|
おほほ。ROBO-ONEビデオ観てます。 |
三月兎様からDVDが届きました。どうもありがとうございます!当日、てんぱってましたので、本当に楽しめます。いや〜、おもしろいです。はぁぁぁ、ROBO-ONE、いいっス。
あと、今日、出張でハンズのそばを通ったので、「ソルボセイン」買ってみました。明日にでもレポートしますね。ては、まだまだDVDの続きを観ますので、これにて失礼!
|
すごそうなモノ出ますね〜 |
今日はちょっと情報系ページっぽいですが、気になるのでアップします。
小型人型ロボット組み立てキット
iXs Research
Corporationさんから、小型人型ロボット組み立てキットの予価が発表されました。おお、12万切っています。すばらしい!セット価格って、どこまで含まれているんでしょう?3社共同開発されているとのことですから、きっと、サーボ、フレーム、コントローラ(ホームページに掲載されていた順)全部ありなんでしょうか?う〜む、すごいです。今のところ、細かな情報は見えてないですけど、サーボとかってどんなもの使っているんでしょうか?すごいなぁ。なんか、お父さんのお小遣いで二足歩行!のSISO
JUNK STUDIOの存在意義が…くらくら…ひらひら…へらへら…
よく見ると、ちょんまげの啓三くん(この名前、かなり好きです)とよく似ている気がします。いや、きっとベースとかプロトタイプかもしれません。というわけで、写真を拡大してチェックしてみました。違うところ…腕サーボの組み方が違う、サーボのラベルカラーが違う(ちょんまげの啓三くんは赤)、ちょんまげがついていないが代わりにサーボがついている、カゴに入っていない、かっぽう着を着なくても操縦できそう(推測)…こんな感じでしょうか? いずれ詳細が発表になるとは思うのですが、いやはや、すごいです。これにシリアル通信の無線機器か、マイコンかましてR/C受信機つけたら無線操縦OKって感じです。
早く詳細知りたいですね〜!
Best TechnologyさんのH8
Tinyシリーズ
新ボード、本日より発売。さっきBest
Technologyさんのホームページを見にいったら、商品カタログの方に並んでいました(前からだったかどうかは、実は知りません^^;)。この、H8/3694Fを使ったマイコンボード、BTC064が気になります。何がって、サイズです。すごく小さいです。秋月のものよりぐぐっと小さいです。しかもクロックが20MHzですね〜。そんでもって、H8/3664とほぼ互換とのこと。どれくらい互換性があるのかはよくわかんないので、とりあえず、ピン数とかポート数とかチェックしてみたんですが、同じようです。ヘッダファイル(GDLの)を見てみたら、SIPHA-COREで使っているI/Oでは、IICまわりがちょっと違う?ぐらいと思われます。また、クロックが20MHzというのも、タイマWで20msecとかを測っている限りでは、それほど問題にはならないと思います。4KBitのシリアルEEPROMがついていますが、どうやったらEEPROMを切りかえれるか?とかはわかっているんで問題無さそうです。それより、初期値はボードに実装されているやつ、動作データは外部EEPROMなんてのもできそうですね〜。
SIPHA-CORE、今、3段積みなんですが、このサイズなら2段積みにできるんではないかと。うん、ギリギリ入りそうです(とにかくG-Tuneにはスペースが無いんです)。しかも、ソースコードの方も、ひょっとしたらコンパイルオプションで切り替えるぐらいでいけそうかな〜。一個、買ってみようかな〜。うーん、うーん、うーん。大会の時に、Best Technologyの方に声かけてもらったしな〜。一個といわずニ個ぐらい買ってみようかな〜。
|
SIPHA-COREの回路図 |
SIPHA-COREの回路図もドドンと公開…するほどの物?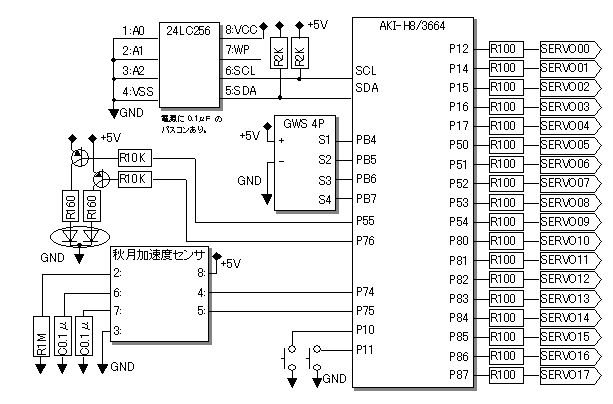 ご参考までにって感じですが、SIPHA-COREの回路図をアップします。最近は、反省ともに、ここまでやってきたことを振り返り中で、この手の情報は、今後もちょくちょくアップすると思います。これが、結局、最後までちゃんと実装されていた回路です。
ご参考までにって感じですが、SIPHA-COREの回路図をアップします。最近は、反省ともに、ここまでやってきたことを振り返り中で、この手の情報は、今後もちょくちょくアップすると思います。これが、結局、最後までちゃんと実装されていた回路です。
これ以外には、電源回路が2系統あります。マイコン用とセンサ用です。最初はいろいろ予定…夢があったのです。途中で散っていきましたが。マイコン用の方は、でっかいキャパシティが噛ましてあって、瞬停バックアップができるようになっていた(過去形)もので、センサ用は、容量多めな0.5Aをつけています。シャープの距離センサをつけたかったんです。でもコネクタをつけただけで、それ以上は…。
そういえば、加速度センサもついていますが、値の取り込みまでしかしておらず、制御には使えていません。これからプログラム考えるところです(笑)。あとは…なんか電源電圧監視用の回路を入れていたような…。
でも、書いてみて思いました。「さすが、全部ダイレクトにつながっているだけあって、シンプル!」…ということは、書く必要も無かったような…。
WideStudio、その後 ごちゃごちゃ触ってみたり、ネットでいろいろ見てみるものの、イマイチ、感覚がわからないので、書籍を購入しました。とはいっても、家の周りの本屋では見当たらなかったので、「よし、amazon.co.jpとやらを使ってみよう」と、昨日思ったんですよ。んで、昨日のお昼頃オーダーしました。そうしたら、「もう届いている」ではありませんか!はや〜い。びっくりです。
ごちゃごちゃ触ってみたり、ネットでいろいろ見てみるものの、イマイチ、感覚がわからないので、書籍を購入しました。とはいっても、家の周りの本屋では見当たらなかったので、「よし、amazon.co.jpとやらを使ってみよう」と、昨日思ったんですよ。んで、昨日のお昼頃オーダーしました。そうしたら、「もう届いている」ではありませんか!はや〜い。びっくりです。
|
ものの大きさの説明はムツカシイ |
トップのG-Tune写真変えてみました
トップの写真をG-Tune 2004Fに変えてみました。2003A(for
Tシャツ)、お疲れ様。前のやつを作ってくれたK氏、ども、ありがとう。ちゃんとリンクは残しておきます。
さてさて、トップの写真、実は、黒い天板のコタツの上で撮って、それをコントラストとか調整して、ちょっとだけレタッチ(右上の光のモト)したんですが、なかなかかっこいいかな〜って感じにできたと思います。でも、あれだけみたら、「ロボットのホームページ」に見えないかも…。なにかのゲームっぽい?
デザインコンセプト よく、知人から、2003Aと2004F、デザインだいぶかわったよね!とか言われたんですが、あまり変わっていないと、本人は思っているので、並べて写真を撮ってみました。
よく、知人から、2003Aと2004F、デザインだいぶかわったよね!とか言われたんですが、あまり変わっていないと、本人は思っているので、並べて写真を撮ってみました。
いかがなもんでしょうか?奥がG-Tune 2003A、手前がG-Tune 2004Fです。まあ、違うといえば違いますが、大まかなシルエットは結構、似ていると思いますし、イメージ的には、開発初期モデルと後期モデルって感じしませんか?
内容的には、腕に積んでいたバッテリを脚に積んだり、リンク脚を撤廃したりいろいろしていますが、シルエットは、「よりスマートでエレガント」なものを目指したつもりです。あえて逆間接を選んだのも(ここだけの話、サーボの動きを考えると、歩行速度は正間接の方が上げやすいと思います)、イメージキープのためです(笑)。いやいや、簡単に言えば、「かっこいい」と思っているからです。こっそりと逆間接で速く歩く方法も研究中…パワーが無いところがツライんだよね〜。
大会の時、よく言われたのが…
「え?小さい!」です。私のことではありません。私はどちらかと言うと、かなり大きい方です。G-Tuneは、身長25cmですから(よく考えると、あのかっちょいいARK01より小さい)、それなりの大きさしかありません。でも、25cmっていわれてもピンと来ないと思いますし、単体で写真撮っているかぎり、なかなか伝えるのが難しいんですよね〜。というわけで、比較写真を撮ってみました。
結論から言うと…一番わかりやすかったのが、「トイレットペーパー3本」でした。うぅ。
 |
というわけで、「思い出の一品」知るひとぞ知る、チョコレートパッケージ!と比較です。パッケージには「ワインに合う」ようなことが書いてありましたが、ビターな感じが、バーボンにぴったり!(とか書くと、シロウト〜とか言われちゃうかも。おほほ) 知る人ぞ知るものと比べてもしょうがないです。はい。 |
 |
じゃあ、ってなもんで、次はプロポです。 これは比較的わかりやすい感じですね!持っている方、わかりますか? |
 |
悲しいけど、一番わかりやすかったのがこれです。トイレットペーパー3本。積むと、なんとなくのイメージサイズが同じになることが発覚。 |
|
SIPHA SYSTEMのAction Script |
どどんとAction
Script公開(恥ずかし〜)
会場で、一部の方にお見せしたAction
Scriptなるものの仕様を、ドドンと出してしまいます。どのように呼び出されるか等の基本概念抜きで、こういうのをドンと出してしまうのもなんなんですが、同じように自作派で「なんかスクリプトみたいのできないかな〜」という方の参考になればと思います。これが悪い例ですぅ!な〜んて。
そもそもAction Scriptってなんぞや?という話なんですが、簡単に言えば、世に言う「モーションデータ」っていやつで、ロボットの動作を決めるデータを書くための言語です。SISO JUNK STUDIOオリジナル用語?です。SIPHA-COREでは、どのように動作データを扱っているか?というのがわかっていただけるのでは?と思っています。ちなみに、単位が「度」とか「ミリ」と出てきますが、目標位置に小数点以下は指定できませんけど補完動作中はもっと細かくやっています。
どんなふうにこれを動作デバッグしているかというと、基本的には、RAMデバッグしてEEPROMに記録という形でやっています。
- まずはテキストでこの記述で動作データを作ります。
- SIPHA-COREをメンテモードで起動して、パソコンからH8/3664のRAMに転送します。
- 動作チェックします。きっといっぱい修正します。
- またRAMに転送して動作チェックします。繰り返します。
- 問題なければシリアルEEPROMにパソコンから書き込みます(SIPHA-COREからオンライン書き込みです)。
こんな感じです。これらのデータは、1レコードあたり4バイトのデータブロックで表現するようにしています。
SIPHA-COREは、実行状態に入ると、サーボ制御の隙間を狙ってシリアルEEPROMからこのデータをRAMに展開し、それを実行しています。本当は、ぐいぐいとシリアルEEPROMから読み出して実行したいんですが、ちょっと苦しいです。動作デバッグ時は、この部分に直接パソコン側からロードすることでRAMによる動作デバッグを実現しています。そんなわけで、補完計算とか、二次元座標→サーボ制御値変換などは、すべてSIPHA-CORE側にて行っています。
気になる容量ですが、RAMの関係上、今は1アクションスクリプト200レコードまで、という形になっています。これが多いか少ないか、という話なんですが、事前審査動作データがアクションスクリプト1発で199レコードでした。また、アクションスクリプト間でジャンプもできますし、なにより趣味ですし(笑)、こんなもんかな〜って思ってます。
Action Script
アクションスクリプトは、最大200種類、1Action Scriptあたり200命令の設定を行うことができる。これに記述した内容により、サーボ制御、リモート操作(ラジコンプロポ)による条件分岐、センサーチェックなどを行う。
予約Action Script
| 0 |
アクティブモードで起動時に自動的に実行されるアクションスクリプトデータである。これにより、最初のサーボ位置、起動後の状態を決定する。 |
| 1〜16 |
プロポ指示動作時の、モード切り替え動作(プロポ右スティック)用のアクションスクリプトデータである。 モードはプロポ右スティック位置に対応した、0〜8の9状態によって表されるが、基本姿勢が同じであるいくつかのモードを1モードグループとして扱う。例えば、モード0〜2は直立姿勢、モード3〜5は攻撃姿勢、モード6〜8はしゃがみ姿勢の場合、それぞれをモードグループ0、1、2とし、このモードグループ間を移行するためのアクションスクリプトがこのスクリプトで記述される。 モードグループは0〜3まで設定可能で、対応するAction Scriptは、旧モードグループ*新モードグループで表される。 |
| 17〜97 |
プロポ指示動作時の、コマンド動作(各モードにおけるプロポ左スティック)用のAction Script
Dataである。各モード毎に9動作ずつ割り振られる。 |
| 98〜99 | オートプレイ用スクリプト開始アクションスクリプトで、98がAuto Play 0、99がAuto Play
1に対応。 |
| 100〜199 | ユーザが自由に仕様することができる。主に、オートプレイ用、アクションスクリプト間Jumpを使用した、複数のアクションスクリプトによる動作の実現などに使用する。 |
Command Description
| CEXT: Exit | ||
|---|---|---|
|
アクションスクリプトを終了する。 アクションスクリプトを、任意のラインで終了させる。CRIJ等と組み合わせて使用すると、リモート操作によって終了させるなどのスクリプトを記述することができる。 | ||
|
Command |
EXLV | |
|
Parameter |
Nothing |
|
|
| ||
| CSQT: Sequence Timer | ||
|
次のアクションスクリプトを指定されたステップ後に実行する。 ステップとはサーボ制御周期のことである。サーボ位置制御等、時間指定できるコマンドがこのコマンド以前に実行されている場合、その動作は実行を続ける。 | ||
|
Command |
CSQT, Step | |
|
Parameter |
Step |
ステップ数 |
|
| ||
| CPOS: Position Control | ||
|
サーボ位置を制御する。 前回動作位置からの補完を行って、指定ステップ数で動作を完了する。補完計算は、直線的な単純補完以外に、ゆっくりと動作開始、勢いよく動作開始する動作モードを指定することができる。また、サーボ制御信号OFFをすることもできるが、この場合、BeginMovMode、EndMovMode両方とも「OFF」とすること。 | ||
|
Command |
CPOS, SrvNo, BeginMovMode, EndMovMode, Step, Degree | |
|
Parameter |
SrvNo | サーボ番号(またはサーボID) |
|
BeginMovMode |
サーボ動作開始モード | |
| EndMovMode | サーボ動作終了モード MSFT: ソフト動作(ゆっくり動作終了) MLNR: リニア動作 MHRD: ハード動作(勢いよく動作終了) OFF: サーボ制御信号OFF | |
| Step |
ステップ数 | |
|
|
Degree |
目標角度 |
|
| ||
| CDP2: Dimension Position Control for Two | ||
|
脚のピッチ軸サーボを二次元空間座標で制御する。 X−Z(横から見た座標)を指定することで、脚のピッチ軸サーボを制御する。 | ||
|
Command |
CDP2, LegID, BeginMovMode, EndMovMode, Step, X, Z | |
|
Parameter |
LegID |
脚 |
|
BeginMovMode |
サーボ動作開始モード | |
| EndMovMode | サーボ動作終了モード MSFT: ソフト動作(ゆっくり動作終了) MLNR: リニア動作 MHRD: ハード動作(勢いよく動作終了) OFF: サーボ制御信号OFF | |
| Step |
ステップ数 | |
| X | 高さ座標(ミリメータで指定) | |
|
|
Z |
奥行き座標(ミリメータで指定) |
|
| ||
| CPLS: Pulse Conrol of Servo | ||
|
サーボ制御信号をON/OFFする。 サーボ制御信号を一斉にON/OFF指定する。 | ||
|
Command |
CPLS, PlsFlag, PlsFlag, PlsFlag, ... | |
|
Parameter |
PlsFlag |
制御信号のON/OFF |
|
| ||
| CRIJ: Remote Interface Jump | ||
|
リモートI/Fの状態により指定レコードへジャンプする。 | ||
|
Command |
CRIJ, Stick00Pos, Stick01Pos, Stick02Pos, Stick03Pos, EQJumpRecord, NEJumpRecord | |
|
Parameter |
Stick00Pos | プロポスティック位置 PLOW: スティック下 PCNT: スティック中央 PHGH: スティック上 PIGN: 無視(評価の対象からはずす) |
| Stick01Pos |
プロポスティック位置 | |
| Stick02Pos | プロポスティック位置 * 内容についてはStick00Posと同様 | |
| Stick03Pos | プロポスティック位置 * 内容についてはStick00Posと同様 | |
| EQJumpRecord |
一致時Jump先Action Scirpt Record 0〜199 | |
|
|
NEJumpRecord | 不一致時Jump先Action Scirpt Ste
0〜199 255の場合は次レコードへ移動する。 * ジャンプ先として自分を指定した場合、1レコード後に再度コマンド評価を行う。 |
|
| ||
| CSEL: Set Execution Level | ||
|
実行レベルを設定する。 アクションスクリプト実行中に実行レベルを設定(変更)する命令で、任意のタイミングで実行レベルを変更したい場合に使用する。 例えば、動作中に、ある時間帯だけは新しいアクションスクリプトへの移行操作があっても、別のアクションスクリプトへ移行したくない場合に、一時的に実行レベルをあげるといった使い方をする。 | ||
|
Command |
CSEL, ExecLevel | |
|
Parameter |
ExecLevel |
実行レベル(0〜3)※モード移行はレベル2である。 |
|
| ||
| CPBJ: Push Button Jump | ||
|
プッシュボタンの状態によりにより指定レコードへジャンプする。 プッシュボタンの押下状態によってジャンプする命令である。押されていない場合と押されている場合のジャンプ先を指定することができる。 | ||
|
Command |
CSEL, ButtonNo, PSJumpRecord, NAJumpRecord | |
|
Parameter |
ButtonNo |
ボタン番号(0、1) |
| PSJumpRecord | 押されている時のJump先Action Scirpt Record ※値についてはCRIJを参照のこと。 | |
|
|
NAJumpRecord |
押されていない時のJump先Action Scirpt Record |
|
| ||
| CLED: LED Control | ||
|
LEDの点灯状態を制御する。 | ||
|
Command |
CLED, LEDNo, Flag | |
|
Parameter |
LEDNo |
LED番号(0、1) |
| Flag |
点灯状態 | |
|
| ||
| CJMP: Jump | ||
|
無条件にAction Script内の任意のレコードにジャンプする。 | ||
|
Command |
CJMP, ActionScriptRecord | |
|
Parameter |
ActionScriptRecord |
Action Scriptレコード番号 |
|
| ||
| CASJ: Action Script Jump | ||
|
無条件に別のAction Scriptにジャンプする。 | ||
|
Command |
CASJ, ActionScriptID | |
|
Parameter |
ActionScriptID |
Action Script ID |
|
| ||
ふぅぅ。
|
動画追加とサーボの補正ロジック |
今日の動画
この間の週末で撮ったやつは、これで最後です(あんまりいっぺんにアップするとサーバー負荷とか高いかな〜とか思ってバラしてます)。
G-Tune2004Fは、逆立ち+片手倒立も意識して設計しています。予選ではこけたけど、現在、サーボの再調整も済んでばっちりです。そもそも形が人間ぽくないんで、ちょっとわかりにくい?
逆立ち(888KByte)
いかがでしょ〜か?次回は、さらなる大技にチャレンジしていいきます(ほ、ほんとか?)。この写真を見ていて、右足と左足の位置が違うことに気づきました。まだどれかのサーボの調整が甘いか???う〜ん、どれだろう…。めんどくさいです。サーボ管理ロジックの改良を急がねば。
SAIPHA
SYSTEMのサーボ管理ロジック
とても単純です。メンテナンス目的以外では、角度で扱うので、これを変換するロジックとパラメータがサーボ毎に用意してあります。このパラメータは、0度として扱うサーボパルス値と、90度動作させるためのパルス幅の2つです。でも…サーボはもう少しバラバラしていることがわかりました。中立から前に行くときと、後ろに行くときと、動作幅で明らかにに異なっていたり(実は左肩サーボがそう)、きっとその中でも、さらにヨレヨレしているのではないかとおもうわけです。前は平行リンクのためか、全然気にならなかったのですが、今はかなり気になります。だからといって、お金も無いので、交換というわけにはいきません。
というわけで、改良しようと思っています。今度は、4点(実質5点)で取ろうと思っています。今度はデータの持ち方をちょっと変えまして…
- 1.5msecを0度として、±30度、±60度の点のパルス幅
- 1.5msec位置から何度ずらしたところを動作データの0度とするかのオフセット
という感じにしようと思います。他の持ち方も考えたのですが、データ量と変換計算のことを考えると、これがよさげです。というのも、所詮、H8/3664はRAMは2Kバイト。シリアルEEPROMから読み込んだ、これらの設定値は、後の計算で使うためにRAMに維持しなければならないです。いや、コード埋め込みでROMに書き込むという手が最も問題が無いのですが、志高く、オトコの浪漫です。本家SIPHA-COREは、サーボ変えたり動作データ変えたりプロポ変えたぐらいで、ソースコードいじっちゃいかんのです…「本家」があるということは「裏本家」がある?という話になりますが、実はちょっと考えています。使い道は…アレですよ。アレ。パチ・セブ…
PP板その後
ZIPPONさんから「まな板」との情報を頂きました。その後、いろいろネットで調べていた(材料屋.comさんで比較データとかでていました)のですが、意外にいいかも。ホビーロボットでの適正としてはABSの方がよさそうですが、結構いけるのかな?って感じです。「重い」と思いましたが、実はPP板の方がABSよりわずかに軽いようです。接着ができない(やりにくい?or強度がでない?)のが難点です。というわけで、コレで何か作ってみようと思います。なんといっても安いですし。他にもいいものが無いか探してみることにします。わが町にハンズはありませんが、ホームセンタークラスの「100円ショップ」があります。
WideStudioで「Hello」
現在、SIPHAのパソコン側は、Visual
Studioで作っています。でも、お金が大変なので、何かいいの無いかな〜って探していたら、「WideStudio」なるものを発見しました。す、すごい。これがフリー?とりあえず、「Hello」とやってみましたが、VBがC++な感じですね〜。他に使われている方いないのかな?まずはシリアル通信プログラムからですが、どうやってやったらいいんでしょう?もともとシリアル通信は、VCでもAPIでやってますので、同じようにやればいいんでしょうか?環境に慣れるのにちと時間要りそうですが(それはどのツールでも一緒)、今後、ちょっと使ってみて、いい感じでしたら報告したいと思います。
|
PP板、100円也。動画小物追加 |
100円ショップで、6mm厚のPP板なるもの発見
PP板ってな〜に?なんか、「まな板」みたいです。100円ショップで、結構でかい、6mm厚のものを発見して、ついつい買ってしまいました。ポリプロピレン?なんじゃそりゃ?あと、アクリル板も売っていますね〜。そういえば、ちょっと前にZIPPONさんのところで、ABS板の曲げ強度の話がありました。その中でABS+アクリルっていうのもあったんですが、あれってどうやって接着しているんでしょう?実はすごく質問したいんですが、Specialで忙しいといけないので、後で質問しようと思っています。
今日の動画
ようやくサムネイルができました(詳細はBBS参照してください)。ついでに昨日の分もサムネイルつけておきました。今日は、短い(アップしても参考にならないでしょうか?)動画をちょっとアップしてみます。
まずは、これができなくっちゃの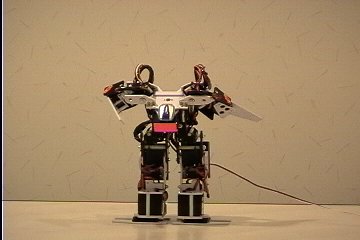
挨拶(139KByte)
意外に速いゾ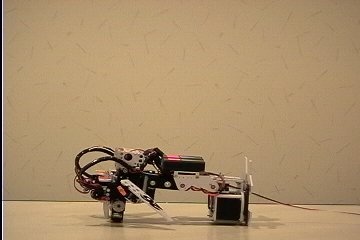
うつ伏せからの起き上がり(106KByte)
これがやりたかった〜の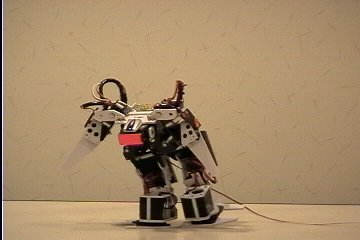
方向転換(204KByte)
横歩き、結構まともです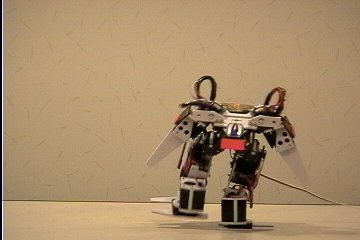
横歩き2歩(332KByte)
動画アップ、なかなかおもしろいですね〜。
ネットでのROBO-ONEに関するニュース
なぜでしょう?G-Tuneが紹介されているニュース、なぜか両方とも自分も映っています。あれとこれです。恥ずかしいです。しかも、変型シーンが紹介されている方は、あの恥ずかしい「スーパーなんちゃって飛行・なんちゃって効果音付き」です。あ〜、*T_T*です。バーニング宮田さんのように、低くてかっこいい声だったらいいのに。とほほ。
リトル・バニコアの話でSIPHA-COREを振り返る
バーニング宮田さんといえば・・・10万ヒット記念で、ジッタフリー(制御信号ブルブル無し)のリトル・バニコアを開発着手されるということで、H8/3664+IC4個とのこと。24chやろうと思うと、6個というアイデアしか出てこない自分がさみしいです。きっとロジックICで、うまく使えるのを発見しているのではないかと。今後の展開が楽しみです。
外部回路無しで18ch制御しているSIPHA-COREのサーボ制御信号ロジックですが、正直言うと、理論上、プルプルが、サーボの位置関係において若干発生します。ただし、現状つないでいるサーボでは、まったくぷるぷるしないレベルに仕上げています。そのあたりは、アップしている動画を見てもらえればわかると思います。ロジックは極めて一般的なもので、簡単に説明すると、タイマWを使って信号をONにして、GRAからDのコンペア割り込みで必要なタイミングでOFFにするようにしています。このため、GRA〜Dそれぞれが極めて近いタイミングで割り込みがかかると、サーボ制御信号OFFタイミングが少しずれます。
それが「理論上プルプルあり」なのです。ただ、C言語とはいえ、この制御信号OFFは極めて短時間で処理されるように、ピンアサインから工夫していますので、「事実上、無い(と思う)」なわけです。以前、SIPHA-COREのピンアサインをアップしましたが、サーボ制御信号は3つのポートに集めており、5本、5本、8本(4本+4本)という単位で扱えるようになっています。このあたりが安定化させるポイントです。
ただし、他にいろいろつないでいる(しかもダイレクトに^_^;)わけで、ピンアサインの関係上、安定して出力できるのは18ch、20chだと少し「プルプルするかも」って感じです。また、SIPHA-COREの場合、I2CのシリアルEEPROMをつないでいますので、これが若干ネックになっていて、外部にロジックICをつないでのタイマWのコンペア出力では、24ch化、ちと難しいかも。
というわけで、現在、新しいサーボ制御信号生成ロジックを研究中です。もちろん、この先も外部回路無しでシリアル通信、R/C受信機、加速度センサ、I2C-EEPROM、etc...(だってG-Tuneにスペースが無いんですもの)。SISOも引き続きH8/3664をしゃぶり尽くそうと思います〜!でもH8/3664の足の数が足りないような???こればっかしはしょうがないですネ!
|
本日は動画アップに初チャレンジ |
動画ってどうやってアップする?
ちょっと仕事が忙しくて、本日も出勤。でも、そんなことは全然関係なく、今日は動画にチャレンジしてみました。デジカメは30秒しか撮れないし、今、出張中だし。そんなわけで作戦タイム。う〜む。そうだ、両親がDVカメラ持っている。やっぱズームとかすごいんで、これを中心に考えることにして、とりあえずILINKカード(DV編集ソフト付き)を購入。\4980-。きっと、将来家族が増えたとき、CDとかDVDとか作るだろうから、先行投資ということで即OKでした。
まずはDVカメラで撮影。ここまでは普通です。んで、パソコンの方にとりあえずカードドライバいれてDV編集ソフトインストールして接続!最初、モードやらなんやら、よくわかんなかったんですが、ごちゃごちゃやっているうちになんか取り込めてしまった。後は、切抜きして・・・と。出力は、どうしたらいいのかな?と、他の方のホームページをチェックするとWMV形式が多そうなので、これにしてと(ひょっとしてMACの人とか見れないのかな?)。DV編集ソフトの方にも、WMV出力あったんですが、Windows Media Playerエンコーダなるものを動かして・・・と。
というわけでアップしてみました
こ、これでいいんですか?アップして普通にリンク貼ってみただけなんですけど・・・。もし、間違っていたらご指摘願います。あと、サムネイルっていうか、動画のコマをリンク元に使いたいんですが、どうしたらいいんだろう???(できるようになりました。2004/02/15)まあ、とりあえず、第1弾!
なかなか軽快に歩けていると思うんですが、いかがなもんでしょ?
続けて、話題の変型!ご要望があれば、飛行形態への変型もアップします。なんか固定アングルで撮るとイマイチですね・・・。もう少しアングルに捻りがほしいかな〜。まあ、カメラテクニックも、今後の課題ということで。
ふぅ。問題なければ、ぼちぼちっと他のもアップします。ではでは!
|
動作データを作るときはテスタで電源電圧チェック |
サーボが焼けると痛い。
うちでやっているサーボを焼かない秘訣ってのがありまして、それはロボットの電源にテスタつないで、常時、電源電圧をを常時監視しながら、動作データを作ることです。
理想的には電流計なんですが、しかしまあ、でっかい電流を測れるテスタなんて持ってなかったりするので、うちでは安いテスタで、電源電圧を監視しながらやっています。基本的にロボットを動かすときは、いつもニッカド、もしくはニッケル水素で、実際に実装した状態でやっていまして、安定化電源とかは使っていません。
まず、テスタをロボットの電源に接続します。んで、アイドル状態(楽な姿勢ですね)のときの電圧を覚えておいて、電圧計をつなげたまま動作させるわけです。そうすると、サーボに負荷がかかっているときは電源電圧がぐぐっと下がって、楽な姿勢になるとまた電圧が戻ります。どれくらい下がるとヤバイか?というのは、バッテリのパワーによっても違いますし、サーボによっても違いますので経験を積むしかないんですが、やっぱ、長時間電圧が下がっている=負荷がかかり続けているということでして、サーボを触ってみると熱くなっていたりします。こうやってチェックしてると、ほとんどサーボ焼き事故は防げます(サーボに慣れてくると、サーボから聞こえてくる音でなんとなくわかるようになりますけど)。よろしかったらお試しくださいな。
| ROBO-ONE Eagle、飛行形態で・・・なーんて |
ROBO-ONE
Eagleおもしろそう!
参加無理なんですが、ROBO-ONE
Eagleっておもしろそうですね〜。ああ、飛行形態でビューンと下ってみたい!!!(そりゃ無理か?あぁ、でもいずれ誰かがやるかもしれないですよね・・・) こう、背中にフックつけておいてですね、変形しながら着地!く〜、かっこいいカモ。アイデア的には・・・変型メカニズムをご存知でない方には説明が粗雑で申し訳ないんですが、両肩のロール軸パーツにフックのようなものをつけておくと、飛行形態のときは閉じた形になりますんで、それでパイプにぶら下がって、着地時にBIPEDにすると変形メカニズムの都合上フックが外れるって感じでできそうです。バランス的に難しいかな?脚のロール軸パーツあたりも良さげです。これはマジにカッコイイかもしんない。
もちろんこのパーツを作っていないっていうのもあるんですが、せめて会場まで、普通の電車で2時間ぐらいでいけるところだったら遊びに行くとか、飛行形態で下るためだけでもエントリーまじめに考えるんですが、新幹線にそうホイホイと乗るほどの財力もなし。う〜む。
リンクページ作成中
現在、リンクページ作成に着手しました。デザインに悩んでいます。森永さんみたいにクールにテキストですっきり並べさせていただくか、それともバナーとかできれい並べさせていただくか・・・。うーん、うーん、うーん。お話させていただいたり、お会いさせていただいたかたは、いれさせてもらっちゃおっかな〜って思っているんですが、よろしいですか???また寄らせていただきますね〜。
| 動作で一番難しかったこと・屈伸 |
屈伸はムツカシカッタ
「屈伸」って、結構難しいんですね〜。大会前のお話、まずは屈伸かな?なんて気軽に始めたんですが、これがなかなか。ヒザにサーボがついているロボットは初めて作ったんですが、ヒザのピッチ軸は、基本的に他のピッチ軸の倍速で動きます。これがまっすぐ下にいくだけなら簡単だったんですが、うちのG-Tune、イマイチ前後バランスが悪くって(設計イマイチ→変形優先とも関係なし)、斜めに屈伸しないと安定しません。
このあたりは経験が物を言うんでしょう。如何せん、経験が足りません。んで、どうなったかというと
「全開で前に転倒」
しました。最初は負荷でサーボ動作が遅れているだけだと思っていたんですが、ここは諸先輩方に従って、ムービーに撮ってパソコンでゆっくり再生(メディアプレーヤーの再生ボタンを連打しているだけ)してチェックしました。よ〜く見てたら、やっぱ上半身が前転方向に動くんです。よくよく考えると・・・
そうか、ヒザや足首の角度が変わると、上半身の位置が変わるんだ〜。
な〜んだ、そうだったのか。前は並行リンクだったから気づかなかったんだ(^_^;。フルに屈伸すると、ひざは180度近く動いて、その他のピッチ軸は90度近く動作します。まっすぐに屈伸するだけなら簡単そうですけど、斜めに屈伸しようとすると、負荷によるサーボ動作遅れも伴って、すごい勢いでひっくり返るようです。また、屈伸動作後のブレ防止に、サーボ回転に対して変化速度制御(なめらか〜に停止とか)やっても、実際には物理的な角度位置によって効果が変わってしまい、およそ想像できる範囲では無さそう・・・。やっぱ経験値でしょうか。サーボパワーを補うパワーが私には無いです。ゆっくり動かせばいいんですが、今度は自分が納得できません。ああ、こうやってハマっていくのね。
しかし、こんなときのために「XZ座標軌道計算プログラム」がSIPHA COREに組み込まれているのだ。とはいえ、いろいろ制約が多かったので、これを解消すべく改良、改良。角度指示動作した後でも、即座にXZ座標軌道計算に入れるようにしました(要はXZ座標→角度だけだったのを、角度→XZ座標も組み込んだ)。
うぅ、でも精度が悪くて結果がひどかったです。所詮、角度制御の補助に使用していただけのことはある。やっぱ、1度、1mmでは、片方向の計算は良くても、計算結果からまた戻すような使い方には耐えられません。ええい、精度アップ改造!です。以前、XZ座標系からサーボ角度を求めるルーチンの精度アップの話をしましたが、今回は気合が違います。根本的にアップです。小数点以下2桁まで計算できるようにしました(精度そのものは、三角関数テーブルの関係で、実質1桁アップです・・・アンバランスにプログラムしてしまった気が・・・)。これでどうだぁ〜、いいぞ、エミュレータではOKだ!ふう。精度あがったあがった。これに加減速ルーチンをつければバッチリ!XZ座標系動作で加減速してくれるので、実際の物理的な重心の移動と一致するので、機体安定性もぐぐっとアップ!
これで、スクリプトには4行(両足分なので)書けば、屈伸です。複雑な角度計算はH8/3664におまかせ〜。偉いぞH8/3664(こんな計算やらせても、まだ余裕あります)!そんなわけで、無事、深〜い屈伸ができた次第です。
マジメな話、この屈伸の苦労に比べれば、歩行、本昇降、逆立ちは全然手間かけていません。
「たかが屈伸、されど屈伸」
です。きれいに素早く深い屈伸ができたとき、きっとそれは機体のバランスやクセをつかんだ時ではないでしょうか?(と、書きながら、自分のはまだまだだなぁと思っていたりします)
| G-Tune 2004Fの御代 |
半期決済
てぃろりろりん。半期決済?の時期がやってまいりました。安いロボットをコンセプトに上げている以上、これを報告しないわけにはいきません。うぅ。
それでは、G-Tune 2004Fの製作費です。主要部品の購入金額を計算してみました。部品によっては購入したものの半分しか使っていないとかありますし、あんまり細かいのまではチェックしきれていませんが、大雑把には以下のようなかんじです。
| アイテム | コメント | 購入価格 |
| サーボ | GWS MICRO MG (\3600*11個) | \39,600- |
| サーボ | GWS S03T(\1800*7個) | \12,600- |
| ABS板 | 2mm、3mm | 約\2,500- |
| ネジ、スペーサ | いろいろなサイズのもの | 約\2,000-(今回、だいぶ減らしました) |
| マイコン | AKI H8/3664 | \1,600- |
| 電子部品 | EEPROM、加速度センサ、線材、その他/TD> | 約\5,000- |
| NiMH | GP単3-2000mAH(180*12) | 約\2,160- |
| 充電器 | Nexcell単4単3兼用 | \2,980- |
| プロポ | フタバ T4VF | \4,000- |
| レシーバ | GWS GWR-4P | \3,600- |
| クリスタル | フタバ用(\1750*3) | \5,250- |
| その他 | 接着剤、インシュロック、ベアリング等 | \2,000ぐらい? |
ま〜、だいたい予選時に公表した通り、8万3千円ぐらいです。ということは消費税をいれるともちょっとアップです。ゴメンなさい。前回からぐぐ〜んとサーボ数を増やして(12→18)このお値段!パフォーマンス−コスト比ぐぐっとアップと思うのですが、皆様の目にはどううつりましたでしょうか?怖いので、それは聞かないことにして(笑)。パフォーマンスの方は、そのうち連続写真とか、できれば動画とかアップしてみようと思います。
今回、このサーボに出会えたのがラッキーでした(浅草ギ研さん、ありがと〜)。価格自体は上がっていますが、パフォーマンスもかなりあがりました。あと、AKI-H8/3664ですべての制御ができるようになったのが大きいです。\12800→\1600+\400にダウンです。Best Technologyさん、ごめんなさい。あの時言えませんでしたが、私のはAKIです(サイズの問題でして・・・)。でもTINYを精一杯使っているという点では、共通点があうあうあう。
S03Tは、ギアがやわいですが、ショックみたいな形で力を与えなければ、そう問題にはなりませんでした。G-Tuneの場合、ロール軸に使っていますので、転倒時も腕等にガードされてショックが直接入ることはなく、トラブルはありませんでした(おっかなびっくりで使っているところもあります)。MICRO MGはなかなか丈夫です。モータはHPX-BBと同じらしいですが、ギア比も異なってメタルギアなので、いまのところノントラブルです。またケースもなかなか丈夫です(S03Tはやわいです)。 後日解説しますが、G-Tuneは、サーボ裏がわに、直接ビスを通して両持ちを実現していますので、ケースの強度は重要です。S03Tについては、ケース内に余裕がありますので、ABS板で補強しています。
そんなわけでまだまだがんばる「お父さんのお小遣いで作れるロボットコンセプト」のSISO JUNK STUDIOでございます。
| 第5回ROBO-ONE私的感想(長文失礼) |
 いや〜、みなさま、本当にお疲れ様でした。スタッフの皆様、いろいろありがとうございました。きっと全般的なことは、いろいろな方が書いてくださっていると思いますので、非常にプライベートな感じで書きたいと思います。今回、ほんと心に余裕が無くてごめんなさい。もっといろいろな方とお話したかったです。次回は、もっとゆとりあるスケジュールでいけるように工夫していきたいと思います。
いや〜、みなさま、本当にお疲れ様でした。スタッフの皆様、いろいろありがとうございました。きっと全般的なことは、いろいろな方が書いてくださっていると思いますので、非常にプライベートな感じで書きたいと思います。今回、ほんと心に余裕が無くてごめんなさい。もっといろいろな方とお話したかったです。次回は、もっとゆとりあるスケジュールでいけるように工夫していきたいと思います。
ちなみに、月曜日からすぐに出張していまして、現在も出先です。ほんと、出張はスケジュール泣かせでかないません。とほほ。
これ、すごく長文です。もし途中であきてしまいましたらすいません。なんか書きたいことがたくさんありまして・・・。また、お会いできた人の名前、なるべく書くようにしていますが、もし、間違い、ご指摘などありましたら連絡願います。
ROBO-ONE予選
■会場入りと事前審査
事前審査用動作と基本動作ができたところで、そのまま新幹線で品川まで出てゆりかもめで会場へいきました。ゆりかもめの券売機で、なかなか千円が入らない。ぶつぶつ。今回、席が決まっており、初日は2チームで1つでした。1チームあたり2人分ぐらいは欲しいな〜と思いつつ、座席指定方式はいいと思います。お隣は、普通の会社員さん♪です。何人かの方と挨拶をした後、作業時間確保のため速攻で事前審査パスしに行きました。足裏も、忘れずに側面を含めて計測をお願いし、サイズは問題なくクリア。動作も、秒速2歩!泣くほど深く屈伸、軽快とはいえないけど、ジタバタしながら横移動!というわけで、一発クリアです。
■いろんな方々とお会いできました
前大会で会ったことある方、ネットでしか知らなかった方、自分のホームページを見ていてくださる方、いろいろな方と、少しずつですが話をすることができました。あの時は、心に余裕が無くてごめんなさいです。次回は、今回のプロジェクト管理の反省から、もっと余裕を持って、お祭り騒ぎできるぐらいの感じでいけるようにしたいと思います。そして、かづひさんにお土産もらいました。うれし〜。そして、す、すごいです、ウィアード72。めちゃくちゃいけてる!本当にぺらぺらで、サーボのミミ切って、並べたような感じです。最初、ロボットには見えなくて、何かと思ってしまいました。マイコンもすごいです。カットされたAKI-H8/3664は、まるでオリジナルマイコンです。自分も欲しい!と思いました。というわけで、パチモンで申し訳ないんですが、これから設計します。ウィアード72を越える小型サイズで、内ポケット、それが無理なら大き目の外ポケットに入るのを目標にします。そんなわけで、パチモンといいつつ、SISO
JUNK STUDIOアレンジしようと思います。うちにGWS
PARK-HPXと単4のニッケル水素がありますので、これで作ろうと思います(す、すまんG-Tune2003A)。
■調整中の大きなミス。しかも超初歩的な・・・
その後、デモ用動作調整したり人に見せたり新しい動作データ作り込んだりと、自分の順番までを忙しく過ごしていたのですが、おーまいがぁ!机から落下させるというめちゃんこイージーなミスをしてしまったのです。見ていた方、近辺にいらっしゃった方、自分と話をしていた方、本当にすいません。自分のミスで一緒にブルーにさせてしまったかもしれません。あれは、あくまでも自分のミスで、楽しい時間を暗転させてしまったことを、非常に申し訳ないと思っています。この場を借りて謝罪させていただきます。
■りかば〜、妥協はあってもあきらめはない!
その後、何気に動作するのですが、左側のサーボが指示どおりに動かないことがわかりました。自分のデモまでは、もう15分を切っていたので、ご迷惑とは思いつつ、スタッフの方にお願いして順番を変えてもらうことにしました。スタッフの皆様、ご配慮、ありがとうございました。さて、修理の方ですが、恐らくポテンショと軸のところが落下のショックでズレた、またはガタができたと判断して、サーボ交換を決行しました。どんどんバラしていく自分の横で、妻が細かな部品を回収して整理。う〜ん、なかなか効率よいです。
ちなみにダメージはサーボと時間だけでした(笑)。G-Tuneってすごいですね〜。ROBO-ONEということで、丈夫に設計したつもりでしたので、これで立証されました。自分の設計コンセプトは正しいようです。ボディに破損はなく、またあたりまえのようにゆがみも無く。う〜む、さすがABS。ゆがんでも戻ります。今後、フレームにアルミを採用することがあっても、外側はABSにしよう。
ところが、さらにおかしくなっているサーボを発見。手持ちが2つしかなかったので困ってたずねると、普通の会社員さんがご自身のロボのをはずしてくれるとの申し入れをしてくださったのですが、あまりにも申し訳ないので、浅草ギ研さんも近くにいることを思い出してヘルプのお願いにいったところ、中古サーボを1つ頂いてしまいました。どうもありがとうございます!物理的にも助かりましたが、普通の会社員さんの申し入れ、浅草ギ研さんの差し入れ、心理的にもすごいチャージアップしました。んで、SIPHA COREにはサーボ毎のクセを補正する仕掛けがあるので、このデータ取りを始めるのですが、これがなかなか決まらない。静かなところで、落ち着いてやらないとダメですね〜。次回は、計測方法そのものを改良して、いつでもどこでもにしたいと思っています。
でもね、でもね・・・本当は、投げ出したかったんですよ。ここだけの話で秘密です。
■皆様のデモンストレーション
修理している間、時々ちらっとは見ていたんですが、す、すごいですね〜。くらくらします。G-Tune、いちおう、これでも皆さんのロボットをおっかけているつもりなんですが、まだまだです。もっと滑らかに動かさないとダメだな〜。G-Tune、倒立〜一点倒立と、今回いきましたが、次は滑らかな側転や倒立を目指そう。高速歩行もチャレンジしないと。前回、あのロボットを生で見て泣くほど感激してから、パフォーマンス面で、少しでも近づけたら・・・と思ってがんばっているSISOです。密かにファン。うちのはヨチヨチで足元にも及んでいませんが、がんばって追いかけさせていただきます。
■自分のデモンストレーション
う〜ん、やっぱ本調子ではないです。サーボの補正値がイマイチ。でも、時間的にも終わりの方でしたので、そこそこあたりがついたところで予選に挑みました。冒頭でちょっと事情を説明させていただきまして、自分のテンションあげてのスタート。変形はばっちり決まりました。そしてロボコンマガジン昇降。これも問題なくクリア。そして、2点倒立。これもクリア。次の1点倒立は失敗。サーボ調整の甘さがでました。しょうがないので、手で起こしたら自律したので、そのまま続行。そして歩行。左足首の調整が甘く、手で後ろからちょっとつっついての歩行でなんとか。そんなわけで本調子ではないものの、拍手もいただけたし、よかったよかった。
■な、なんと???
予選、29位で通過しました。う〜ん、本調子じゃなかったのに、なぜだろう?変形が受けたのか、倒立が良かったのか?まあよい。というわけで、会場での余り時間を使ってリモートプログラムのデバッグをしようと思っていた作戦は既に倒れていたので、急いでホテルにチェックインしてさっそくプログラムのデバッグと動作データの作成に入りました。ちなみに止まったホテルは、有明ワシントンホテルです。セミダブル2人使用で、税込み14000円。朝食有り、ゆりかもめの一日乗車券つき!すご〜い。結構、得した気分。夜景サイコー!
■というわけでデバッグデバッグ
デバッグ〜動作データ作成をひたすら繰り返す。ああ、今何時だろう?なんて思いながら。そうこうしているうちに、動作パターンによって、どうもサーボ制御信号が消える不具合に遭遇!あらら。朝方までがんばってみるものの発見できず。気分転換に、ヘビーな対戦相手用の動作データとか、脚が速くて押されそうな対戦相手用の動作データを作ってみるけど、やっぱりバグわからず・・・。
ROBO-ONE決勝
■決勝トーナメント前
朝、到着して、ラジコンの予備クリスタルを持っていないことに気づく。しかも受付に行ってみると、バッティング。バッティング相手の坂本さんにお願いに行くと、クリスタルを貸してくださるとの事で、またこれがバッティングも無くばっちり!どうもありがとうございました。んで、とにかく別室(電波出していいところ)でデバッグデバッグ。やっぱりわかんない。あせるけど、操作方法と動作の組み合わせで、ある程度回避できることがわかってきました。というわけで、追加動作の作成と操作の練習しました。隣でも同じように動かしている方が・・・。後でわかったのですが、チャーリーさんでした。あの時、横でうなっていたのは私です。
■本戦トーナメントAdamant Victoria
う〜む、でかい。Adamant
VictoriaはG-Tuneの倍ぐらいある。きっと重さは4倍か?よりによって・・・と思ったのがいけなかったのか、練習した特別操作方法、すっかり忘れてしまいました。スタッフのみなさま、観客のみなさま、選手のみなさま、対戦相手の滝沢さま、ごめんなさい。舞い上がってしまいました。あそこで何をしようとしたかというと・・・対ヘビークラス用必殺技「スーパーサイドアタックねじ込みつき」を繰り出すため、方向転換をしたんです。そしたら操作ミス(特別操作方法を忘れた)で転んでしまいまして後はどんどん心がドツボに・・・。自爆でした。ああ、情けないです。
それにしても、あのリング下のクッション、すごく気持ちがいいです。スタッフの方々の気遣いが感じられます。なんといっても、ロボットが落下しても跳ねません。ふにょんっと落ちます。個人的には、エスケープゾーンの方がいいかな?と思ういつつも、リングを上げて見やすくして、かつ、あのふにょんとしたクッション。なかなかいいですね〜。
■1回戦が終わった直後
いや〜、落ち込む時間なんていっさい無しでリラックスリラックス。友達家族が応援に来てくれていたので、用意していただいたお弁当は食べずにみんなで7Fで食事。なかなかおいしかったです。ちなみに、お弁当も結構おいしいです。いろいろありましたが、今、自分の状態でできることを、精一杯やったという充実感が、みょ〜にありまして、ご飯もおいしかったです。結果的に、事実だけを追えばいろいろなんですが、なぜでしょう?すごく気分がよかったです。やっぱ、人それぞれ、使える時間とかお金とか決まってますよね。そういう枠の中では悔いなくできなと思うからかな〜って思います。ロボットやってると、ほんといろいろありますから、少々のことでは微塵のへこみも無かったりします(笑)。
■その後(ソフトウェア編)
妻は友達家族とASIMOを見に行き、自分は会場でいろいろとお話。皆様のおかげで、大変、有意義な時間を過ごすことができました。
今回も吉野さん、お会いすることができまして、吉野さん、かづひさんと制御プログラムで盛り上がりました。自分は元ソフト屋(気持ちは今でもソフト屋。でも仕事はSE。うるうる。)、やっぱ楽しいですね〜。かづひさんのサーボ制御信号生成ルーチン見せてもらいました。すごいですね〜。レジスタを使ってないので割り込みの退避がいらない。しかもRAMで動作させているので、外部から値を書き換えるという荒業。やります。吉野さんからも、サーボ制御の隙間を縫ってセンサーなどの信号取り込みをするという、貴重なお話を頂きました。私目もいろいろ話させていただきました。なんてったって、H8/3664+I2CEEPROMだけで18サーボ制御+R/C受信機リアルタイム取り込み+加速度センサリアルタイム取り込みでなかなか頑張っていますので、このあたりはしっかりお話させていただいちゃいました。
サーボ制御信号ですが、私の場合、4ch分を最初にオンして、順次オフしていきます。それを5回繰り返すんですが、今回の話の中で、順次オンしていって一度にオフするという手があることを知りました(かづひさんの場合、もうちょっと複雑ですが)。なるほど〜。なんとなくいいことがありそうなので、ちょっと検討してみたいと思います。
そこへ、ほりさんとあるば〜とさんもみえて、いろいろお話できましたです。今、思い出すと、ほとんど一方的だったような気がして・・・すいません。後は、動作スクリプトの書き方(一般的にはモーションデータの作成ってやつですね)の話とかさせていただいてました。SIPHA COREでは、一応、スクリプト言語が存在して、それを端末側でバイナリ化してシリアルEEPROMに書き込むようにしていますので、そのあたりをメインに。これから作られる方の参考(悪い例かもしれませんが)なるかもしれないので、こちらの方は、またホームページの方で公開します。
■その後(メカデザイン編)
さらに、メカデザインでKenjiさんと盛り上がりました。やっぱ、変形、逆間接つながりです。あの方のロボット、格納体型がかっちりとれて、そのときの形がまたロボットからかけ離れていていいです。また、脚とかのデザインがよくできていて、きれいに納まるようになっています。前からな〜んであんなに股間がひろいのかなぁって思っていたんですが、アレは上半身だそうです。こっそり次のアイデアを見せていただきました。イケてます。秘密です。自分はもうネタを出してしまったので、次はどうするか悩んでいますが、次はオプションパーツ対応にしよっかな〜。「Armored
G-Tune」とか、ブースター付きの「Super G-Tune」なんでどうでしょう?あとはDr-GIYさんとウィング合体の話・・・(笑)。ま〜、たわいない冗談話にしても、G-Tuneのウィングをもう少し大きくできないか検討してみよう。
これからどうしようかな?
■今回のエントリーで勉強になったこと
今回の一連で勉強したのは「ROBO-ONEの難しさ」について。ロボット作成っていうのは、慣れるに従って時間は短縮されていきますが、それでもやっぱ時間がかかります。いろいろやりたいことってあるんですけど、使える時間というのは限られているわけでして、この中で自分が何をするか?を選択(妥協ともいいますが)していくのが重要だと思います。私の場合、使える時間がかなり仕事に左右されるので、次回へ向けては、余裕のあるスケジュールを組みたいと思ってます。また、ステップバイステップ方式で、目標を細かく設定し、また、目標は多少の無駄覚悟でそれぞれ完成したものとして、それを短期サイクルでまわすことで機体の完成度を上げていこうと思います。まずは、動くもの、次にそれを改良したもの、次はさらにそれを改良したもの、というのを半年の中で行い、間に合わなければロールバックって感じで。趣味でやっているが故、こういう方式のほうがよさそうです。
■G-Tune
2004F
大方は狙った通りにできた、なかなかいいハードだと思います。変形機構もうまくいきましたし。MICRO
MG、S03Tもなかなかよかったので、次回もこの機体で行こうと思います。ただ、設計まずったな〜とか、こうした方がよかったな〜っていうのはあるので、改良していきますけど。かかと側の足裏剛性が全然足りないのと、重量の前後配分がイマイチなので、まずはそこから手をつけようと思います。また、新しく安くて良い部品を発見したら、どんどん試して紹介したいと思います。
ソフトの方は、SIPHA SYSTEMのバグ取りと、センサの適用、それに、もう少し汎用化できるように改良を続けたいです。できれば人に見てもらえるものになるといいなぁと思っています。実際、まだまだ人に見せれるようなものではありません。また、今回の大会でいろいろ情報が得られましたので、デバイス管理部分(サーボ制御信号処理とセンサ取り込みのあたり)のアーキテクチャを見直したいなぁ。もっとソフトに余裕を持たせることができれば、もっといろいろできるということですから。
というわけで、これからの半年は機体改良、ソフトウェア改良、そして新デバイスのテストをメインに、いろいろやって行きたいと思います。さて、どうやって飛行機能を実装しましょう???西村殿曰く「ロケット、結構安いよ」・・・(^_^; やっぱやめておきます。おもちゃでいいです(笑)。
■キープコンセプトしたいんだけれど・・・
10万円で作れるロボットというコンセプトでやっているSISO
JUNK
STUDIOですが、難しい問題が発生しています。それは、次回は正式採用されるであろう、無線の8ch化です。ラジコンシステムを採用しているため、クリスタルの購入費だけで、あらら〜になってしまいます。現在で8万3千円。これにクリスタルをさらに5ch追加すると、それだけで結構いっぱいいっぱい。というわけで、次回の計算方法、バッテリは1セット分だけとか、クリスタルは1ch分だけっていうのはOKでしょうか?(ちょっと看板に偽りアリ?)それとも、何か良い無線モジュールが安く発売されることを期待しようかな。半年ありますから、いろいろ期待してみましょう。
やっぱ、コンセプトとして「お父さんのお小遣いでできるロボット」っていうことで、10万円はキープしたいんですよね〜。実際のところ、足かせに感じることもあります。例えば、次にまた5万つぎ込んでトータル15万円のマシンっていうのも、現実的にはあるわけですけど、やっぱ、特に新しく始められる方に参考にしていただきたいということで、常に総制作費10万円ぐらいにトライしたいし続けたいって思っています(そのうちこっそり12万円とかになったらゴメンなさい)。
最後に・・・
他にもいろんな方とお話しさせていただいたり、お声がけいただきまして、どうもありがとうございました。
吉村さん、 滝沢さん、 宇宙ロボワンファイターXさん、 やまぐちさん、 なかぷさん、 夢さん、 ZIPPONさん、 人形つかいさん、 とみやまさん、 柴田さん、
九大の???さん、 森永さん、 宮田さん、
たぶんまつしろさん?(お話した順のつもり)・・・
頭がオーバーフローです。覚えきれなかったです。すいません。でも、機会あればまたお話したいですね!次回はもっと余裕を持っていきますので、今後ともよろしくです!
| ねっむ〜いです、帰ってきました。 |
あ〜、眠い、眠いです。いろいろ楽しいこと、悲しいこと、報告したいのですが、この3日、ほとんど眠ることができずで、しかもあしたからまた出張ですので、詳しい話は少し落ち着いてからにします。
試合の方は、G-Tune、事前審査は楽勝だったものの、29位でなんとか予選通過、決勝トーナメントでは第一試合で自爆、というわけで、ベスト32、ということになりました。
後日詳しい話のなかで書きますが、自分の不注意で、調整中のテーブルからの落下事故の時に立ち会われてしまったみなさま、ご心配等いろいろかけましてすいませんでした。復活に向けて力を貸していただいた浅草ギ研さん、ありがとうございました。疲労、緊張、超ブルーの中、横で精一杯サポートしてくれた妻、ありがとう。みなさまの気配り、応援のおかげでチャージアップ!して最大パワーでやりつづけれたと思います。
ここですごく書きたいことがあります。今、自分は
「すごくすがすがしい気持ち」
です。
また、今回、変形、二点倒立、一点倒立と行きましたが、今度はさらに、あ〜んなこと、こ〜んなこともしてみたいって感じで、とにかく、G-Tune 2004Fを100%の状態にしたくてしょうがないですね〜。
「なんだかんだ言って、今回も非常に(前回以上に)
気持ちよくROBO-ONE会場を後にした」
わけであります。あはは。あ〜、おもしろかった。ぜひ、次回もみなさま、お会いしましょう。また、今回、お話できなかったみなさま、会えなかったみなさまも、今後ともよろしく〜です!