ����ŁA�Ƃ肠�����ǂ������Ƃ������Ƃɂ��Ă��������ƁB
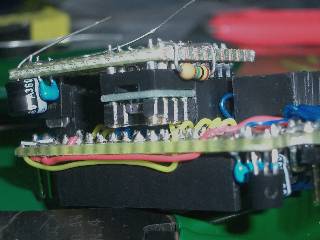
���ꂪSIPHA CORE�ł��B�ӂ��B
���āA�C����蒼���ĥ������Ƃ���SIPHA
CORE�̌������������܂����B
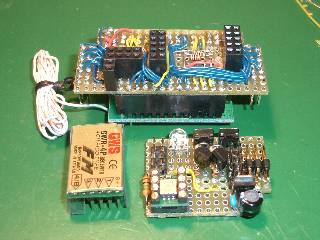
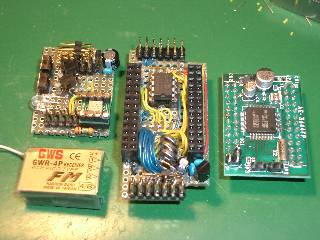
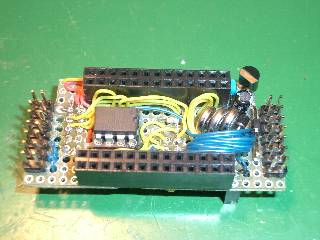
���ꂪ�S�̂ł��B���̉�̒��ɁA���낢������Ă܂��B���ɒP�R�d�r��u���Ďʐ^�Ƃ��Č��܂������A�傫���A�킩���Ă��������܂��ł��傤���H���A�v�������傫������BR/C��M�@�Ƃ��X�C�b�`�Ƃ��́A�ʂ̏ꏊ�ɐςނ悤�ɂ��āA��ꖇ���炵�������悩�������Ȃ��Ƃ��v���Ă��肵�܂��B�T�[�{18ch����p�ɂȂ��Ă��܂����A�܂��\�t�g�͂ł��ĂȂ������肵�܂��B���C�Ƀ��h�͂��Ă���C������̂ŁA�Ȃ�Ƃ��Ȃ�ł��傤�B

- �\���@�}�C�R���{�[�h�𒆐S�ɁA�}�C�R���A��M�@�A�X�C�b�`�^�Z���T�{�[�h��ڑ�����悤�ɂȂ��Ă��܂��B�܂��A�T�[�{����M���o�͂́A�M�����{�O�����h�݂̂Ƃ��Ă��܂��iG-Tune 2003A�Ŏ������Ė��͖��������̂Łj�B
- �d���j�n���@�d���́A�}�C�R���A��M�@�p�ƁA�Z���T�[�A�k�d�c�쓮�p�ɂQ�n�������Ă��܂��B�����Z���T�[�iGP2D12�j�����\�d����H���Ƃ̘b������܂����̂ŁA��q�̓d���o�b�N�A�b�v�̌�������A���̂悤�ɕ����Ă��܂��B�P������ő�100mA���炢�����Ă������������������ł��B�m���ɁA�}�j���A�����悭�ǂނƁu���Ϗ���d���F�ő�50mA�v�Ə����Ă���A�悭�킩���ł��B���ς̍ő���āH�H�H
�X�C�b�`�A�Z���T�ALED�쓮��H�ƁA�����p�̓d�����������Ă��܂��B �Ȃd�������\���肷����������ł����̂ŁA�X�y�[�X�����������Ȃ������ɂȂ��Ă��܂��܂����B�Ƃ������Ƃ́ALED�쓮��H�������P�ڂ��ꂻ���ł�����B����������Ⴈ�����Ȃ��B
- �����Z���T�p�[�q�~�Q�@�d���ƃA�i���O���͂��Q�Z�b�g���Ă��邾���ł��B�R�l�N�^�����S�Ɋ���ɉB���悤�A���\�A���܂����Ƃ���ɂ��܂����B����A�����ł��邩�ǂ����͂킩��Ȃ��̂ł����A���������R�l�N�^�͂��Ă����܂����B
- �����{�^���~�Q�@�f���Ȃǂ̃X�^�[�g�X�C�b�`�ł��BH8/3664�́A�ꕔ�A�����Ńv���A�b�v�ł���|�[�g������A���̃|�[�g�ɃX�C�b�`��ڑ����Ă��邽�߁A�v���A�b�v��R�͎������Ă��܂���B�ʐ^�̂悤�ɗ��ĂĂ��Ă݂܂����B���傤�ǂ����ł��B
- ����\���Q�F�k�d�c�@�f���̕��ł��낢�낲�w�삢����������ł����A���ǁA���̂܂܂̉�H�Ŏ������Ă��܂��܂����B���ꂩ��e�X�g���܂��B�͂t���ō������A�d���������Əo�Ă���̂ł��������ł��B�݂Ȃ��܁A���肪�Ƃ��������܂��Bm(_ _)m �܂��A���W�b�NIC����������X�y�[�X�͊m�ۂł��܂���ł����BCPU�̔��M�������̂ŁA����͂��̂܂܍s�����Ƃɂ��܂��B2SA���g������H�ŋ쓮���Ă��܂��B
- �����x�Z���T�[�@�H���̂�ł��B�R���f���T��0.1��F�A��R��1M���ɂ��āAPWM�v���ŐM����荞�݂��s���܂��B���Ɏg�����͕s���ł����A���Ă݂��������̂ł��܂����B�����ł��B�R���f���T�́AIC�\�P�b�g�̒��ɓ����H���Ă��܂��B
- R/C��M�@�@GWS��4ch��M�@�ł��B�T�[�{����M���Ɠ����p���X�ł��̂ŁA���ڃ}�C�R���ɓ��͂��ăJ�E���g���A�v���O�����Ŏg�p���܂��B�d����CPU�����狟�����Ă��܂��B
�����C���{�[�h
�}�C�R�����ڂ�܂��B���ʂɃR�l�N�^�������A���ʂɃ}�C�R���A��ʂ�R/C��M�@�ƃX�C�b�`�^�Z���T�{�[�h���ڂ�܂��B
- I2C�V���A��EEPROM�@������ڂł��B�R�Q�j�o�C�g�̂��̂ł��B����X�N���v�g�⏉���ݒ�l�����L�^���܂��B�M������2K����5V�ɂ��Ă��܂��B�A�h���X�O�Ŏg���Ă��܂��B
- �d���d���Ď��p�d�����z��R�@100K�I�[���̒�R�Q�Ō��d���d�������āA�A�i���O���͂ɓ���Ă��܂��B
- �T�[�{����M���[�q�@���E9ch���A���v18ch�̐���M���ƃO�����h��[�q�ɏo���Ă��܂��B�T�[�{�쓮�d���͕ʓr�T�[�{�ɋ�������\��ŁA���̊�ɂ͈�������ł��܂���B�܂��A���̃R�l�N�^��G-Tune�̃��J���ɌŒ肳��܂��B14P���g�p���Ă���̂́A�����̊g�������l���Ă̂��Ƃł��i�܂��܂��g������C�H�H�H�j�B
- �d���o�b�N�A�b�v�@�d�C��d�w�R���f���T0.22F���R����ɂȂ��Ń}�C�R���Ǝ�M�@�̏u���Ƃ��Ă��܂��B�ψ���3.3V�ł��̂Œ���ɂ��đψ��A�b�v���܂����i�R���f���T�́A����ɂ���Ɨe�ʂ͌���Ƃ̂��ƂȂ̂Œ��Ӂj�B���ꂼ��̃R���f���T�ɓd�����ϓ��ɂ�����悤�ɂ��邽�߂ɁA100K���̒�R�����œ���Ă��܂��B����A�d�����T�[�{�d���Ƌ��p���邽�߁A���[�^�[�N���d���Ȃǂɂ��d���~����ł��B�v�Z�ł͖�1.5�b�̊ԁA�d�������S�ɗ����Ă����v�i�ȃn�Y�j�ł��B���ʂ���̂��ǂ����͂킩��܂���i^_^;
- AKI-H8/3664�@�}�C�R���ł��BH8/3664�P�ł��B�ق�Ƃɑ��v���H�Ƃ��������ł����A���v���Ǝv���܂��B
�Ƃ肠���������`�F�b�N�ƁA�d���d���̊m�F�͍ς݂܂����������͂����Ɠ������ȁH�H�H��H�}�́A���̂Ƃ��듪�̒��ɂ����Ȃ��̂ŁA���Ԃ��ł�����A�b�v���܂��B
H8/3664 Interface
Mapping
H8/3664�̊e�[�q�́A�ȉ��̂悤�ɐڑ����Ă��܂��B�����������Ă��Ă����܂���B���̓����ł��B�ŋ߂́A���̎�̃h�L�������g�AHTML�G�f�B�^�ō���Ă��܂��āA��������̂܂܍ڂ��Ă܂��B
| PORT1 | ���o�̓|�[�g�i�v���A�b�v�j | |
| P10 | �����{�^���X�C�b�`�O | |
| P11 | �����{�^���X�C�b�`�P | |
| P12 | �T�[�{���� | |
| P14 (IRQ1) | �T�[�{���� | |
| P15 (IRQ2) | �T�[�{���� | |
| P16 (IRQ3) | �T�[�{���� | |
| P17 (IRQ4) | �T�[�{���� | |
| PORT2 | SCI3�����˂��|�[�g | |
| P20(SCK3) | �\�� | |
| P21(RXD) | SCI | |
| P22(TXD) | SCI | |
| PORT5 | ���o�̓|�[�g�iP50-P55�̓v���A�b�v�j | |
| P50(WKP0) | �T�[�{���� | |
| P51(WKP1) | �T�[�{���� | |
| P52(WKP2) | �T�[�{���� | |
| P53(WKP3) | �T�[�{���� | |
| P54(WKP4) | �T�[�{���� | |
| P55(WKP5/ADTRG) | LED���� | |
| P56(SDA) | �V���A��EEPROM(SDA) | |
| P57(SCL) | �V���A��EEPROM(SCL) | |
| PORT7 | ���o�̓|�[�g | |
| P74 | �����x�Z���TX | |
| P75 | �����x�Z���TY | |
| P76 | LED���� | |
| PORT8 | �^�C�}�o�͌��p�̓��o�̓|�[�g | |
| P80(FTCI) | �T�[�{���� | |
| P81(FTIOA) | �T�[�{���� | |
| P82(FTIOB) | �T�[�{���� | |
| P83(FTIOC) | �T�[�{���� | |
| P84(FTIOD) | �T�[�{���� | |
| P85 | �T�[�{���� �i�v���_�E�������j | |
| P86 | �T�[�{���� | |
| P87 | �T�[�{���� | |
| PORTB | �A�i���O���͂����˂����̓|�[�g | |
| PB0(AN0) | �����Z���T�O | |
| PB1(AN1) | �����Z���T�P | |
| PB2(AN2) | GND | |
| PB3(AN3) | �d���d�� | |
| PB4(AN4) | ���V�[�o���� | |
| PB5(AN5) | ���V�[�o���� | |
| PB6(AN6) | ���V�[�o���� | |
| PB7(AN7) | ���V�[�o���� | |
GWS���ԁA�܂��܂�����
ROBO-ONE �G���g���[���P�U�AE-VIS�ŎQ�����Ȃ��Ղ������烁�[�����܂����B�����AGWS
S03T�ŕ����Ă��܂��I�������ł��B�M���ł��i���{������L�̕��́A�C�P�Ă܂��j�BG-Tune�͂܂��������Ă��܂���B���남��B�ł��A����{�[�h���ł������A���T��������������邩�ȁH���قفB
| �^�N�g�X�C�b�`���āA�����Ȃ��Ă���ł��ˁ` |
���߂Ẵ^�N�g�X�C�b�`
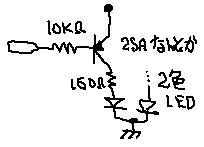
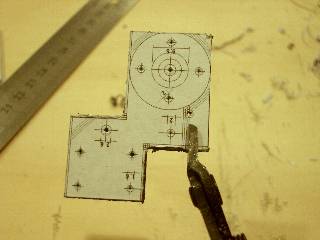
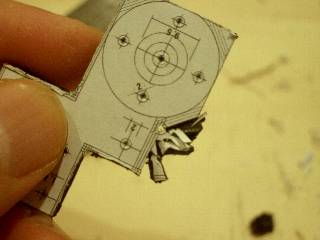
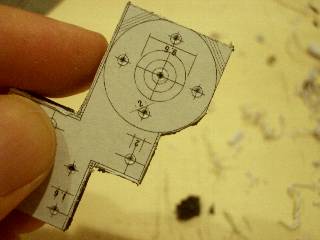
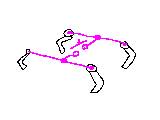 ����A���߂āu�^�N�g�X�C�b�`�v�Ȃ���̂��g���Ă݂邱�Ƃɂ��܂����B�����S�{����܂��B���[��A�ǂ��Ȃ��Ă���낤�H�Ǝv���ăe�X�^�ĂĂ݂���A�u�����A�����Ȃ��Ă����̂����v���Ă��������ł����B���ꂪ���̐}�ł��B�����ƁA�ڂ������ɂ͂�����܂��Ȃ�ł��傤���LjӊO�ł����B
����A���߂āu�^�N�g�X�C�b�`�v�Ȃ���̂��g���Ă݂邱�Ƃɂ��܂����B�����S�{����܂��B���[��A�ǂ��Ȃ��Ă���낤�H�Ǝv���ăe�X�^�ĂĂ݂���A�u�����A�����Ȃ��Ă����̂����v���Ă��������ł����B���ꂪ���̐}�ł��B�����ƁA�ڂ������ɂ͂�����܂��Ȃ�ł��傤���LjӊO�ł����B
�Ƃ������Ƃ́A�Е��Q�{�����z�����Ă����ON/OFF�ł����ł��ˁ`�B���X���ł��B�O��́A�X���C�h�X�C�b�`���g���Ă�����ł����A����́A���̃X�C�b�`�ŁA�u�f���X�^�[�g���I�v�Ƃ���낤�Ǝv���܂��B�\��ł͂Q���āA�u�����Ȃ���X�^�[�g����ƃf�����[�h�v�A�u�X�C�b�`�P�������ƃf���P�v�A�u�X�C�b�`�Q�������ƃf���Q�v���Ċ����Ŏ������āA���ꂼ��u���O�R���p�v�Ɓu�\�I�p�v�ɂ��悤�Ǝv���܂��B
| �����x�Z���T���Ă݂悤���Ďv���ĥ�� |
�Ȃ��Ȃ��w�����������x�Z���T
���������ς�炸����{�[�h�̕��A�ꐶ��������Ă��܂��B�v�ɖ��������邹�����A�Ȃ��Ȃ���ςł��B��ŁA����ɏH���̂`�c�w�k�Q�O�Q�����x�Z���T���ڂ��悤�Ǝv������ł����A�t�����Ă���A���s���őf���ɂ͂t������ƁA���\�ȍ����ɂȂ��Ă��܂��āA�s���w�b�_�œ�K���Ăɂ�����̓����ɂ��悤�Ƃ�����A���Α��ɂ������Ă��܂��Ă��邱�Ƃ��ł��܂���ł����B����Ȃ킯�ŁA�e�B������������
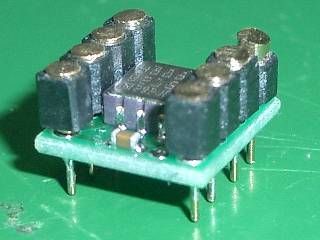
����ȕ��Ƀs�������Ă݂܂����B�A���s���̃\�P�b�g���Ɏh���s���̕��ɂ��Ă݂���ł����A����ł����\��������ی��\�P�b�g�Ɏh�����Ă���܂��B����ǂ��ł����G���Ă��܂���B�ی��ŁA����Ƀv�����r�j�e�ł����܂��Ă����Α��v�ł��傤�B���̑����i�ɂ��ẮA����������̃z�[���y�[�W�iOKADA Official Site�j���Q�l�ɂ����Ă��������܂����B�Ƃ����킯�ŃA�i���O�ڑ��ł͂Ȃ��A�f�W�^���H�ڑ��ł��B�u�܂�H8/3664�ɂȂ��́`�H�v�Ƃ��������������Ă������ł����A�܂��܂��s���܂��B�����x�Z���T�̐M�����J�E���g����A�C�f�A�͂���܂��B�ӂ��ӂ��ӁB�I�g�R�̘Q���Ȃ̂ł��B
���s�����̂ͥ���A���s���A�������Ă���K���ɐ������A�Ǝv���Đ�ɂ͂t�����Ă��܂�����ł����A���A�������ɂ�����Ƃ��l�i�̍������i�A�\�����������肵�Ă��ē��̂��j�b�p�Ő�Ȃ��������Ȃ킯�ŁA�����������X���������܂����B���������������܂�����A��ɘA���s�������H���Ă���͂t������邱�Ƃ������߂��܂��B
����͂����ƁA�H���̉����x�Z���T�A�����Ĕ̂����Ƃ����ł���ˁ`�B����n�߂Ďg���̂ŁA�g�p���Ƃ��͂킩��Ȃ���ł����A�Ȃɂ����҂ɋ����c���ł��܂��p�[�c�ł��B�������A���������Ȃ��ł��B��������Ǝv���ƕs���ł��ˁ`�B
�������A���Ă݂����̂́A���Ɏg�����E�E�E
| AKI-H8/3664������Ă܂����B��Ŕ����I |
LED�̃h���C�u��H������Ă����祥�
���Ђ̂��킢��AKI-H8/3664�A���Ă܂����B�ȑO�A�����M�ɉ��x�����Ȃ���Ă���A�T�[�{����Ƃ������܂ɂł��Ȃ��Ȃ�Ȃ��A�\�t�g�̕s����Ȃ����Ďv���Ă��܂����B�������A�����A�g�����W�X�^��LED���h���C�u�����H�̎��������Ă�����ł��˥��LED�������ςȂ��ŏ����Ȃ���ł��B
 ����ȉ�H�ł��B�d�q��H�A�S�R�_���Ȃ�ŁA�ǂ����Ō�������H���莝�����i�ł���Ă܂��B�Q�F�k�d�c���g���Ă݂���������ł����A�}�̒ʂ�A�f�m�c���ɂȂ��������ʂȂ̂ŁA�z�����݂��g���Ȃ��Ȃ��Ƃ������ƂƁA�X�y�[�X�I�Ƀ��W�b�N�h�b���P�ڂ���̂����������̂ŁA�g�����W�X�^�h���C�u�ɒ���I���Ċ����ł��B
����ȉ�H�ł��B�d�q��H�A�S�R�_���Ȃ�ŁA�ǂ����Ō�������H���莝�����i�ł���Ă܂��B�Q�F�k�d�c���g���Ă݂���������ł����A�}�̒ʂ�A�f�m�c���ɂȂ��������ʂȂ̂ŁA�z�����݂��g���Ȃ��Ȃ��Ƃ������ƂƁA�X�y�[�X�I�Ƀ��W�b�N�h�b���P�ڂ���̂����������̂ŁA�g�����W�X�^�h���C�u�ɒ���I���Ċ����ł��B
���̉�H�̘b�͌�ł���Ƃ��āA��łł��ˁAH8/3664�̏o�͓d���𑪂��Ă݂���A�Ȃ�Ƃ݂�ȁu�R�D�T�u�����Ȃ�������v�Ȃ�ł��B�n�[�h�E�F�A�}�j���A���݂����āA�����̍~����H�g�p�iAKI-H8/3664�́A����ł��j�ɂ������āA�o�͓d���͂u�b�b������ď����Ă��邵�ς��Ȃ��Ǝv�����킯�ł��B����Ȃ킯�ŁA�V����AKI-H8/3664������Ă݂��祥��u�T�u�����Ƃł邶����v�@�ƂقفB����ρA���Ă�����ł��ˁB�x�d�Ȃ钴���M�ŁA�ǂ���������Ă�����ł��傤���H�ł��A�v���O�����͏������߂邵�A�R�D�T�u�Ȃ���o�͂͂ł��邵�B�Ӂ[�ށB�V���A��EEPROM�̏������݂������Ƃł���̂ŁA�������̃f�o�b�O�p�ɂ��悤���Ȃ��B
�����������������邱�Ƃ�����悤�ł��̂ŁA�݂Ȃ���A�C�����܂��傤�B���X�A�o�͓d���𑪂��Ă�����Ƃ�����������܂���i�j�BA/D�R���o�[�^�Ŏ��Ȑf�f�Ƃ������k�ł��B
�V����AKI-H8/3664�A������ƈႤ�]�H AKI-H8/3664���Ă��炵���I�����āA�V�����̂��Ă��A��������\1600�B�Ƃ����킯�ōw������AKI-H8/3664�ł����A�ʐ^�̍����Â����A�E���ŋߍw���������̂ł��B�ȑO�A�w���������̂ƁA��̐F�������ɈႢ�܂��B�܂��ACPU�ɏ����Ă��镶�����Ⴂ�܂����ACPU�̕������͂�����ǂ߂�̂��킩��Ǝv���܂��B����ɁA�u�t�����Ă���s���w�b�_�^�R�l�N�^�̔w���Ⴂ�v�ł��B�C���t�����ɑg�ݗ��Ă����ɂȂ��Ă�����Ƃ�����܂����B�ł��A����ȂƂ���Ŕw�̒Ⴂ�s���R�l�N�^�Ƃ���ł���Ȃ�ă��b�L�[�I
AKI-H8/3664���Ă��炵���I�����āA�V�����̂��Ă��A��������\1600�B�Ƃ����킯�ōw������AKI-H8/3664�ł����A�ʐ^�̍����Â����A�E���ŋߍw���������̂ł��B�ȑO�A�w���������̂ƁA��̐F�������ɈႢ�܂��B�܂��ACPU�ɏ����Ă��镶�����Ⴂ�܂����ACPU�̕������͂�����ǂ߂�̂��킩��Ǝv���܂��B����ɁA�u�t�����Ă���s���w�b�_�^�R�l�N�^�̔w���Ⴂ�v�ł��B�C���t�����ɑg�ݗ��Ă����ɂȂ��Ă�����Ƃ�����܂����B�ł��A����ȂƂ���Ŕw�̒Ⴂ�s���R�l�N�^�Ƃ���ł���Ȃ�ă��b�L�[�I
����Ȃ킯�ŁA�]���̃s���w�b�_���ǂ��ꍇ�́A�ꏏ�ɕ��ʂ̃s���w�b�_���I�[�_�[��������������������܂���B���́A�s���w�b�_�͎莝��������܂������A�w�̒Ⴂ�s���R�l�N�^���~���������̂ŁA���傤�ǂ悩�����ł��B���Ȃ݂ɁA�\�ʑ��̃s���w�b�_�Ɏg�p���܂����B���~���ł����A��̍������Ⴍ�Ȃ��Ă��������ł��i�ł��A�悭�l���Ă݂�A�����s���w�b�_�ł��J�b�g����悩������ł��ˁj�B
LED�̃h���C�u���Ă݂���ł������
���āA��L�̉�H��LED�h���C�u���Ă݂���ł����A�_���͂����ł����ǁA��������Ə������Ȃ���ł���ˁ`�B�ǂ����Ă��낤�H�ق�̏��������ALED�����Ă��܂���ł��B�e�X�g��H�ŁA�x�[�X���ɂ������Ă���d����������Ɨ����Ă���悤�Ȃ̂ŁA���ꂪ�������Ȃ��Ďv����ł�������B�܂��A�Ƃ肠�������̂܂܉�H�ڂ��Ă��܂������ȁB
| G-Tune�̎��[�����݃i�� |

����{�[�h����ĊJ
��������A��肩���Ă�������{�[�h�̕��̐���ɓ���܂����B���[��A�Ȃ��Ȃ��������B������f�l�B�v���炵�Ė���������܂����B�o���オ������ʐ^�ڂ��܂����A��̕\�Ɨ��A���ʂɃR�l�N�^��z�u����̂�����Ȃɑ�ς��Ȃ�Ďv���܂���ł����B
�������Ⴈ������`
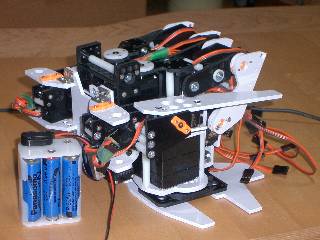
����Ȃ킯�ŁA���x�߂�G-Tune��G���Ă��܂����B������������ł��B���\�A�������Ⴍ�����߂邱�ƂɋC�������̂ŁA�ʐ^�ڂ��܂��B��S��ROBO-ONE�f���̎��ɁA�R���p�N�g�ȏ�Ԃ���N�����铮�����点����ł����AG-Tune
2004F�����������Ȃ���ł������ł��B���[�����Q�œ��{�̏Z���ɍ����Ă���悤�ȋC�����܂��i�j�B����ɂ��Ă��A���̏�ԂȂ牣���Ă��|���C�����܂���B�h��̐��Ƃ������āA�u���B�����K�B�����v�`�ԂȂ�Ăǂ��ł��傤���H
���`��A�R���p�N�g�ȏ�Ԃ��炩�A��s�`�ԁH���炩�A�f���͂ǂ�������X�^�[�g�ɂ��悤���Ȃ��B
| �{���ɍڂ���������ROBO-ONE�G���g���[�ʐ^ |
�{���A�悤�₭���J�̂��ꂱ��C�����I���܂����B����Ȃ킯�ŁA�����A�S�Ẵ��J���i��ڑ����邱�Ƃ��ł��܂����`�B�����A��ςł����B�ȑO�ɂ����b���܂������AROBO-ONE�G���g���[�̎ʐ^�́A�ڂ��Ă��邾���̃p�[�c���������肵�āA�܂������ɗ��ĂĂ������Ƃ����ł��Ȃ�������ł��B�ł��A����͈Ⴂ�܂����B
�Ƃ����킯�ŁA�c��͐���{�[�h�A�z���A�d���A�\�t�g�A����ݒ�Ƃ����Ƃ���܂ł��܂���������āA���\����܂��ˁ`�B
G-Tune
(2004F)�̖{���̎p�Ƃ́I�H
�{���̂���A�u�{���ɍڂ���������ROBO-ONE�G���g���[�ʐ^�v�́A����ł��I�����A�Ȃ���킩��Ȃ��`�ł��B�\�Z�̓s����A�F����Ԃ��ړ�������A����ړ������肷�邱�Ƃ͂ł��܂��A����Ȍ`�ɂȂ邱�Ƃ��ł��܂��B���i�������Ɛڑ�����܂����̂ŁA�悤�₭���̑̐����ł���悤�ɂȂ�܂����B
�ق�Ƃ́A���ꂪ�G���g���[�̎��ɂł��Ă�����肾�����̂ť���ƁA�ƁA�Ƃ������Ƃ́AROBO-ONE�G���g�����瑁�Q�T�����o�߂��Ă���̂ť�������A�l����̂͂�߂Ă��������ƁB

����̃f�U�C������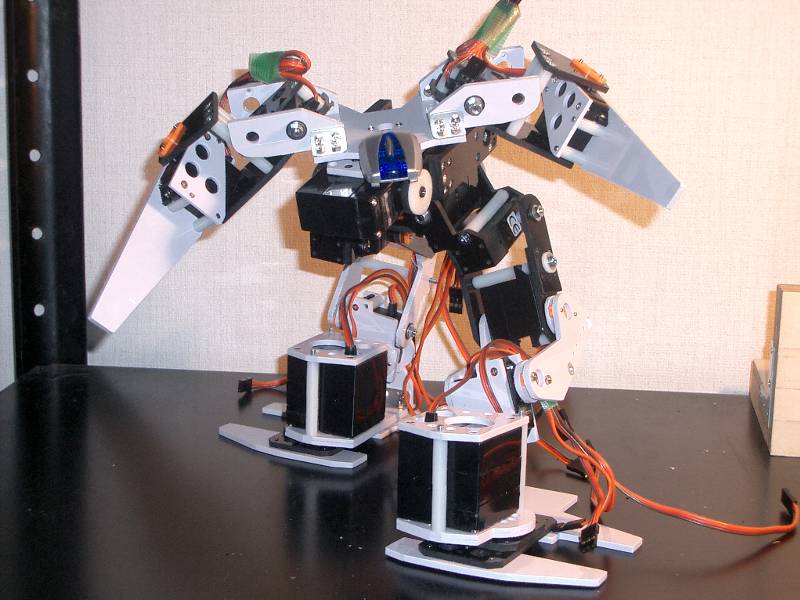

�킩��ɂ����ʐ^�����ڂ��Ă��Ȃ�ł��̂ŁA���ꂪ����̃f�U�C���ł��B320x240�ł��ƁA���Ƃ킩��ɂ����̂ŁA�N���b�N����Ɗg��ł���悤�ɂ��܂����B���������ł��̂ŃN���b�N���Ă݂Ă��������B
��������Ă݂�ƁAROBO-ONE�G���g���[�ʐ^�ƈ���āA�uG-Tune�v���Ċ������܂��H��ɂ���ċr�͋t�Ԑڂł��B�d���́A�X�l�i�Ƃ������ӂ���͂��Ƃ����܂����j�ɕ��U���ė����ɓ��ڗ\��A�}�C�R���Ȃǂ́A�o�b�N�p�b�N�`���ɂ��悤�Ǝv���Ă��܂��B
���ƍ��̂`�a�r�ŁA�r�A�r�̐�[�p�[�c�𔒂ɂ��Ē������������ɂ��邱�ƂŁA�X�}�[�g���ۂ����o���Ă��܂��B����Ƀ��[�������^�C�v�ł��B�T�[�{��S03T��MICRO-MG���g�p���Ă��܂����A�Ȃ�ׂ�S03T�ōςނƂ���́A�������ɂ��Đ������������Ă��܂��B���̃f�U�C���ň�ʂ蓮���Ă����A�\��ʂ�A�S���݂łW���̓L�[�v�ł������ł��B�܂��A�T�[�{�̔��Ύ��́A�قƂ�ǃT�[�{�P�[�X�ɒ��t�����Ă��܂��i���͂��ꂪ��ԕs���j�B
�E�̎ʐ^�ł킩��܂��悤�ɁA�����u���u���܂��̂ŁA���\�A�������������ł���悤�ɂȂ�\��ł��B���ɂ��ғ��͈̓`�F�b�N�̂��߂Ɏ�����A�������ʐ^�i�傫�����ł͌����܂����n�㍂�S�O�����̒��n�C�L�b�N�Ƃ��㉺�Ђ�����Ԃ��Ă����Ȋi�D�Ƃ����X�B�d�������Ŏp���ێ����ł��Ă���̂ŁA�Ђ���Ƃ�����ł��邩�ȁ`�Ȃ�Ďv���Ă��肷���ł����A�܂��܂����ꂩ��ł��̂ŁB���قفB�ʂĂ��Ȃ����ł������܂��B�j������̂ł���������ۂɂ����܂œ��삳����邩�ǂ����낤���̂ŁA���J�͉���������ɂ��܂��B�e�p�[�c�̊g��ʐ^�́A���삳���Ă݂āA�\����̖�肪���邩�ǂ��������������炢�ɐ������Ă��������܂��B
���g���@�Q�T�����@�̏d�@�P�D�T�����i���Ԃ�ꂻ���ł��B���݁A�P�����W���X�g�I�j
���r�̒����@�P�X�����@�ł��v�~�X�ő����͂P�W�����~�O�D�V���ő咷�Ő���
����ޗ��@�`�a�r�@�Q�����A�R�����@�����A���~�̃A���O��
���T�[�{���@�P�W
�����@GWS MICRO-MG�@�~�Q
���I�@GWS MICRO-MG�@�~�Q
�������[���@GWS MICRO-MG
�����s�b�`���@GWS S03T
���J�r�@GWS S03T�@�~�Q
�������s�b�`���@GWS MICRO-MG�@�~�Q
���Ђ��s�b�`���@GWS MICRO-MG�@�~�Q
������s�b�`���@GWS MICRO-MG�@�~�Q
�����[�����@GWS S03T�@�~�Q
�����[���@GWS S03T�@�~�Q
����ɂ��Ă�
���[��A�g���X�A�܂����_�B��ł��ɂ��ɓ������Ă�����i�b�g�������Ă����B���̌�A�ʂ̏ꏊ����r�X���B���ߖY��ł͖����̂ŁA�ǂ����\����A�������Ɗɂ݈Ղ��͗l�B��������l���Ȃ��ƁB
| �`�a�r���H�E�j�b�p�Ńp�b�L���p�b�L�� |
����A�F�l�Ƙb�����Ă�����u�`�a�r�ŕ��G�Ȍ`�̂���Ăǂ�����ĉ��H���Ă�́H�v�Ƃ������₪����܂��āA���ƁA�蔲���e�N�j�b�N�H�����J���Ă��܂����Ǝv���܂��B���傤�ǁA���A�C�����i������Ă���Ƃ���Ȃ̂ŁA����̎ʐ^���ڂ��܂��B
���܂����`�ɂȂ��Ă���ƁA���X�������Ő��`����̂���ςł����A�o�J�b�^�[�Ő藎�Ƃ��Ă����̂��͂�����Ȃ��đ�ςł��B����ȂƂ��A�����ł̓j�b�p���g���Ă��܂��B
������A�}�l�������ꍇ�́A�K�����K�l�i�ɒB�łn�j�ł��j�������Ă���Ă��������B���\�A������ς����K���K����щ��댯�ł��B
 |
�܂��A�g���j�b�p�ł����A�v�����f������ɍœK�I�炵���j�b�p���g���Ă��܂��B����́A�ȑO�A�~�j�l��Ƃ�����Ă��Ƃ��ɔ��������̂ł��B�ǂ������낤�HTAMIYA�̂��̂��Ǝv���Ĕ�������A��������Ȃ������Ƃ����L��������܂��B ���������A�͌^������Ȃ��āA�z�[���Z���^�[�Ƃ��ł������Ă���̂���Ō����āA�������̕������������̂ʼn����������L�������łɑh���Ă��܂����B |
 |
���ʂ��猩��Ƃ킩��̂ł����A�ƂĂ����^�ŁA�ʐ^�̌����ŁA���ʂ̌`�����ʂ̃j�b�p�ƈႢ�܂��B���ʂ̃j�b�p�i�d�H�p�j�́A���ʂ��ւ���ł���̂ł����A����͕��ʂɋ߂��`�����Ă��܂��B ���̂����肪�v���p�Ɠd�H�p�̈Ⴂ�̂悤�ł��B |
 |
��ł͂��������B �����܂ł�P�J�b�^�[�ŃJ�b�g���Đ�o���܂����B�E���̑�`�������j�b�p�Ő�o���܂��B |
 |
�܂��͐����ɥ�� ���ꂾ�ƁA��Ȃ����A�Ȃ�ςȂ��ƂɂȂ肻���ł��B�Ȃ���Ȃ���ł��傤�H����́A�ޗ��̓���������������ł��B �j�b�p�ɂ́A����Ȃ�̌��݂�����܂��̂ŁA�ޗ��������o����܂��B����̓������������̂ł��B �W�F�b�g���O�������̌`�Ŏ��p������Ȃ��Ƃ̓������R���Ǝv���܂��B�@�����y�͂��������ǂ��ցH�H�H |
 |
�����ť������Ȋ����ŃU�N�U�N�ƁA��������ƁA�ǂ�ǂ�邱�Ƃ��ł��܂��B�ŏ��͐��Ă���[�����܂��B�������邱�ƂŁA�ޗ��̓�����������A�����Ȃ��邱�Ƃ��ł���悤�ɂȂ�܂��B |
 |
�͂��A�����Ԑ�Ă��܂����B ���x������Ă���ƁA�ǂ̒��x�܂ł�����ɐ荞�߂邩�킩���Ă��܂��B |
 |
�Ō�ɁA���̒Z���̂悤�Ȃ�����ς���藎�Ƃ��Đ��`���܂��B����łł�������ł��B ���̊p�̊ۂ݂Ƃ����A���������Ő�܂��B�����āA�Ō�Ƀ��X���Ő��`���܂��B ���Ȃ݂ɁA���̕��i�A�����p�̌��ȊO�ɂ́A�܂������������Ă��܂���B�h�����n���v���X�`�b�N�p�ɉ��H���Ă���g���悤�ɂȂ��Ă���Ƃ������̂́A���i�����ł��Ƃ��A�ςȗ͂������邱�Ƃ��Ȃ��Ȃ�܂��āA�ŋ߂́A���ꂭ�炢�̃T�C�Y�̕��i�Ȃ�A��ɑ�G�c�ɃJ�b�g����Ƃ���܂ł���Ă��猊�������Ă��܂��B
|
| ���������� |
�����܂��Ă��߂łƂ��������܂��I����`�A�����͂����̂�������V�C�悭�A�g���Ȍ䗈�����オ�肫�������̉��K�Ȗڊo�߂ƂȂ�܂����B�݂Ȃ��܁A�ǂ̂悤�Ȃ����������߂����ł��傤��?�����͌��\�A�o�^�o�^���Ă��ĕ��ʂɉ߂����Ă��܂��B�N���͏o�������������̂ŁA�Ƒ��Ƃ̎��Ԃ�D��ł��B
���N�������b�ɂȂ�������y���A�����̃z�[���y�[�W�����Ă��������Ă���݂Ȃ��܁A�{�N����낵�����肢�������܂��B���N���A�C�f�A����čs���܂��B
���`�āA�悤�₭�����胍�{�b�g����ĊJ�ł��B�}�C�y�[�X�łڂ��ڂ��ƍs���܂��ˁ`�B