|
TM��.tmk�t�@�C�� |
.tmk�߂Ă�����
����Amot�t�@�C���̍쐬�A�������݂ɖ������������킯�ł����ATM�Ńv���W�F�N�g������Ǝ����I�ɂł���u.tmk�v�Ƃ����t�@�C���A�悭���߂Ă�����A������umakefile�v�̂悤�ł��B�悭�݂���A�ut�v�́umk�v�c���O�ŋC�Â��Ȃ����`�ƌ����Ă��܂������ł����A���܂�ڂ����Ȃ���Łc�͂��B
�Ƃ����킯�ŁA����Amot�t�@�C���̂��߂ɒlj������u$(LMC) $(LMCFLAGS) $(OUTDIR)\$(ABSFILE)�v�ł����A.tmk�t�@�C���̏�̂ق��ɁA$(LMC)�̒�`�������Ă���܂����B�uLMC30�v�Ƃ����v���O�����ł��B�r���h����ƁA
�uLMC30 -L �o�̓f�B���N�g��\�قɂ���.x30�v
�Ƃ����R�}���h���C���Ƃ��Ď��s�����Ǝv���܂��B�����Ă͖����ł����ǁA�R�}���h���C���h�̕��́A�悩�����炨�������������B
�Ƃ���ŁATWO LEGS����̂Ƃ���ŁA�uOAKS16-MINI�ŗV�ԁv�Ƃ����R���e���c���lj�����Ă��܂��I�������B�I�[�N�X�d�q�Ńe�N�j�J���j���[�X�������ł��ˁI�����`�F�b�N���Ă݂悤�B����Ɂc�l�R�̊炪�ۂ��Ȃ��Ă��܂��B���H���H������ۂ��Ȃ��Ă܂����H�H�H�i�O�̂��̂Ă������c�j
ROBO-ONE DVD
ROBO-ONE
DVD�͂��܂��āA�������Ă��܂��B�O���e����A���肪�Ƃ��������܂��`�B����`�A�������܂��B�����l�^�Ƃ��Ă��ō��ł��B���낢��킩��܂��ˁ`�B�������AJ-Class�̓��T�f�����uG-Tune�ό`�v�B���ꂵ�`�B�܂��A�S���ς��犴�z�Ƃ��A�b�v�����Ⴈ�����ƁB
���́AJ-Class���ςĂ��܂����A�����̃P�[�u���ő��������|���ē]��ł���Ǝv���郍�{�b�g���������肵�āA�ǂ����ȁ`���Ďv�����Ƃ������B�P�[�u�������܂�C���̂Ƃ��́A���t���[���~�߂ĉ������Ă����Ƃ������ق����A�i���Ƃ��Ă͖ʔ����Ǝv���܂��B���x�AROBO-ONE�ψ���Ƀ��[�����Ă݂悤�B
|
OAKS16-MINI�Ńt���b�V��ROM�������� |
�t���b�V��ROM�������݃e�X�g����
����A�f�o�b�K�o�R�ł̃v���O�������s���ł��܂����̂ŁA�����́A������āAROM�����Ƀ`�������W���܂����BTM���g���āA�u�v���W�F�N�g�̐V�K�쐬�v����uFlash
Starter�ŏ������݁v�܂ł��܂����̂ŁA�ȒP�Ƀ��|�[�g���܂��B
�O��Ƃ��ẮAOAKS16-MINI�t���́A�uMan_miniFullKit.pdf�v�ɏ]���Ĉ�ʂ�̍�Ƃ��I����Ă�����̂Ƃ��܂��B�܂��A���ۂɎ��s�����v���O�����ł����A�T���v���ɂ������umini1.c�v���C�����Ďg���Ă��܂��B
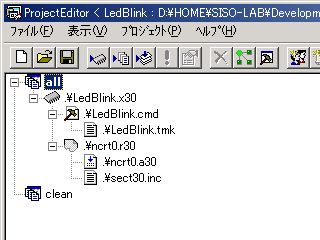
���v���W�F�N�g�̐V�K�쐬�ƃf�o�b�K�Ŏ��s
TM���C���X�g�[������ƁA�uTM���[�U�[�Y�}�j���A���v�Ƃ����̂��ꏏ�Ƀ��j���[�o�^����܂��̂ŁA�u�N�C�b�N�c�A�[�v�i�܂��낳�����j��ǂ݂Ȃ���A�V�����v���W�F�N�g�����܂��B�u�A�C�e���̕ҏW�v�|�u�A�C�e���̒lj��v�ɂă\�[�X�t�@�C����lj����܂��B���̏ꍇ�A���ꂩ����t�@�C�����ł��\���܂���B
 �@
�@
���ɁA�uMan_miniFullKit.pdf�v��7.1.2.��ǂނƁA�uSTARTUP�t�@�C����CD����R�s�[���ĉ]�X�v�Ƃ���̂ŁA�悭�킩��Ȃ��̂ł���CD����R�s�[���܂��BKD30���g��Ȃ��ꍇ�͕s�v��������܂���B
�����ăv���O�����������܂��B����́A�y�����Ƃ������ƂŁAmini1.c���Asfr26.h�ɂ��킹�ď������������̂��g���܂����B����sfr26.h�Ƃ����w�b�_�t�@�C���AM16C/26�̃��W�X�^��`������`����Ă���w�b�_�[�t�@�C���ł��BH8/3664�Ƃ�����Ă�����ł��ƁA�u3664.h�v�Ƃ������Ƃ킩��₷���ł��傤���H
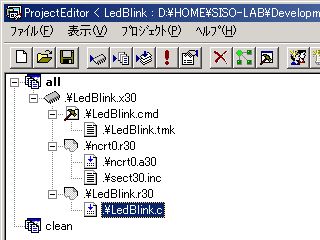
���NjL�F�ȉ��̃\�[�X�R�[�h�ł����A���"sfr26.h"���������Ă�����Ap7_addr.byte��p7�ցApd7_addr.byte��pd7��#define����Ă��܂����B����āAmain()���̒��́A���ɏC���͕s�v�ł��邱�ƂɋC�Â��Ă��܂��܂����B
//--------------------------------------------------------------------------------------
// �t�@�C�����F LedBlink.c
// ���e�F LED�_���iLED2,3�����݂ɓ_���@�\�t�g�E�G�C�g�j
// OAKS16KIT��mini1.c����{�Ƃ��āAsfr26.h���g�p����悤�ɕύX
//--------------------------------------------------------------------------------------
// �C���N���[�h�t�@�C��
#include "sfr26.h"
// �v���g�^�C�v�錾
void _main(void);
// �}�N����`
#define LED2_on 0xdf // LED2(p75)�_��
#define LED3_on 0xef // LED3(p74)�_��
#define LED_off 0xff // LED����
main(){
unsigned long i;
p7_addr.byte = LED_off; // �|�[�g7�o��H(LED�����j
pd7_addr.byte = 0xff; // �|�[�g7�����o��
for(;;)
{
p7_addr.byte = LED2_on; // LED2�_��
for(i=0x4ffff;;){ // ���ԑ҂�(�\�t�g�E�G�C�g�j
i--;
if(i==0) break;
}
p7_addr.byte = LED3_on; // LED3�_��
for(i=0x4ffff;;){ // ���ԑ҂��i�\�t�g�E�G�C�g�j
i--;
if(i==0) break;
}
}
}
��̓r���h���āA�Ƃ肠�����f�o�b�K�iKD30�j�Ńe�X�g���Ă݂܂��傤�BLED��mini1.c�Ɠ����悤�Ƀ`�J�`�J�_�ł���͂��ł��B
��TM��MOT�t�@�C���쐬�̐ݒ��lj�
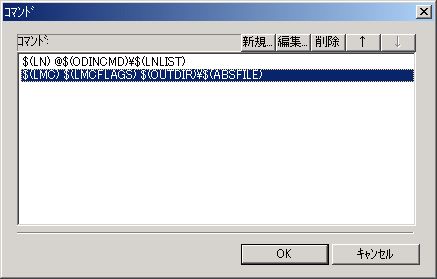
���āA�ǂ������MOT�t�@�C�����쐬���邩�Ƃ����ƁA�uMan_miniFullKit.pdf�v�́u6.3.8.�v���W�F�N�g�G�f�B�^�T�v�v���悭�ǂނƁA���A�C�e�����r���[���̐����̂Ƃ���ɁA�u�Dflashstart�i�t���b�V��ROM�ɏ������ނ��߂̃\�t�g�j�Ŏg�p���郂�g���[�����t�H�[�}�b�g�̃t�@�C�����쐬���邽�߂̃R�}���h�ł��B�v�Ƃ�������������܂��B��������āu���ށA�����Ƃ����lj���������ɈႢ�Ȃ��v�Ǝv���Ēlj����Ă݂܂����B
�A�C�e���̕ҏW�v�|�u�R�}���h�v��I������ƁA���̃E�B���h�E���\������܂��B����ɂ́A�r���h�̍Ō�Ɏ��s�����R�}���h���L�q����Ă��܂��B
�u�V�K�v�{�^���������āA�����ɁA�u$(LMC) $(LMCFLAGS) $(OUTDIR)\$(ABSFILE)�v��lj����܂��B
����Ńr���h����ƁA�g���q���umot�v�̃t�@�C�����ł�������܂��B������uFlash Starter�v�ŏ������߂�OK�ł��B
��SAKURA�G�f�B�^
���́A���SAKURA�G�f�B�^���g���Ă���̂ł����A�����TM�ɓo�^����ꍇ�A�s�ԍ��̎w��������ƕ֗��ł��B�r���h�ŃG���[���o���ꍇ�A�r���h�̃E�B���h�E����_�u���N���b�N���ăW�����v����ƁA�\�[�X�t�@�C�����J���āA�Y���s�܂ŃW�����v���Ă���܂��̂ŁA�Ȃ��Ȃ��֗��ł��BTM�́u�I�v�V�����v�ŁA�uEDIT
TOOL�v�ɃG�f�B�^��o�^���A���̎��ɁAParameter�Ɂu%F -Y=%L�v���w�肵�܂��傤�B
���Ō��
�Ō�ɁA�܂��f�o�b�K���g���\�肪����̂ł�����A���j�^�v���O�������������݂܂��傤�BCD-ROM�́u\oaks_mini\Monitor�v�ɂ���܂��B�����Flash
Starter�ŏ������߂�OK�ł��B
|
OAKS16-MINI��Full Kit�g�ݗ��Ă܂����B |
���Ԃ��������ĐS�����������Ȃ��c
�悤�₭�g�ݗ��Ă܂����B����ρA�T�����[�}���A�ǂ����Ă���Ƃ͏T���ɂȂ��Ă��܂��܂��BSIPHA CORE�Ƃ��Ɣ�ׂ�Ƃ��̂��������W�x���Ⴂ�̂ŁA�ǂ����S�����������܂���B�����ƁA����R�A�ŃT�C�Y�ɂ�������Ă�����݂͂�ȓ������ƁB
�g�ݗ��ẮA�������ǂ���Ȃ�ł����A�P�����ւ��܂����BCPU�{�[�h�̃s���t���[��������Ƃ���A�����悭������A�R��S���p�^�[�����Ȃ����Ă��܂����B�Ƃ����킯�ŁA�Q��̃s���t���[�������Ă݂܂����B�茳��50P������Ίy��������ł����A���������̂ŁA40P��10P���Q���A����Ă��Ă��܂��B
�s���t���[�����āA�ǂ����ďc�����ɂ���������ׂ��Ȃ���ł��傤�ˁ`�B�c�����ɖ������Ă���Ƃ��́A��������Ă���ڂ��Ă��܂��B
�ŁA������ǂ��g�����Ƃ����܂��Ɓc�i�g�����ǂ����́A���́A�S�R�l���Ă��Ȃ���ł����c�j
�s���w�b�_�̂ق��ɓd���������āA����ȃR�l�N�^�̂悤�ȕ�������Ă����A�e�X�g�p��CPU�̂����璼�ɐM�������o����悤�ɂȂ�܂��B
�����A�֗������I�Ǝv��ꂽ���̓g���C���Ă݂Ă��������B�͂��B
�Ƃ����킯�ŁA�f�o�b�K�o�R�Ńv���O�������s�ł��܂����B�����́A���悢��A���j�^�v���O�������Ԃ��āuROM�����v���悤�Ǝv���܂��B���āA���̊�A�ǂ�ȕ��Ɏg���Ă����܂��傤�B
|
���ĂƁB���́c |
G-Tune 2004FI�ڍ�
G-Tune
2004FI�̏ڍ����A�b�v���܂����B����̋@�̏Љ�́A1�y�[�W���̂ō���Ă݂܂����B�C�O�̃z�[���y�[�W���Ă���A1�����̂ň�C�ɏЉ�Ă�y�[�W�������āA�Ȃ�ƂȂ��������悩������ł���Ă݂܂����BSIPHA
SYSTEM�̂Ƃ�����A�s���TIOPIC�ŃA�b�v�������e�����ł͂Ȃ��ASIPHA TERM��Action
Script�ɂ��ĒNjL���Ă��܂��̂ŁA��낵�������猩�Ă��������B
����̕��́A�܂��{�`�{�`���ƎB���āA�A�b�v���܂��B
����SIPHA
SYSTEM
�����Ԋ�{�����͌ł܂��Ă�����ł����A���쐫���C�}�C�`�Ƃ������Ƃ������ԒɊ����܂����B����ρA����ōl���Ă���̂ƁA���ۂɐ���Ă݂�̂ł͑�Ⴂ�ł��B����́A�u��ԑJ�ځv����������āA�}�V�[�����u���Ⴊ��ł���v�Ƃ��u�������Ă���v���̏�Ԃ�SIPHA
CORE���F���ł���d�|�������悤�Ǝv���Ă��܂��B
�������@�ɂ́A�����AAction Script�̂�����K�w��́uB-Script�v�Ƃ����̂��l���Ă�����ł����c��肽�����Ƃ����Ă݂���A�uAction Script����ʂ�Action Script��Call�iJump�ł͖����j�ł�������v�Ƃ������_�ɂȂ�܂����B�܂��A��ԑJ�ڂ��A����ŕϐ���������̂ŁA�����������Ɗg������������Ȃ��ƁBSIPHA CORE���g�ł͎p���܂ł͊Ǘ������AAction Script�ŊǗ������悤���Ǝv���܂��B����ɂ���āA����悭����Ă��܂����u����~�X�ł�����v�Ƃ����̂�h����悤�ɂȂ邨�����܂��B
G-Tune�̏ꍇ�A�y�ʋ��ŃT�[�{�p���[���������Ƃ���A�����₤�����̑��ʂȓ��������K�v������A�ǂ����Ă��R�}���h���������܂��B������~�X���邱�ƂȂ��Ăяo���Ă������߂ɂ́A���낢��v���O�����ŃI�y���[�V�������T�|�[�g���Ă����K�v������Ǝv���܂��B
����G-Tune2004FII�\�z
�ڂ��ڂ����Ǝ���G-Tune�̍\�z���l���Ă��܂��B�^�C�g���̒ʂ�A�܂����ǂł������ƍl���Ă��܂��B�܂��A���M�����[�V�������ς��Ȃ���A���������AJ-Class�ƃ_�u���G���g���[�ōs�����ƍl���Ă��܂��B�܂��A����AG-Tune��@�������Ă��܂����̂ŁA�����q�g�l�^����Ȃ��ƃ_���ł��ˁ`�B
�܂��A����Ԃɍ���Ȃ������|�C���g�Ƃ��āA�ȉ��̂��̂�����܂��B
- ���߂̑�Z
- ����n�v���O�����̉��P�iJ-Class�̎��ɖ��_�ɋC�Â��܂����c�j
- �L��/�����ł̑���R���g���[���̋��ʉ�
- ���CPU��~��i���S�ł͂���܂���ł����j
- SIHPA TERM�փV�i���I�@�\�lj��i�����̃T�[�{�ʒu�L������Action Script�����̂ł͂Ȃ��A���ԁA����A���[�v���ӎ������ҏW���ł���G�f�B�^�j
���ƁA�������Ă݂ė~�����Ȃ������ƂƂ��Ă͎��̂悤�Ȃ��̂�����܂��B
- �U������̌������i������ӎ������U������j
- �g�̂̌X�������m���āA����̈��艻����i���s�ȊO�̗�ōs���ƁA�������グ���Ă��K�݂����Ȃ����j�B ����ɂ��ẮA�܂��A�����x�Z���T�����ŁA�ǂ��܂łł��邩�����Ă݂悤�Ǝv���Ă��܂��B
- �������̃��J�f�U�C���ύX�i�s�b�`����S03T�������Ă��悤�Ǝv���Ă��܂��j�B
- Action Script�̂���Ȃ�i��
- SIPHA TERM�̃\�t�g�����i���\�A�킩�炸�ɂ����������������ŁA���g�����Ⴎ����j�B
���J�n�̉��ǂ�Action Script�̍�肱�݂́A����ROBO-ONE�̃��M�����[�V���������Ă���n�߂�\��ł����A���͊p�x���o�ł��B�W���C�����g���̂���ʓI�Ȃ̂ł����AH8/3664�̃|�[�g������Ȃ��Ȃ��Ă��܂����A�l�i����⍂�߁B�����A�ǂ����悤�B
��Ԃ����̂́A���݁AR/C�v���|�ł���Ă���ʐM���AKO����̖����R���g���[�����j�b�g�ɕύX���āA���͂��V���A���ɕύX���AR/C��M�@���͂ɓ��ĂĂ���|�[�g��]�p���Ă��܂��Ƃ��̂��x�X�g�ł��B���ꂪ�ł���ƁA�T�[�{����20ch���ێ������܂܂��������Ȃ�ł����ǂȁ`�B
�܁A�܂��͉����x�Z���T�̎g�����ŁA�Ȃ�Ƃ��g������x�ɂł��Ȃ����A���낢��g���C���Ă݂悤�Ǝv���Ă��܂��B
|
G-Tune 2004FI�̐���� |
G-Tune
2004FI�̐����
����̐���ɂ���������p�ł����AROBO-ONE�̃f�����Ŗ�X���~�ƌ����܂������A��G�c�ȓ���͈ȉ��̂Ƃ���ł��B���ۂɂ́AROBO-ONE�G���g���̂��߂ɁA�\���N���X�^���A�o�b�e�������K�v�ɂȂ�܂��B�o�b�e���͂S�����Ă������̂ł����A�S������Ă������Ƃ��l����ƁA������Ə��Ȃ��������ȁ`�B�o�b�e���p�b�N�𑝂₷���A�[�d��𑝂₷�������ق����������ȁ`���Ċ����ł����BJ-Class�Ő������A�Q���E���h�łP�p�b�N���炢�B�莝���ɗ]�T������A�S�̗]�T�̂��߂ɖ���ς������Ƃ���ł��B
�݂Ȃ���A�o�b�e���[�̏���ʂ��Ăǂꂭ�炢�Ȃ�ł��傤�H���N���X�}�V���̕��ŁA�u����Ȃ������v�Ƃ�������������Ⴂ�܂�����A���������Ƃ��肪�����ł��B
| ���i���� | �� | �P�� | ���z |
| AKI-H8/3664 �R�������x�Z���T ACB302 ���̑� (24C256�A��R�ALED...) DC/DC (MAX631,�R�C��,etc...) �����Z���T(GP2D12) �d�� (�����ȃ��C���A�V���R��) |
1�� |
\1,600 \2,000 ��\1,000 ��\1,000 \790 ��\2,500 |
\1,600 \2,000 ��\1,000 ��\1,000 \1,580 ��\2,500 |
| �v���| (�t�^�oT4VF) GWS GWR-4P �N���X�^�� (�P�Z�b�g) |
1�� 1�� 1�� |
\4,000 \3,600 \1,850 |
\4,000 \3,600 \1,850 |
| �T�[�{ GWS MICRO-MG
(�U�Z�b�g) �T�[�{ GWS S03T (�U�Z�b�g) GWS S15�p���^���M�A |
2�� 1�� 6�� |
\19,800 \9,800 \1,200 |
\39,600 \9,800 \7,200 |
| ABS
(2,3mm���A��) �l�W�A�X�y�[�T�� |
1�� 1�� |
��\2,000 ��\3,000 |
��\2,000 |
| �o�b�e�� (GP-NiMH850) �[�d�� (�H���L�b�g) �[�d��p�d�� (12V2A) ���d�� (�H���L�b�g) |
6�� 1�� 1�� 1�� |
\200 \1,300 \1,100 \1,200 |
\1,200 \1,300 \1,100 \1,200 |
| ���v | ��\85,530 |
����́A�Z���T�����������ڂ��܂��̂ŁA�{�̂łX���~�㔼�A����R���g���[�������킹��ƁA���悢��10���~�I�܂ł��������ł��B
|
SIPHA CORE�̐�����@ |
ONO����̃z�[���y�[�W�����Ă�����A������KRS-784ICS�P�O�Z�b�g40,000�~�I�����A�������������I�������A��4,000�~�ł����`�B�����v���Ȃ���KO����̃z�[���y�[�W���Ă�����AKRS-784ICS 12�Z�b�g��\52,500�Ƃ����̂��I�����A�Z�b�g�Ŕ����ƂQ���܂����ł����B���`��A���`��BMICRO-MG���U��19,800�~�i�P�������A3,300�~�j�ł�����A���X�Ɉڍs���Ă����ɂ́A�������i�����B���`��A���`��B�ł��A���̐�A�W���C���Ƃ��ڂ���Ɛ���10���~�z�����Ⴄ���ȁ`�B�Ƃ肠�����A���͂�������������Ȃ�����A�܂������� (^^;�B
J-Class�Ő���Ďv���܂������AKRS-784ICS�A���������������̃T�[�{�ł��B�C���[�W�I�ɂ́A�u�����T�[�{���܂����v����Ȃ��āA�u�n�C�X�y�b�N�T�[�{����R�X�g�_�E���T�[�{�����܂����v���Ċ����ł��B���܂��`���܂����H�H�H
���āA�悤�₭SIHPA CORE�̐�����@�ɂ��Ă܂Ƃ܂�܂����̂ŁA�A�b�v���܂��B��{�I�ɂ́A�O��̂��̂��@�\�A�b�v�����悤�Ȍ`�ɂȂ��Ă��܂��B������@�T�v
��{�I�ɂ̓T�[�{��������ł���20msec�i�{���͂���������������16msec���炢�ɂ�������ł����c�j����Ƃ��āAR/C��M�@�p���X�A�e�Z���T�[�̒l�̓ǂݍ��݂��s���A����ɉ�����Action
Script�����s����悤�ɂȂ��Ă��܂��B���ꂪ�O���O���܂���Ă��邾���ł��B���̂Ƃ���A���ׂĂ̓����Action
Script�ɂ���Đݒ肵�Ă��܂��B
�P��������́A20msec�Ŏ��s���Ă���A�T�[�{����M���o�̓t�F�C�Y�ƋO���v�Z�t�F�C�Y�ɕ�����Ă��܂��B�T�[�{����M���́ATimerW�̊��荞�݂��g�p���ďo�͂��Ă��܂��B�܂��A�v���|���͂̓p���X�l�ł��̂ŃJ�E���g����K�v������܂����A����́ATimerV��0.128msec�̃J�E���g�A�b�v�ɂ���čs���Ă��܂��B��Ő������܂����ATimerV�̊��荞�݂�TimerW�̊��荞�݂������ɔ�������ƁA�T�[�{�̈ʒu���߂������܂��̂ŁATimerV�̊��荞�݂́A���ۂɂ͋O���v�Z�t�F�C�Y�ł����g�p���Ă��܂���B����ɂ���ɃV���A��EEPROM�̓ǂݍ��݂�����킯�ł����A����́A�ǂݍ��ݒ��̓v���|���͐M���̉�͂𒆎~���āA�ǂݍ��݂��s���Ă��܂��B
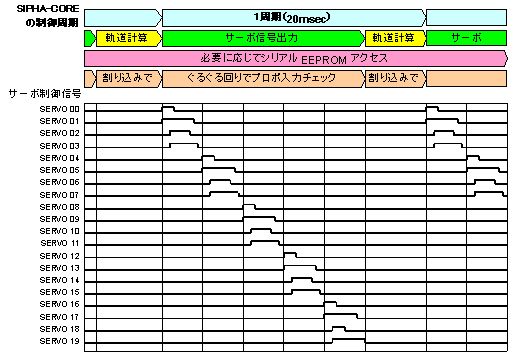
- �T�[�{����M���o�̓t�F�C�Y
TimerW���g�p�����A�S�{�P�Z�b�g�̃T�[�{����M���o�͂ł��B�A�i���O�T�[�{�́A�ǂ�������M������ꂽ�^�C�~���O�Ń��[�^�ɓd���𗬂��悤�Ȃ̂ŁA0.5msec�łQ�{���ɕ��U����悤�ɂ��Ă��܂��B���[�^���Ă̂́A�N��������u�Ԃ����Ȃ�d���H���܂��̂ŁA ����̑�ł��B���Ԃ�A�f�W�^���T�[�{�ł͂��܂�Ӗ��������Ǝv���܂��B
�T�[�{����M����0.6�`2.4msec���x�A�����0.5msec�̂��炵������܂��̂ŁA�S�{�̃T�[�{����M����3msec�ň�ʂ�̎d�����I��邱�ƂɂȂ�܂��B������T��J��Ԃ��ĂQ�O�T�[�{�̐���M���o�͂��s���Ă��܂��B
���݁A�S�̂ŁA20msec�̐�������ɂȂ��Ă��܂��̂ŁA�ł����������������Z���������ƍl���Ă��܂��B�A�i���O�T�[�{�̏ꍇ�A��ł����A20msec���15msec�̕����g���N�A�b�v���邩��ł��B - �O���v�Z�t�F�C�Y
�c���5msec�ŁAR/C��M�@����̐M���ɂ�鎟����̌���A�T�[�{�O���v�Z�i�p�x��ԁA���W��ԁj���s���܂��B���W��Ԃ̕������\�w���B�ŁA�o�^���A�p�x��猻�݂̍��W���v�Z���Ă���̂ł����A �S�ẴT�[�{�{�r�̍��W�o�^���s���ƁA5msec�Ŕ[�܂�Ȃ��Ȃ��Ă��܂��܂��B���̂��߁AAction Script�̕��ŁA1Clock�i=20msec�j���炵�ēo�^���Ă��܂����Ă��܂��B���g���₷���V�X�e����ڎw�����߁A���̂�����̏������x���P������̉ۑ�ł��B - R/C��M�@�̐M�����o
R/C��M�@�M���̓T�[�{����M�����l�A�p���X�ł��B�����TimerV���g����0.128msec���ɃJ�E���g���Ă��܂��B�������A���ʂɊ��荞�݂ł���Ă��܂��ƁA�T�[�{����M�������ƂԂ��������ɁA�W�b�^�̃��g�ɂȂ�܂��B�����ŁA�T�[�{����M���o�̓t�F�C�Y�ł́A���C�����[�`���̂ق��ł��邮������TimerV�̃I�[�o�[�t���[���Ď����ăJ�E���g�A�b�v���s���A�N���v�Z�t�F�C�Y�ł͊��荞�݂��g���ăJ�E���g�A�b�v�����Ă��܂��B - �V���A��EEPROM�̓ǂݎ��
����ł́A�V���A��EEPROM�͂ǂ�����ēǂݎ���Ă��邩�Ƃ����܂��Ɓc���ƁA���̑O�ɁA���A�V���A��EERPOM��ǂݎ���Ă��邩�ł����A�u�N�����ɏ����ݒ�p�����[�^��ǂގ��v�A�uR/C��M�@����V����Action Script����w�����o�����v�A�u���s����Action Script����AAction Script�̃W�����v���߂����s���ꂽ���v�Ƃ����^�C�~���O�ɂȂ�܂��B
�ʏ�̐��䒆�́AAction Script���݂̂ݔ������܂��BAction Script�f�[�^�́A�����Ƃ��傫�����̂�1KByte���ł��B
�ŁA�ǂݎn�߂���c�v�����āA�T�[�{����M�������ȊO�̏����͂��ׂĒ�~���A�V���A��EEPROM�ǂݍ��ݏ����ɏW�����܂��B���ہA�ő��30msec���x�ł��̂ŁA�����A�C�ɂȂ�悤�Ȃ��Ƃ͖����ł��BR/C��M�@�������A�둀��h�~�̂��߁A�ŒZ��60msec�ŃV�X�e���ɔ��f����܂��̂ŁA����ȉ��Ȃ�A�e���͂���܂���B���̂�����̊��������A���Ɏ����炵���Ǝv���Ă��܂����肵�܂��B - �����x�Z���T�A�����Z���T�̓ǂݎ��
����A�ǂ���̃Z���T���A�i���O�ł��̂ŁA���R/C��M�@�M�����o�Ŏg�p���Ă���I�[�o�[�t���[�^�C�~���O�ŃX�L�������[�h���ւ��ēǂݎ������Ă��܂��BH8/3664�ɂ́A�A�i���O�ϊ������W���[���Ŏ����I�ɂ���Ă����Ă����X�L�������[�h�Ƃ��@�\������܂��B�����A���̃X�L�������[�h�A��x��4ch�����ł��܂���B���̏ꍇ�A�����x�Z���T3ch�A�����Z���T2ch�Ƃ������ƂŁA5ch�ƂȂ�A����������������Ă��܂��B
���ۂɂ́A�����x�Z���T�A2ch���i�O�㍶�E�j�����g�p���Ă��Ȃ������肷��̂ŁA������͂����Ă��������ȁ`�Ǝv���Ă�������܂��B���Ƃ��Ƃ̗\��ł́A�|�ꔻ��̐��m�x���グ�邽�߂ɏ㉺�����̒l���ǂݎ���Ă��܂����B
|
���������cOAKS16-MINI |
OAKS16-MINI ���́A������T�ԁA�I�[�N�X�d�q�����l�T�X�̃z�[���y�[�W����}�j���A�����_�E�����[�h���Ē��߂Ă�����ł����AOALS16-MINI�A�P�����Ă݂܂����B�w����́AROBO-ONE�ɂ��G���g���[����Ă����`���[���[����������ł��B
���́A������T�ԁA�I�[�N�X�d�q�����l�T�X�̃z�[���y�[�W����}�j���A�����_�E�����[�h���Ē��߂Ă�����ł����AOALS16-MINI�A�P�����Ă݂܂����B�w����́AROBO-ONE�ɂ��G���g���[����Ă����`���[���[����������ł��B
�l���Ă݂��OAKS16-MINI�A�Ȃ�ƂȂ��ł����AAKI-H8/3664�������ăp�t�H�[�}���X�������悤�ȋC�����܂��BI/O���͂قړ����i1�{����OAKS16-MINI�̕��������j�悤�ł����AROM��H8/3664�̔{�A�N���b�N��������Ƒ����ł��B
����A�t���L�b�g�i�e�X�g�p�}�U�[�{�[�h����R���p�C���A�{�́A�d���܂ň�ʂ���Ă���j���w�������̂ŁA5000�~�z���܂������ACPU�{�[�h�P�̂ł݂���1500�~���炢�ł��B�܂��t���L�b�g���A�H���ŏo�Ă���uH8/3664�J���L�b�g�v���1000�~�قǍ����̂ł����A�d������������Ă���̂ŁA��r���Ă��������̂ł͂Ȃ��Ǝv���܂��B
�����A���̎ʐ^�ɂ́A�uLCD�������{�[�h�v���ڂ��Ă��܂����A���g�ɂ͊܂܂�Ă��܂���̂ŁA�v���ӂł��B���O�ɁA�I�[�N�X�d�q����}�j���A���𗎂Ƃ���܂��̂ŁA����Ń`�F�b�N���Ă����킩�邱�ƂȂ̂ł����A�I�v�V�����ł��B�ł��A�u�����Ǝv���Ă����v�̂ɁA�u����LCD�̎ʐ^�����Ă��āAFullKit�Ə����Ă������v�̂ŁA������Ɗ��҂��Ă��܂��܂����B
OAKS16-MINI�̃s��


���āA�u���̃{�[�h�ɂ��Ă���s���́A����Ȃ��̂Ȃ̂ł͂Ȃ����낤���H�v�Ƃ������Ƃ������ƋC�ɂȂ��Ă�����ł����A�茳�ɂ������H���ōw������26P�̂��̂Ɣ�r���Ă݂���A�ς��ƌ��Ƃ��A�}���Ă݂������Ƃ��͂���Ȃɍ��͂���܂���ł����B�莝���̕��i�ł��g�������ł��B
�����R�A�ɂ��悤���ǂ����A�܂������܂ł͍l���Ă��܂��A�ŋ߁A�����ԃ}�C�R���v���O���~���O�Ɋ���Ă��܂����̂ŁA�u���[�R�X�g�A�n�C�p�t�H�[�}���X�v�Ȃ��̂�����A���낢�뎎���āA���J���Ă��������Ǝv���Ă��܂��B�܁A�܂��̓R�e�����ɁALED�̓_�łł�����Ă݂邱�Ƃɂ��܂��B
|
SIPHA CORE�̃\�t�g�E�F�A |
��ɂ���ďo�����Ă��܂����B�������Ċ����ł����A�܁AROBO-ONE�łԂ���Ȃ��Ă悩�����Ƃ������ƂŁc�B�ӂ��B
SIPHA
CORE�̃\�t�g�E�F�A�\��
����܂����܂�ς��h�����܂��ASIPHA
CORE�̃\�t�g�E�F�A�\���͂���Ȋ����ł��B�}���`�^�X�N���ɏ����Ă���܂����A���ۂɂ̓V���O���^�X�N�{���荞�ݏ����ł��B�����A���������ӂ��ɐ������č��ƁA�����ƃ����e�i���X�Ƃ��`���[�j���O�����₷���̂ŁA�������̂悤�ɍ���Ă��܂��B�O��A��������Ȃ������������A�悤�₭�������܂����i���łɈ����Ƃ���������Ă��܂������ǁj�B
�Z���T�����n���������ꂼ��̃��W���[���́A�T�[�{�����������{�Ƃ��Ē����Ăяo���悤�ɂȂ��Ă��܂��B�ق�A�T�[�{��Ԍv�Z�Ƃ����āA���ɃT�[�{����M�����o�����܂łɌv�Z��������ł���ˁB�܂��AAction Scirpt���s�����������ł��B�ŁA�Z���T�Ƃ�R/C��M�@�����𒀎��s���Ă���Ƃ��������Ńv���O��������Ă��܂��B
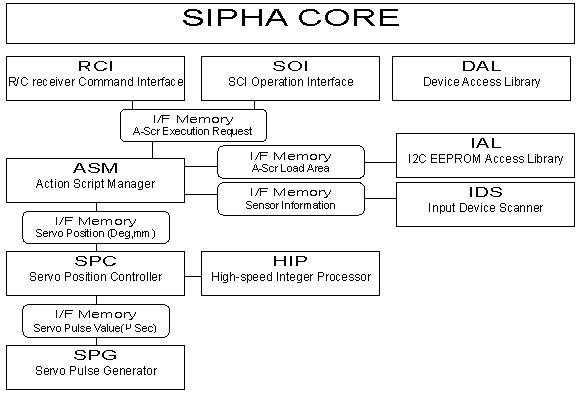
- RCI (R/C receiver Command
Interface)
R/C��M�@����̐M�������́AIDS�ɂ���ď�������ăv���|�̃X�e�B�b�N�ʒu�Ƃ��ĕۑ�����܂��B���̃��W���[���́A���̏������ɂ��Ď��Ɏ��s����Action Script�����肵�܂��B�O��A���[�h�Ȃǂ��ӎ������A������ƋÂ�������ɂ��Ă����̂ł����A����̓V���v���ɃR�}���h���Ɏ��s����Action Scirpt�ԍ����Œ肵�A�����P���ɁA������������Ă���ΐV����Action Script��ASM�ɗv������Ƃ����\���ɂ��܂����B�����P�A���s���x���i�v���C�I���e�B�j���䂪�����Ă���A���ݎ��s����Action Scirpt�̎��s���x�����A�V���Ɏ��s����Action Script�̃��x�����������Ƃ��̂ݏ㏑���i�I�[�o�[���C�g�j���s���܂��B
���́A�u���s���x���v�́AAction Script�ɂ��炩���ߒ�`���Ă�����̂ł��B����ɂ���āA�u�ҋ@�����[�v�����v����u���s�v�Ȃǂւ̓���ֈڍs�ł���悤�ɂ��Ă���܂��B�܂��A�u���s�v�Ȃǂ̓��삪���������Ƃ��́A���R�A�v���|�̃X�e�B�b�N�̓Z���^�[�ɖ߂��Ă���킯�ŁA����ɂ���āA�܂��u�ҋ@�pAction Script�v�����s�J�n���܂��B�u�ҋ@�pAction Script�v�̒��ɂ́A�O�̎p������̈ڍs������A�ҋ@���ɍs�������i����̓J���ł����A����͎����o�����X�Ƃ����������ł��j�������Ă���A���[�v���đ҂悤�ɂȂ��Ă��܂��B
�����A�p���ڍs�Ȃǂłǂ����Ă�����Action Script����̏㏑�������������Ȃ��ꍇ�́A���I��Action Script�̒��Ŏ��s���x���𑀍삷�邱�Ƃ��ł��܂��̂ŁA�u�ҋ@���[�v�̂Ƃ���͎��s���x����Ⴍ�v���āu�p���ڍs���̎��͎��s���x����������v�Ƃ������Ƃ��ł��܂��B����������A������Ƃ������A��ŋC�����āA����~�X�ɋ������ꂽ�Ƃ���ł��B - SOI (SCI Operation
Interface)
SCI�ʐM���W���[���ł��BSIPHA TERM����̃R�}���h��͂���Ȏd���ŁA �������̓ǂݏ����A�V���A��EEPROM�Ƃ̓ǂݏ����𒆐S�Ƃ��āASIPHA CORE���̂̃��[�h�ύX�@�\�Ȃǂ������Ă��܂��B��̃\�t�g�E�F�A�\���}�����Ă��������Ƃ킩��܂��悤�ɁA�e���W���[���Ԃ̃C���^�[�t�F�C�X�́A�������ʼn�݂���悤�ɂȂ��Ă��܂��B�܂�A���̃������G���A�Ƀf�[�^���������ނ��Ƃɂ��A�ʃ��W���[������v���������@���U�����܂��BSIPHA TERM����T�[�{�������肷��ꍇ�A�{���ASPC����SPG�ɗv�����邱�ƂŃT�[�{���삷��悤�ɂȂ��Ă���Ƃ�����A����SOI���W���[������āA�������ɗv�����e���������ނ��Ƃœ��삳�����悤�ɂȂ��Ă��܂��B
�܂��A�ɗ̓T�[�{��������Ȃǂɉe���������悤�ɂ��邽�߂ɁA���M�����Ȃǂ͌��\�A���G�ɂȂ��Ă��܂��܂����B - DAL (Device Access
Library)
�V���A���ʐM�Ȃǂ̃��C�u�����ł��B - IAL (I2C EEPROM Access
Library)
�V���A��EEPROM�A�N�Z�X�p�̃��C�u�����ł��B�O��AH8/3664�ɓ�������Ă���I2C���W���[�����g�p���ăV���A��EEPROM�ɃA�N�Z�X����悤�ɂ��Ă����̂ł����A����͎��O�ŗp�ӂ��܂����B���ʂƂ��āA�����ƒʐM���x�͉�����܂������A�T�[�{����M�������Ȃǂ̊��荞�ݏ����ƕ��p���Ă���肪�������Ȃ��Ȃ������߁A�u���Ԃ�D���ăA�N�Z�X�v���̏������s�v�ƂȂ�܂����B ����A���Y�ꂽ�̂ł����A�����DAL�ɓ��������\��ł��B - ASM (Action Script Manager)
Action Script�̊Ǘ����W���[���ł��B���s�v���ɏ]���āA�V���A��EEPROM���烁������Action Script�f�[�^�����[�h���A�R�}���h����͂��Ȃ�����s���܂��B�d���d���ɂ��Action Script�̐�ւ���A�����x�Z���T�ɂ��p�����蓙�������ōs���AAction Script�̒��ŃW�����v�����肷��悤�ɂȂ��Ă��܂��B
�������̃��[�h�G���A�́A250���R�[�h�ŁA��́A���O�R������̋N���オ����������S�Ă̓��삪�ꔭ�œ��삳����邮�炢�ł��i�������A�J�E���^�ɂ�郋�[�v���\�Ȃ̂ŁA��������p���Ă̘b�ł����j�BAction Script����ʂ�Action Scirpt�Ƀ`�F�[�����邱�Ƃ��\�Ȃ̂ŁA����Action Script�������ꍇ�ł��AAction Script���ʂ�邾���ŁA���ɂȂ邱�Ƃ͂���܂���B�܂��A�t���Ƀ��[�h���Ă��A���\msec���x�Ń��[�h���܂��̂ŁA�����ڂɂ́A�قƂ�ǂ킩��܂���B
���݁A32K�o�C�g�̃V���A��EEPROM���������Ă��܂����A��7000���R�[�h�L�^�\�ŁA�����G-Tune�̓���ł�5000���R�[�h�g�p���Ă��邾���ł��B - IDS (Input Device
Scanner)
R/C��M�@�A�����x�Z���T�A�����Z���T�A�d���d���̏����ASIPHA CORE���ň�����悤�ɂ��邽�߂̃��W���[���ł��B���̂́A�ʏ�̊��Ƃ��ČĂ�镔���ƁATimerV�ɂ��0.128msec�̊��荞�݂���ē��삷�镔���ɕʂ�Ă���A�T�[�{����M���������͒ʏ�̊��Ƃ��ČĂ�ĐM����͂��s���A�O���v�Z�Ȃǂ����Ă���Ƃ��͊��荞�ݏ����ɂ���ĐM����͂��s���܂��B����ɂ��ẮA��ŁA�S�̂̐�������̐��������܂��̂ŁA�����Ő�ւ��|�C���g��������܂��B
�܂��ASOI����̗v���ɂ��AR/C��M�@��荞�ݏ����𒆎~���A�ς��ɁASOI����_�~�[�̃f�[�^��ݒ肷�邱�ƂŁAROI��ASM���`�F�b�N����u�v���|�̃X�e�B�b�N�ʒu�v��SOI����R���g���[���ł���悤�ɂ��邱�Ƃ��ł��܂��BJ-Class�ŃV���A���R���g���[����G-Tune�삳�����Ƃ��́A���̋@�\���g�p���܂����B - SPC (Servo Position
Controller)
�T�[�{�̕�ԓ��삪��Ȏd���ł��BASM������A�u���x���牽�x�܂ŁA���N���b�N�œ���v�Ƃ����`�Ŏw��������܂��̂ŁA����ɉ����ĕ�Ԍv�Z�A�y�уT�[�{�̊p�x����p���X�ւ̕ϊ��AXZ���W�n����̃p���X�ւ̕ϊ����s���܂��B - HIP (High-speed Integer
Proccessor)
sin�Acos�Aatan�Aroot�̌v�Z���s�����W���[���ł��B�O�p���ɂ��ẮA�e�[�u���ɂ���Čv�Z���s���Ă��܂��B�܂��Aroot�ɂ��Ă̓j���[�g���@���g���Čv�Z���Ă܂��B���̃��W���[���ɂ���āA�uXZ���W����e�T�[�{�̊p�x�v�Z�v�Ȃǂ��s���Ă��܂��B - SPG (Servo Pulse
Generator)
�T�[�{�p���X�����郂�W���[���ł��B���ۂɂ�TimerW�̊��荞�݃��[�`���ł��B��ɂ���āA�S�{�łP�����Ƃ��Ă���̂ł����A�Q�{�ÂA0.5msec���炵�ďo�͂���悤�ɂȂ��Ă��܂��B����́A�˓��d�������炷��ł��BG-Tune 2004FI�͒P�S�~�U�Z���œ��삳����̂ŁA�ǂ����Ă������Ɏ��o����d���ő�l���Ⴍ�Ȃ�܂��B�����ŁA�����Ƃ��d���������u�N���̏u�ԁv�������ł����������邽�߂ɁA���̂悤�ɂ��܂����B
��{�I�ȃv���O�������̂́A�u�ŏ��ɐM��ON�v���Ă����āA�uGRA�`D�̃R���y�A�}�b�`�ŐM��OFF�v������̂ł��B���S�ł͂Ȃ��̂ł����A�T�[�{�W�b�^���ɗ͌��炷�悤�ɂȂ��Ă��܂��B��̓I�ɂ́A���̂S�̃T�[�{����M����OFF�^�C�~���O�����炩���߃`�F�b�N���A�O�̊��荞�ݏ����ɂ���āA���̊��荞�ݏ������x���\���̂��銄�荞�݂�T���܂��B�ŁA�����x���\��������ꍇ�iOFF�^�C�~���O���߂��ꍇ�j�A�O�̊��荞�ݏ����̒��Ŏ��̊��荞�ݏ�������������̂�҂��A�������������炻�̂܂�������悤�ɂ��Ă��܂��B����āA���̊��荞�݂́A�O�̊��荞�݂ɋz�����ꂽ�`�ɂȂ�܂��B
�ƁA�܂��A��{�I�ȃI�y���[�e�B���O�V�X�e�����v���O�����ō\�z���Ă����A��́AAction Script�łȂ�Ƃ�����Ƃ����`�Ŏ������Ă��܂��B���ꂾ���ɁA����́A�����Action Script�̋@�\��lj����āA�u�����Z���T�v�A�u�d���d���v�A�u�����x�Z���T�ɂ��p���v�A�u�ϐ��v��������悤�ɂȂ��Ă��܂��B
�C�ɂȂ�v���O�����T�C�Y�ł����A�I�v�e�B�}�C�Y���x���Q�łQ�T�j�o�C�g�قǂł��B�܂��܂��]�T������܂���`�i�����]�T������Ƃ����Ă������̂��͋^�₾���ǁc�j�B
|
SIPHA CORE�̃n�[�h�E�F�A |
SIPHA
CORE�̉�H�}
���܂�ς��h�����܂��ASIPHA
CORE�̉�H�}�͂���Ȋ����ł��B�������ɂ���Ă��ׂă\�t�g�h���C�u�ŁA�T�[�{����Ɏn�܂���R/C��M�@��荞�݁A�e��Z���T��荞�݁A�S��H8/3664�ł�邱�Ƃ��ł��܂����B��A���낢�날��܂��āA�T�[�{�Ƃ̊Ԃɂ�1.5K���̒�R�������Ă��܂����A�����鎞�́A�����A5K�����炢�ɂ��悤�Ǝv���Ă��܂��B���̌��Ɋւ��ẮA���݁A�������ŁA�܂����̂����A�b�v���܂��B
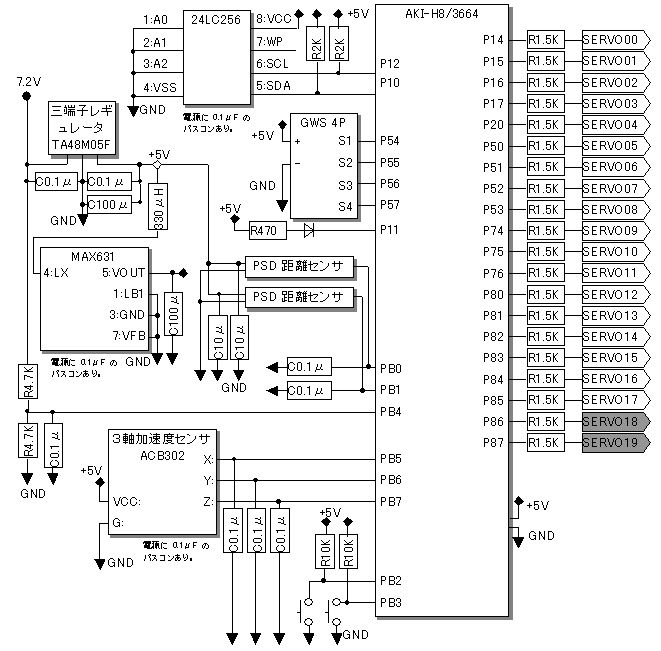
- �d����H
���̃��M�����[�^�A�H���d�q�ōw�������̂ł����A�Ȃ����J�^���O�y�[�W�̂T�u���猟������Əo�Ă��܂���B�u���M�����[�^�v�Ō�����������Əo�Ă��܂��B���́A�\�ʎ����Œᑹ���̂��̂�����̂ŁA�������̕���������������܂���B�܂��A0.1��F�̃R���f���T�̓`�b�v���i���g���Ă��܂��B���ۂɎg���Ă݂Ďv�����̂ł����A�`�b�v���i�A���\�A���j�o�[�T����Ƒ������ǂ��Ďg���₷���ł��B - ������H
���펞�ɂ͌��ǎg�p���Ȃ�������ł����A����AMAX631�Ƃ���IC���g���ăX�e�b�v�A�b�v��H��g�݂܂����B���i�ꎮ�́u�ᏼ�ʏ��v�ł��낦�邱�Ƃ��ł��܂��B�ȑO�A���|�[�g���܂������A���͂�3.5V���炢�ł�5V�o�́A2.5V�ł�3.7V�i30mA���j�ł܂��̂ŁAH8/3664�������炢�Ȃ���v�����ł��B��H�}�������Ă��������Ƃ킩��܂����A�}�C�R���A�����x�Z���T�AR/C��M�@�͏�����̓d�����g���Ă���A�����Z���T�̓��M�����[�^���璼�ڎ���Ă��܂��B����́A�����Z���T�����\�d�C��H�����߂ł��iMAX100mA���炢���ȁH�j�B
����Ŏg�p���Ȃ��������R�Ȃ�ł����A�ȑO�A�����s����CPU�n���O�A�b�v�������������ɂ͂����Ă��̂܂܂ɂ��ĖY��Ă����̂����R�ł��B����ăn���O�A�b�v�̌����ł͂Ȃ����Ƃ��킩�����̂ō���A�������Ďg���Ă݂悤�Ǝv���Ă��܂��B�ł��A�����Ė�肪���������Ƃ����Ƃ́A�K�v�Ȃ��H �i����ς�͂��������ȁc�j - �d���d���Ď���H
4.7K���̒�R�Ő��d����1/2�ɂ���H8/3664��AD�[�q�ɓ��͂��Ă��܂��B0.1��F�̃R���f���T�͕K�����܂��傤�B�O��A�����t���Y��ēǂݎ�肪�ł��܂���ł����B����́A�����ƖY�ꂸ�ɂ���܂����B����͓ǂݎ���āA�X�N���v�g�����̎��Ɏg���Ă��邾���ł����A����쐬���ȂǁA�}���ȓd���ω����Ď����Ă���A�T�[�{���b�N���̏Ǐ���ł���悤�ɂȂ邩������܂���B - �R�������x�Z���T
�O��AADXL202���g���Ă��č���AACB302�ɕύX�������R�ł����A���́uADXL202�𐅕��Ɏ��t����ꏊ�����������v����ł��B���̂��߁A�ǂ̌����ł����t���\�ȂR�����K�v�ɂȂ�A��������܂����iG-Tune�T�C�Y�Ȃ�ł̗͂��R�j�B�A�i���O���͂͂�������Ƃ��Ȃ������̂ŁA���낢��s���ł������A�N���オ�蔻�肮�炢�ɂ͎g���Ă��܂��B�N���オ�葀��́A�ǂ�Ȍ����ɓ|��Ă��Ă���������ŁASIPHA CORE�����肵�ċN���オ���Ă���܂��i���炢�I�j�B
�z�����̊W���A�����ɐM�������\�傫���t���t�����Ă��܂��B����ł�����ł��傤���c�B - PSD�����Z���T
G-Tune�̗��r�ɂ��Ă����ł����A10��F�����܂��Ă���̂́A��Γd���̃z�[���y�[�W�Łu���ꂽ�ق��������v�Ə����Ă������̂ŁA�A�i���O�ɎアSISO�Ƃ��ẮA�u�܁A�������Ƃ͂Ȃ��낤�v�Ƃ������Ƃœ���Ă܂��B - R/C��M�@
�O��g���Ă���GWS�̂��g���܂킵�Ă��܂��B - �V���A��EEPROM
�V���A��EEPROM�́AH8/3664�������Ă���I2C���W���[�����g�p�����Ɏg���Ă��邽�߁A���ʂ̃|�[�g�ɐڑ�����Ă��܂��B�Ȃ����{�����W���[�������Ă���P56�AP57�ɐڑ�����Ƃ��܂��ʐM�ł��܂���B�P�̗��R�Ƃ��Ă͏o�͓d�������̃|�[�g���Ⴂ�Ƃ����̂���������Ǝv���̂ł����A������ƌ����āc�ˁ`�H����Ȃ킯�ŁAP56�AP57�́A���̓|�[�g�Ƃ��Ďg���Ă��܂��B
|
ABS���H���x�� |
G-Tune2003A�̃o���V
�悤�₭�AG-Tune2003A���炵�܂����B�O����o�������������̂ł����A�J���̕���D�悵�Ă�����A�Ȃ��Ȃ����Ԃ����܂���ł��āc�BGWS�̒��y�ʃT�[�{���P�O����̂ŁASIPHA
CORE�J���p�ɁA�u�}�W��̕����{�v����肽���Ǝv���Ă���̂ł����A�ǂ����ȁB�M�A�������₷���ł����A���^�Ŋi�������Ȃ��薳���ł��傤�B

ABS���H�̐i��
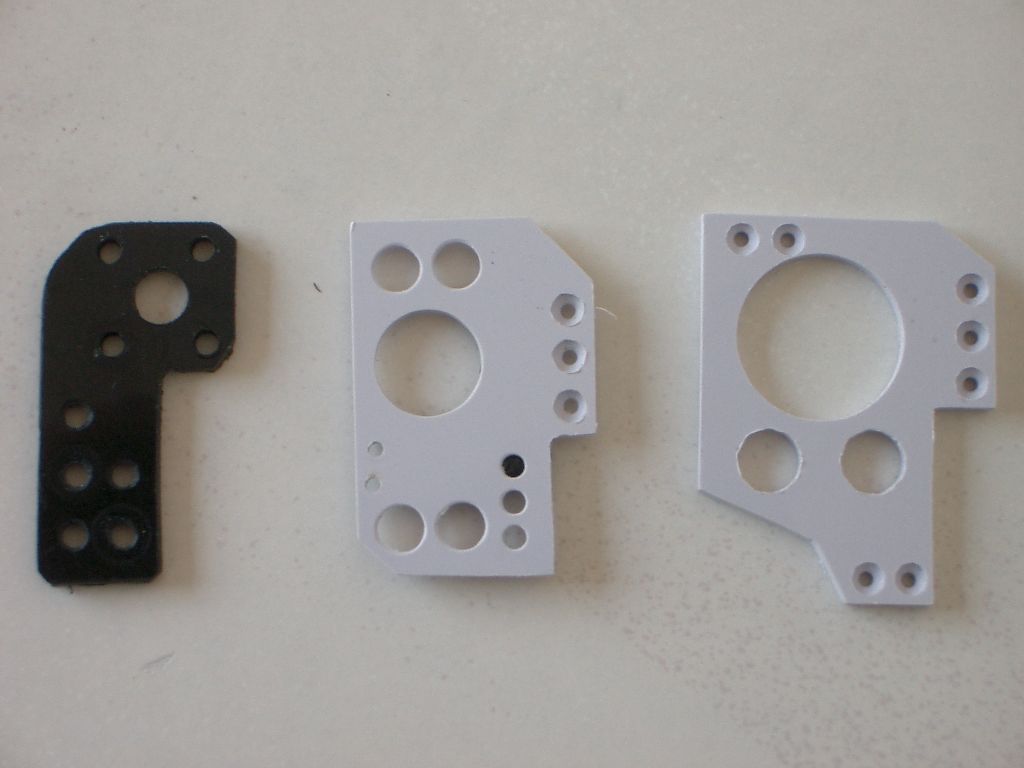
����G-Tune2004FI���I�����Ă������������AABS���H�̂��Ƃ�_�߂Ă��������܂��āA�ƂĂ����ꂵ�������ł��B�ł��A���́A�ŏ����炱���܂łł����킯�ł͂Ȃ��ł����A����Ƃ����āA�����o�����������킯�ł��Ȃ��ł��B��̎ʐ^���A������2003A�A2004F�A2004FI�Ŏg�p�����p�[�c�ł��āA�g�債�Ă݂�ƁA���H�̃f�L�̗ǂ��̍�����ڗđR���Ǝv���܂��B
���̃p�[�c�A�ق�ƂЂǂ��ł��ˁ`�B�g���Ă���H��͂قړ����Ȃ�ł����c�B�������ɂR��ڂƂ��Ȃ�ƁA���Ȃ��B���Ă���̂��킩��Ǝv���܂��B�A���~���H�Ȃ������Ƃ������Ǝv���܂����A�����H��A�������ł��A������ɂȂ��Ă������Ǝv���܂��B
���ꂩ��X�^�[�g����l�A���A�Ȃ��Ȃ����ꂢ�ɉ��H�ł��Ȃ��č����Ă���l�A�����炸�Ɋ撣���Ă��������ˁI
���܂ɂ͑��̃}�C�R���ł�
�Ȃ��S�ɗ]�T���ł����Ƃ���ŁAH8/3664�ȊO�̃}�C�R�������܂ɂ̓`�F�b�N���Ă݂�B
�R�n�Ƃ����A����ς��I�[�N�X�d�q�Ŕ�������Ă���OAKS������ł��傤���B�T���v���i���ۂɂ͔����Ă���݂����ł����j��OAKS8���Ă����̂��������Ėʔ������ł��B����ł�SIPHA-CORE�̊�{�������炢�Ȃ瓮�������ł��i�S���͂�����Ƃ炢�j�B�V���A�����Q�{���Ă���݂��������B�܂��AOAKS16-MINI���Ă̂��������낻���ł��ˁ`�B���A����A�P�H�\�t�g���[�N�X�����SCC-02�̃}�C�R���ł��ˁB�X�y�b�N�I�ɂ͌��sSIPHA CORE��y���ɏ���\�͂̂悤�ȋC������̂ł����c�B
�ŁA���邷�������ƂɋC���t���܂����B
SCC-02�̒n���͉���Ă���I
�P�H�\�t�g���[�N�X����̃z�[���y�[�W�ɃA�N�Z�X����ƁA�u�P�H�\�t�g���[�N�X�{�n���v�̃��S���\�������Ǝv���̂ł����A���̒n���͉��܂���B�������ASCC-02�̏Љ�y�[�W������ƁA����Ă܂��A�n���B����A������������ŁA�S������ɂ������������Ǝv���̂ł����A�ǂ��ł��傤�H
���̎��������������ŁA�������������Ă��܂����̂ŁA�}�C�R�������͂����܂��ł��B�ł́A�ē��H�ׂɍs���Ă��܂��B�ł͂ł́I
|
�~�X�I�y���[�V������U���v���O���� |
����̔s���̂P�ɁA�~�X�I�y���[�V����������܂��B�~�X�I�y���[�V�����ɂ��������̎�ނ�����̂ł����A�u�v���O�����ɂ���đR��ׂ��U�����ꂽ�~�X�v�ɂ��Ă̘b�����܂��B���̂�����̃v���O�������I���W�i���ł���Ă�����ւ̎Q�l�ɂȂ��Ǝv���܂��B
SIPHA
CORE�̂œ��쌈��̎d�g��
SIPHA
CORE�ł́A�v���|����̐M����Ԃ�ǂݎ��A�Ή�����Action
Script�����s����悤�ɂȂ��Ă��܂��B���̂Ƃ��A�v���C�I���e�B���䂪�����悤�ɂȂ��Ă��āA�Ⴆ�A�p���`���s���ɒ����p���R�}���h�����Ă��A�p���`�s����悤�ɂȂ��Ă��܂��B
��̓I�Ȃ��̂Ƃ��ẮA���̂悤�ȃX�N���v�g�������Ă���܂��i���ۂɂ́ASWITCH/CASE�͎g���Ȃ��̂ŁA�����t��JUMP�ŋL�q���Ă��܂��j�B���ꂪ�ҋ@�p���̃R�}���h���Ƃɏ����Ă���A�O��Ԃ��ӎ����Ȃ���ҋ@��Ԃ�ύX���Ă����܂��B
�����ҋ@Action Script
SWITCH(�O�ҋ@�p��)
CASE ����
���������ɑҋ@���[�v�փW�����v
CASE ���Ⴊ��
���Ⴊ�݂��璼���֓���A�ҋ@��ԃt���O���u�����ҋ@�v
�ҋ@���[�v�փW�����v
CASE �i���ҋ@
�i���ҋ@����i�������֓���A�ҋ@��ԃt���O���u�i�������v
�擪����Ď��s�i��Ԃ��u�i�������v�Ȃ̂ŁA����CASE��������j
CASE �i������
�i���������璼���֓���A�ҋ@��ԃt���O���u�����ҋ@�v
�ҋ@���[�v
���s�_�c�}�����������R�}���h���s
��ŁA����A�u���s�����ȁ`�v�Ǝv�����̂��A��̃v���C�I���e�B������g���ăI�[�o�[���C�g�i�X�N���v�g�̏㏑�����s�j�@�\���A���r���[�ɂ���Ă��܂������Ƃł��B
�R���Z�v�g����������܂��ƁA�Ⴆ�A��������i���ҋ@�Ɉڍs���Ă���Ƃ��ɋ}���Ńp���`���o�������ꍇ�A�J�ڒ��Ƀp���`�R�}���h�����Ă��A�p���`���쎩�̂��i���ҋ@��ԂƂقړ����ł�����A���ɂȂ�܂���B������p���`�������o����Ƃ����A�����b�g������܂��B
�Ƃ��낪�c��L��Action Script���悭�ǂނƂ킩��̂ł����A�����オ�蓮��̎n�߂ȂǂŃI�[�o�[���C�g����ƌ��݂̏�Ԃ��X�V���ꂸ�A���͗����Ă���̂Ɂu���Ⴊ�݁v�ƋL�����Ă����肷�邱�Ƃ��N�����̂ł��B�܂��A�ʂ̖��_�Ƃ��āA�p���`�Ȃǂ̃R�}���h�����Ă����Ԃőҋ@��Ԃ̐�ւ����s�������ɁA�J�ړ���������Ɉڍs���Ă��܂��i���ꂪ�_���������̂ł����j���߂ɓ]�肵�Ă��܂��̂ł��B
�Ƃ����킯�ŁA�I�y���[�V�����Ɋւ���v���O�����́c
���S���
����Ԃł���Ƃ������Ƃ��A�����܂����BG-Tune�Ƃ̃V���N�����́A�܂��܂��Ⴍ�A����ǂ��^�C�~���O��_����قǂ̂��̂ł͂Ȃ��Ƃ����̂��ĔF�������̂ŁA�I�y���[�V�����ɂ��ẮA����Ɍ����Ă��Љ��P�������Ǝv���Ă��܂��B
|
ROBO-ONE�Q��L�`�{��g�[�i�����g |
�Ƃ����킯�ŁA�����������\�I�ʉ߂���Ă����̂ŁA������A��ɂ���āu�S�b�g���A�S�g�S�g�v�B��������������Ɂu�������Ƃ������Ɓv�BJ-Class�̂Ƃ��Ɋw���Ƃ�SIPHA CORE�ɋ������ށB��Z���s�������Ƃ��낾�������ǁA�C�}�C�`�������x�������B�Ȃ��Ȃ�����ł��B����Ȃ킯�ŁA��{����Ƒ�����̓p�^�[���̌������ɒ��͂��܂����B�܁A�I�y�~�X�h�~�̂��߂ɂ��������K�v���낤�Ƃ������ƂŁA�����͂Q���Ԓ��������Ƃ�܂����B
���i�R��
����ԁA�l�W�����������ɂ���ł��܂����B�����Ȃ��A���̂s�V���c�B�������ō��ꂽ��ł��傤���H�������܂��uG-Tune�v���Ă��������낤���ȁB���A���������A�M���̂҂��������́u���ʂ̊i�D�v�ł����B�u�M���v�Ďd�l���y���݂ɂ��Ă����̂Ɂ`�B�܁A����Ȃ���ȂŎ��i�R�����ς܂��i���i�R���͐��@�`�F�b�N�����ł��j�A�g�[�i�����g�̏��Ԃ����\�O�̕��������̂ŁA���̂܂܃o�b�e���d���`�F�b�N�Ȃǂ́A�����ɓ���܂����B
����� �����A�̕�����uJ-Class�̎��A��s���[�h�œo�ꂵ�ė~���������v�Ƃ������N�G�X�g������A���������Ȃ̂ŁA��s���[�h�œo��A�܂��͈ꔭ�ό`�B�����A�E�P���B�����̕�����������ƃt�H���[�������Ă��������Ă��܂��B
�����A�̕�����uJ-Class�̎��A��s���[�h�œo�ꂵ�ė~���������v�Ƃ������N�G�X�g������A���������Ȃ̂ŁA��s���[�h�œo��A�܂��͈ꔭ�ό`�B�����A�E�P���B�����̕�����������ƃt�H���[�������Ă��������Ă��܂��B
����̓G���g���[��120��Sunny�B�ς��ƌ��ADynamixel DX-116���ڂ̃��{�b�g�B�܁`�AG-Tune�ɂƂ��ẮA�債�����ł͂Ȃ������B�ǂ̃T�[�{�ɂ������āA�p���[��͑��x���l������ƂR�`�S�{�ȏ�͂���܂���ŁB���Ƃ��Ɗi���̏�ōl�����Ă���p�����[�^�Ȃ�ŁA�ǂ��ł������ł��B�܂��t���[���͏��Ȃ��Ƃ�FREEDOM III�̃A���ł͂Ȃ��B�ς߂�����Ȃ��̂����C�ɓ������悭�Ȃ������B����Ƃ��A���܂�ɂ�G-Tune���������̂łтт����̂��H�i��Ȃ��������������ˁ`�j
�ْ��̂��܂�A�������Ă��ɋ߂Â��Ă�������A�y���r�Ɉ����|�����āu�R�����v�����B����ρA��햳���͂����܂���B����Ȃ킯�ŁA�������荞��ł���₱��₵�Ă݂邯�ǁA�Ȃ��Ȃ��|��܂���B���́A�|����\���̂��錈��ŋZ�A�������Ȃ��玝���Ă����̂ł����A��������Y��Ă��܂����B�܂��A����A�b�v���܂��ˁB����ł��A�킸���Ȃ���ɉ����Ă��܂��B���ނ��ށBG-Tune�d�オ��ǍD�B�����������Ă��邤���ɁA���肪������������A�����I�y�~�X�Ń_�E���B����ɋN���オ��Ń����O���痎���I����ŏ������I����`���ꂵ���B�I����{�^�݂̂悤�ȏ������ł������A�����ƁAG-Tune��
�u����̃~�X��U���قǂ̋C�����������v
�Ƃ������Ƃɂ��Ă������c�B
�T�����ɖ߂�Ƃ��A�G���x�[�^�ŁASunny�̃I�[�i�⑼�̊؍��I��ƈꏏ�ɂȂ�����ł����A���̊؍��I��̕��ŁAG-Tune��Sunny�������Ă����̂ɋC�Â����悤�ŁA������G�炵�Ă���Ƃ��肢����Ă��܂��܂����B�؍��I��̃��{�b�g�͑S�ʓI�ɁA�����������Ă��Ȃ��悤�ł��B
����� �Ȃ�ƁA������{�����̑��c����HAJIME
ROBOT�BG-Tune�̏ꍇ�A�����Ɠ���̓_�ł�������Ă���̂ŁA���ЂƂ��P�킵��������ł��B����Ȃ킯�ŁA�����Ƃ��͑ł����ɁA���ʂ���K�`���R������B
�Ȃ�ƁA������{�����̑��c����HAJIME
ROBOT�BG-Tune�̏ꍇ�A�����Ɠ���̓_�ł�������Ă���̂ŁA���ЂƂ��P�킵��������ł��B����Ȃ킯�ŁA�����Ƃ��͑ł����ɁA���ʂ���K�`���R������B
���ĂƁA�n�߂̍��}�ƂƂ��ɂ��������Ɛi�߂āA�K�`���R�I�������������Ă݂�B�ӊO��G-Tune�����Ă��邪�AHAJIME ROBOT�̕����p���[�ォ�B�z���ȏ�ł��A���̔S��B
����ɂ��Ă��A�Ȃ�ƁAHAJIME ROBOT�̍U����G-Tune�ɓ͂��Ȃ��I�ǂ�����ƁAG-Tune�A���������̂ł��傤�ǐ^���ɓ���A�r���܂������͂��Ȃ��͗l�B
�A�b�p�[�U���łЂ�����Ԃ��̂�������߂��̂��AHAJIME ROBOT�������o���ɂ��������̂ŁA����ɍ��������Ăӂ������c����HAJIME ROBOT���A
�܂Â��ē]�т܂����B
�������A�����ł��łɋْ����܂���̃��^�N�V���A���̑��삪�悭�킩��܂��ʁB�Ȃ����Ƃ����ƁAHAJIME ROBOT�ɑ��āA�U���p�����t�ɂȂ��Ă��܂����̂ł��B�ǂ��������^�[���ł��邩�Ƃ����Y��Ă��܂��A���X�Ƀ����O�[�ɉ�����Ă����ƂƂ��ɁA����Ɏ����Œ[�ɍs���Ă��܂��A�Ȃ�ƁA�����O���痎�����c�B�����A���̂�����o���̍����A�x���̍����B
�Ƃ����킯�ŁA���������HAJIME ROBOT�ɕ����܂������A��������܂łQ���T�X�b�ԁA�t���ɐ킢�܂����BHAJIME ROBOT�̔S�苭���Ƃ������A���������́A�������z�����Ă��������Ƃ�����ƈ���Ă��邱�Ƃ��킩��A���������ɂȂ�܂����B����́A�������������ƃA���S���Y�����ǂ��Ē��݂܂��B
�����u��
���āA���y���݂̃����u���ł����A�����ɃX�^�[�g������A�����{�R�{�R������B���\�A���������Ƃ������������悤�ȋC������̂ŁA�������郂�[�V����������Ă����Ă��ꂽ�؍��I��Ɋ��ӁI����܂�݂�Ȃ�����ɂ��Ă���Ȃ��̂ŁA������|��Ă���̂������Ă݂��肵�����ǁA�Ō�͂Ȃ����p���[�_�E���B�ȂɎB���Ă�������r�f�I�����x���������܂������A���R�́c�o�b�e����ł��A���Z�b�g�ł��A�둀��ł��Ȃ������ł��B���Ԃ�A�A���ł��B�����������ׂ���A�����@���A�b�v���܂��B
�����u���ł�������������ł����A�~�X�I�y�����ł��B
�����u�����A���Ԃ�R�炢��s�@�ɂȂ�܂����B
���̂�����A���K�A�������͉��P���Ă����Ȃ��Ƃ����Ȃ������ł��ˁ`�B
�I����đޏꂵ�悤�Ƃ�����A�����O�e�ŁA�����Ȏq�����ڂ��P�����Č��グ�Ă���̂ɋC���t���܂����i�Q���̌ゾ������������܂��j�B�{���ɋP���Ă���悤�Ɍ����܂����B��������ƈꏏ�������݂����ł����A�ǂ����̃`�[���̂��q�������낤���HG-Tune�������G�点�Ă����A��������܂����B�Ȃɂ��A�����A�����M�������ł��B
�����āA�z�[�����o��ƁA����ɁAJ-Class�̓��������Ă���l���������\���邱�ƂɋC�����܂����B�C���^�r���[�Ȃ�Ď��肵�Ċy�������炵�Ă��炢�܂����B�ł��A�{���́c��邾�����܂������A�����܂���A�����܂����B����ȋC�����ł����B���̒��ł́A���ɉ��ǂ������Ƃ��낪��t�B
���̌�
���̌�́AG-Tune�̉��ǃ|�C���g�Ȃǂ��l���Ȃ���A�݂Ȃ���̐킢�U��������Ɣq�������Ă��������܂����BZippon���������ǁA�R���Ԃ����Ɗςɗ��Ă��������Ă��āA�ْ����Ă���g�Ƃ��Ă͂ƂĂ����肪���������ł��B���ƁA����A�������b�����Ă����������Ƃ����A�`���[���[�����ł��BJ-Class����ꏏ���������Ƃ������āA���낢��b�������Ă��������܂����B����ƁA������Ƃ����ł����A�N���C�m�̍�������Ə������b�����Ē����Č��h�I�g�삳����P�e�ŏ�������ł��܂����B
����A�g�[�i�����g�Ŏ��ۂɐ�������ƂŁA���낢��Ȃ��Ƃ��킩��܂����B����Ȃ킯�ŁA����G-Tune�́A����̃}�V�[���x�[�X�ŁA����ɑ��c�҂Ƃ̐e�a�������߂��}�V�[���ɂ��Ă������Ǝv���Ă��܂��B�܁`�A���b�L�[�Ƃ͂����A�������X���~�̏��^�y�ʔ�̓��{�b�g���A�g�[�i�����g�ł���Ȃ�ɑP��ł����Ƃ����̂��A�����ł����B
�����R�����A�����݂��킳���A���������̋�y���̈���Ƃ��Ċ撣���Ă��܂�����`�I����́u�����ꔭ�̃p���[�v�����������čs���܂��B
�Ƃ����킯�ŁA�u��������̂��������ŁA���Ă邩������Ȃ����{�b�g�����v�Ƃ��������������߂̓��́A�Ԉ���Ă��Ȃ��Ƃ������Ƃ��m�M�ł������ł����B


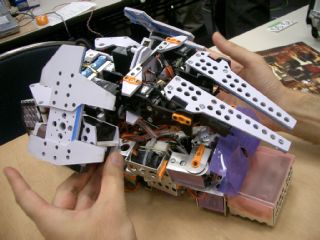
���܂�
��������A����Ɍ����āAG-Tune��͂ݏグ�郂�[�V��������Ă��Ă���邻���ł��B�f�[�^���W���̎ʐ^�ł��B������g�[�i�����g�i�o�ł���悤�A�����܂��`�B

|
ROBO-ONE�Q��L�`�{��f�����X�g���[�V���� |
ONO����̂Ƃ���ŏЉ�Ă�������Ƃ��ɁuROBO-ONE�Q��L�v�Ƃ���܂����B����������u�ԁA�u���ꂾ�I�v�Ǝv���A�^�C�g���C�����܂����BONO����A�ǂ������肪�Ƃ��I�ł��A���������ł��Ȃ��Ďc�O�ł��B
�f���v���O������肱��
�Ƃ��킯�ŁA�܂��͑O���̘b����BJ-Class���I����ďh�Ɍ������ƁA�Ȃ������������̎p���B�����Ɠ����z�e���������ŁB����Ƀ`�F�b�N�C�����Ă݂�ƁA������͉��̕����ł����i���ꂪ�A��̋C�͈ێ��ɑ�ύv�����Ă����j�B��ŁA�����Ă��傤���Ȃ��̂ŁA�܂��͋߂��̃t�@�~���X�ŐH�����Ƃ�A���ݕ��Ȃǂ�����Ńf���v���O�����쐬�J�n�I���������A�������������B�肽�������a���ő傫�ȃe�[�u��������A������܂����B�����A����܂菝����Ɛ\����Ȃ��̂ŁAG-Tune�ɂ͂�����葽�߂ɃS���p�b�h��\���Ă��܂����B��{�I�ɂ�ABS�ō���Ă���܂��̂ŁA����Ȃɏ��͂��Ȃ������Ǝv���̂ł����A�O�̂��߂Ƃ������ƂŁB
����Ă���Œ��A���x���A�u�܂�������v�Ƃ����C�����ɂȂ�܂����B����Ȏ��A���܂��Ɓc�u�������������A���Ƃ�A�������v�Ƃ��������ォ��c��������ł��B�����A�܂��撣���Ă���������B�Ȃ�ASISO���I�Ƃ����킯�ŁA�ĂыC�̓A�b�v�B�݂Ȃ���A���̕��͖{���Ɉ�Ӓ�������Ă��܂����B����ł����Ԃ̓j�R�j�R����Ă��܂����B�������ł��B
�����A��ʂ�̓�����q���Ď��Ԓ����B�悵�悵�B�Ƃ����킯�ŁA���Ljꐇ���ł����B
���O�R��
���ɍs���ƁA�����A�����̊�Ԃꂪ���܂����܂��B�����͂������ɐl���������̂ŁA���Ȏw��ł��B�䂪SISO
JUNK STUDIO�̌��ɂ́A�u�����T�m(���Ƃ�
�̂�Ђ�)�Ɩ����Ȓ��Ԃ����v�݂̂Ȃ����A�ړ����{�b�g����ψ���i��S��̎����O��ɍ����Ă��܂����j�A�O�ɂ��ق肳���A����ɂ��̑O�ɂ��e�����A���̕��ɂ�Kenji�����A�܂��A�܂��낳�����߂��̐ȂŁA�Ȃ��m������Ԃ����Řa�₩�ȕ��͋C�ŏ������ł��܂����B
�܂���2325-RV�̑傫���ɂт�����I��B��w�q���[�}�m�C�h�v���W�F�N�g�̐V�^�͂ł����ł��B���́ACUTE�ȕ������߂����Ȃ�悤�ȉ����͂ǂ��ցH�H�H���܂�ɂ��ł����̂ŁA��r�ʐ^����点�Ă��炢�܂����BG-Tune�́A�G�̏����ギ�炢�܂ł�������܂���B���̕��Ɏʂ��Ă���̂̓��C�^�[�ł��B���C�^�[���������Ă��A������2325-RV���炢�ł��B

�T�[�{�͓Ɛ��̃A���B�����ƁA�傫���͂Ȃ������ǁA�X�s�[�h�͑O�ȏォ���A�Ƃ̂��ƁB�������B����ς�ނ�͂������B�������������āA����ȃp���[�̂���T�[�{�ŏ]���ǂ��蓮�����Ă��܂����ƁB�T�[�{�̃p���[���������قNJy�ȖʁA���܂����Ȃ����������X�łĂ���킯�ŁA���̂�����̓����������Ƃ��Ȃ��Ă��邠����A����ς�^�_�҂ł͖����Ǝv���܂��B
���āA�����̕��ł����A���O�R���͈ꔭ���i�I�悵�悵�A������������������ƁB�c�ŁA�\�I�f���̏��Ԃ͂��������Ȃ�ł����A�u�P�v�ł����B��Ԃ���A��ԁB����ŁA�����A�����������Ȃ����Ƃ����߂܂����B�Ƃ����킯�ŁA�{���̓f���̂݁A�܂�A�����������Ȃ��Ƃ������ƂŁA�̂�т�Ɗy���ނ��Ƃɂ��܂����B
���āA�����̈ꖇ���Љ�܂��傤�I���C�^�[�ɐύڂ��ꂽG-Tune�ł��B
���Ă��āA��������낢��ȕ��ɂ���ł����̂ł����A�Ȃ�ƁA���傱�ς����A�O���e����ɂ�����Ċ����I�O���e����́A�O���A�r�f�I���B���ĉ������Ă���l�̒�����A�Ђ���Ƃ��Ă��̕����ȁ`�Ǝv���Ă����̂ł����A����ς肻���ł����B���傱�ς���́A�ȑO����x�A���b���Ă݂���������ł��B�����܂���A�������ْ����Ă��܂����B����́A�����Ƃ��낢��Șb�����Ă��������B���ɂ��A����ς����ΐ삳���ɂ���ł��܂����p���_���ŃG���g���[����Ă���M�����҂����������A�����C�����ł��B�O��A���ׂ��������������A����͉��l�ƁI�Q������Ă��܂����B�Ȃ����������̂ŁA�\�I���͂��܂肨�b�ł��Ȃ������̂�������Ǝc�O�ł����B�������JOE2�͂��킢���I���������ꂢ�ɍ���Ă���܂��B�g�[�i�����g���Ɍ����Ă�������̂ł����A�������X���[�Y�ɓ��삵�܂��B�u�Ђ傢�Ђ傢�v�ƕ����A�Ƃ������炢����ł��傤���c�B���ƁAUE��������Tia.�́A�����͂����Ƃ����������I�����ɂ͂Ȃ��Ȃ��ł��������Ȃ��ł��B
�f�����X�g���[�V����
�Ƃ����킯�Łu�P�ԁv�ł��B�����̂悤�ɂ͂肫���āu�L�[���S�S�S�I�v�B����́A�j����G-Tune��݂��ēo��i�{���͒ނ莅�̗\�肾�����̂����A�Y�ꂽ�̂ŃX�Y���b�L���j�B�����Z���T�Ń����O�ʂ����m���ĕό`������Ƃ����A�N�V�����ŃX�^�[�g���܂����B���A�A��{���\�A�����ăn�f�ڂȂP�W�O�x�^�[���܂ł͂悩�����̂ł����A�{���o��Ȃ��c�B�ǂ������H�o��Ȃ��Ƃ������A�o��O�ɓ|��Ă��܂��B������̃T�[�{�����������B�|��Ă��A�������A�@�\�ƁA�����Z���T�Ɏ�����������Ƃŋ@�̂̌�����ς��邱�Ƃ��ł���̂ŁA����ōă`�������W�B�R��قǂ�����Ƃ���Ŏ��ԃM���c�B�������B��_�����B�f���̔������ł��Ă��Ȃ��B�������{���o��Ă��Ȃ��B�\�I�������c�B
�f�����X�g���[�V������
�Ƃ����킯�ŁA�J�������āA�T�����O����1/4�����O���J���Ă���̂����v����āA�f�����܂���i���ς�炸�A�{��o��O�ɓ|��邯�ǁj�B����AG-Tune�̋@�������߂����ς��A�s�[������悤�ȃf���Ȃ̂ŁA�n�f�ڂȂ������A���\�A�E�P�܂����B�悩�����B��肽�����Ƃ͐����������B�����łȂ�ƁA��B��w�q���[�}�m�C�h�v���W�F�N�g�̖Ԗ삳��Ƒ�����ɁAG-Tune�̃f�������Ă��������āA������G-Tune�������[���Ɍ��Ă��������āA�ƂĂ������ł��B�Ȃ�����������悭�����Ă����悤�Ɏv���܂����A�������Ă�����ł��傤���c�B��ɁA�u�X�ڂ�������낢��b���f���āu�Éꂳ��A�Ԗ삳��͂������v�Ƃ̂��ƂŁB���₢��A�݂Ȃ���A�������ł��B
�����������Ă��邤���ɁA�b�胊�U���g���łĂ��āc�Ȃ�ƁA�u�\�I�ʉ߂���\���v���łĂ��܂����B�Ȃ�ƁA�܂��Q�O�ԑ�ɂ��܂��B�����A����͂��������ǂ��������Ƃ��H�H�H��������ăQ���L���B�i�Q�������[�h���烆���~���V���E�l�����[�h�փ`�F�`���W�I�����A�ǂ��ǂ��͂�͂�B
�����āA�Ō�c�ʂ�܂����A�\�I�B�ǂ����A�Z���T�[������킩��₷������Ă����̂ƁA�Ӓn�ł����{�b�g�ɐG�炸�ɕ��������݂Ă����̂��悩�����̂��B���āA������܂�����Ȃ��Ȃ�܂����B���قفB�ł��A���̓Z���T�[���͂ŁA����L�����Z�����[�h�����悤�B

|
ROBO-ONE�Q��L�`J-Class |
���̂ЂƎ�
8/6�̑����A�Ԃň�C�ɐ��Ɉړ����āA�Ƃ肠�����z�e���ɎԂ�a���ė\��ʂ������I�P�e��Kenji�����ƃC�g�E�����B������Ǝ��Ԃ����������̂ŁA�������ׂ��Ă���S�e�Ŏt���B��ʼnו������������ƍL���āA���C�^�[�B�ƋL�O�B�e���܂����B�т����肵���̂ł����A���C�^�[���āA���\�傫����ł��ˁI���̌�A�}�����g�`�[�������������ɁA����̃}�V���������Ă��炢�܂����B����ς�S���A�Ў����ł����B���A�������B

����A�}�V�[���̃f�L�́A�v�������͊������Ă���̂ŁA�܁A�����͓��ɂ����A���i�R���ցB���i�R���͈ꔭ�Ńp�X�I�����N�����������B
�Ȃ�w����āiJ-Class�͎��R�j�S�\�S�\���Ă���ƁA�����݂��킳���A�����R���������ɗ��Ă��������āA�}�V�������낢�댩���Ă��炢�܂����B�������A�����R����̃}�V�[���E���g����g���C�_�[G1�A�ʐ^�Ƃ�̖Y�ꂽ�`�B���������ꂢ�ɍ���Ă����ł���`�A�T�[�{�̗��W����Ă���܂��B���̌�AKen�����ɂ����������Ă��炢�A���������Ȃ̂ŁA�ʐ^���Ă��܂����B���`��A�������傢���B�������������X�[�p�[���{�b�g���Ă��܂��B


�����������Ă��邤���ɁAZippon��������Ԃ�Łc�B�R�A�̕��A���ł����A����͊����Ƃ̂��ƂŁA�������c�O�ł����B�ȑO�g���Ă����R�A���ڂ�������ɂ��A�T�[�{�̃R�l�N�^�Ƃ��������������Ă��܂��Ă���̂ŁA���ԓI�ɖ������ƌ����Ă����܂����B���̂�����A�y�ʉ������Ă����ɓ������āu�ǂ��܂ŕW���i�ł������H�v�Ƃ����A����������Ă���Ǝv���܂��B
�ȂAJ�^����extL��������������J���Ă���̂��������A�b���Ƃǂ����P�S�̓d���s�����ۂ��i���̂�����A�����킩��̂��Ȃ������āA�o����ς�ł����̂��ȁ`�Ǝv���Ă��܂��j�̂ŁA����f�[�^�f�o�b�O�p�̒P�R�j�b�P�����f��n���܂����B�o����A�d�������ɂȂ�ꍇ�A�P�R���S�{�ɂ��������A�ǂ��S���ē������Ƃ������A�܂��S�{�Ȃ�d�ʂ��Ȃ�Ƃ��Ȃ肻���ł����B�}�W�Șb�AG-Tune�ł��A�P�S���U�{�ł������A�P�R���S�{�ōs�����́A�Y�݂ǂ���ł��B��ŕ������疳���\�I�ʉ߂����͗l�B�悩�����悩�����B�A�N�����̉��H�����ꂢ�ȃ��{�b�g�ł����B�ł�����H�ƌ����Ă܂����B�����������Ƃ���낤�B
�܂��A�}�W���K�AJr.����݂���B�Ƃ����b�ł��܂����B���������Ȃ�ł����A����ρA�`�[���ő�R����������ƁA�Ȃ��Ȃ����������Â炭�āB�����́A���q����Ƃ������������̂ŁA�E�C���o���Đ��������Ă݂܂����B�}�X�^�[�X���[�u�V�X�e���������p���ƂĂ���肵���I�ł��B

�\�I
�\�I�͕��s���Z�ł��B��䂸�A�����O�̐ԃR�[�i�[����R�[�i�[�ցA�R�[�i�[����ԃR�[�i�[�ւƁA�Q��v�����܂��B�����̂͂X�ʂł����B�Ȃ��Ȃ��܂����������Ȃ��ł��B�������B�����ցA�Ȃ�Ȃ����삪������āA������ς���ɂ����\���Ԃ��������Ă��܂��܂����B���̂�����A����ςȂ�Ƃ����Ȃ��Ƃ����܂���B�����[����u�ό`�ł���H�v���N�G�X�g���������̂ŁA�����ňꔭ���܂����i�j�B
�ׂ������ʂ͒u���Ƃ��āA�����������̂����g����g���C�_�[G1�ł��B�����I�Ƃ������A�X���[�Y�I�ł��B����MICRO-MG�œ����Ă��郍�{�b�g�Ƃ͎v���܂���B�����AG-Tune�̕��s���x�́A����ł�����߂Ă��܂������A���̏u�ԁA�����̐��i������Ȃ��������Ƃ�m��܂����B
�S�ʓI�Ɍ��āA���\�n�C���x���ȋC�����܂��B�P��KHR-1�����x���������グ�Ă���Ƃ�������������܂����AKHR-1���o�Ă��邱�Ƃ�z�肵�Ă���̂��A���̎��샍�{�b�g�����l�ɁAKHR-1���Ƀ��x���A�b�v���Ă��܂��B
�g�[�i�����g �����́A�Ȃ�Ɨ\�I�P�ʂ́u���܁[���[�����P�v�ł��BKHR-1�x�[�X�Ɍ����܂����A�Ȃ�ƂȂ��A�����ɂ�KHR-1�x�[�X�̃x�[�X�Ɍ����܂����B
�����́A�Ȃ�Ɨ\�I�P�ʂ́u���܁[���[�����P�v�ł��BKHR-1�x�[�X�Ɍ����܂����A�Ȃ�ƂȂ��A�����ɂ�KHR-1�x�[�X�̃x�[�X�Ɍ����܂����B
�����ɂƂ��āA�g�[�i�����g��́A�܂Ƃ��ɐ키�̂͂��ꂪ���߂Ăł��B�߂��Ⴍ����ْ��c�B�ŏ��A�����|�����ă_�E��������܂������A��́A�����A�����܂���B����̕����T�[�{�p���[������Ƃ��A���J�̃f�L�������Ƃ��A����Ȃ��Ƃ͂܂������������āA�����Ă݂�B���ӂ��B����ς�B�����܂����B�����āA�����O���牟���o���܂����B�Ō�͔���ɂ��ꂱ�̂ł����A�����A����˔j���܂����B
���̂Ƃ��A���̓I�y�~�X�����ł�������ł��B
�Ƃ����킯�ŁA�����܂ŁA�I�y�g���B�ł��A�ǂ����Ă������[�X�p�̃{�^���������̂�Y����ł���ˁ`�B�R�}���h���̓����[�X�p�̃L�[���������Ƀ��[�h�ڍs����ƁA�u�����v�B�^�ǂ��A���̑���̃L�����Z�����Ԃɍ����܂�������ł����A�ْ��̂������A�Ȃ��Ȃ��ł��܂���ł����B
 �����́uCT3�v�ł��B
�����́uCT3�v�ł��B
�r�̃��[���ɃM���[�h���[�^�����A���邭��Ɖ�邱�Ƃ��ł��܂��B������������̂��̂ő�����Ђ�����Ԃ��̂���{�i���p�^�[���̖͗l�B
�Ƃ͂����AG-Tune�̕������Ȃ肵�Ⴊ�߂�̂ŁA����Ȃɂ͋�J���Ȃ��n�Y�c��������ł����A���₢��A�I�y�~�X�����B�������A���B���K�s���������֗��Ăł܂���ł��B����`�A���K�͑厖�ł��B����Ȃ킯�ŁA�Q���O���牟���o�����A���Ǐ��Ă��ł����B
�܁A����Ȃ킯�Ŏc�O�Ȍ��ʂ�������ł����A�g�[�i�����g��͏��߂Ă������̂ŁA���Ȃ肢�낢��ȏ��邱�Ƃ��ł��܂����B�l�l�̐킢�����邾���ł͂킩��Ȃ����Ƃ��đ����ł��ˁ`�B�u�����A�����A�\�I��ʂ�����A���쌩�������ȁ`�v�Ȃ�Ďv���Ȃ���AJ-Class�͏I���܂����B�Ȃ��A���̓��ɂ��Ȃ����������āHJ-Class�̖�́A�\�I�f�������Ȃ��Ă͂����Ȃ���������ł��B�n�C�B�܂��A�I�y�~�X��͑厖�ł��B
�Ƃ����킯�ŁA���킩��w���Ƃ́A
- �I�y�~�X�͕K�����邩��A����v���O�����͎����
- ����f�[�^�́A�U���A�h��A�ړ��̂��ׂĂ��o�����X�悭�z�u���ׂ�
- G-Tune�̍\���Ȃ�A�P�S�E�U�{�ŁA�R���Q�Z�b�g�̓t���ғ��ł���
�ȂǂȂǂł��B

���ꂩ��A���\�A�u���A�z�[���y�[�W���Ă܂���`�v�Ɛ��������Ă���������������A�ƂĂ��u�����킹�`�v�ł����i�j�B�I���W�i���}�C���h������������������Ă��������܂����B���ꂵ�`�B
���������A���g���E�g���C�_�[�E�f�P�̎ʐ^�ł����A�W���ʐ^����蔲�������̂��A�b�v���Ă����܂��B�ق�A��Ƃ��������Ƃ����ł���B���W�R���̕�������Ă�������Ƃ̂��Ƃł������A�����Ƃ͎v���Ȃ��ł��B���Ȃ݂Ƀ}�C�R���́A�P�H�\�t�g���[�N�X�̂��̂�w���C�b�p�C�ɓ��ڂ��Ă��܂����B���������������Ȃ�Ƃ����ł��ˁ`�B
|
�A��܂����B |
 �{���A����ƋA��܂����BROBO-ONE���I����Ă���A���������Ȃ̂łƎv���A�x�m�R�̂���������낤�낵�Ă��܂����B����A���͂Ƃ�����AROBO-ONE�W�҂݂̂Ȃ��܁A�����l�ł����I����́u�䕗�v���̖��������A�����AROBO-ONE�ɍs���Ă��܂����i��S����̎��́A�������J�������̂��o���Ă��܂����H�j�B
�{���A����ƋA��܂����BROBO-ONE���I����Ă���A���������Ȃ̂łƎv���A�x�m�R�̂���������낤�낵�Ă��܂����B����A���͂Ƃ�����AROBO-ONE�W�҂݂̂Ȃ��܁A�����l�ł����I����́u�䕗�v���̖��������A�����AROBO-ONE�ɍs���Ă��܂����i��S����̎��́A�������J�������̂��o���Ă��܂����H�j�B
��G�c��G-Tune�̌��ʕł����c
J-Class�c�\�I�����ʉ߁i�X�ʁj�B�����x�X�g�W�iCT3�ɔs���j�B
ROBO-ONE�c�\�I�M���M���ʉ߁i�R�O�ʁj�B�����x�X�g�P�U�iHAJIME
ROBOT�ɔs���j�B
����������A�C���t���ΐQ�Ă����c���J��Ԃ��Ă��܂��B���`��ꂽ�c�B����Ȃ킯�ŁA�ڂ����b�͂܂���قǂƂ������ƂŁB����́A���ł͂قƂ�ǒ�����Ƃ����Ȃ������̂ŁA��������̕��Ƃ��b�ł��܂����B�܂��A����A���߂āu�g�[�i�����g�ł܂Ƃ��ɐ�����v�̂ŁA�ƂĂ��������ɂȂ�܂����B����Șb�����낢�돑�������ȁ`�Ǝv���Ă��܂��B
�����āA���ւ̃A�v���[�`�͂����������܂�܂����B
����́A�O��ȏ�ɋC���ǂ��A���Ă��܂����B�ƂĂ��ʔ��������ł���B���قفB���ł����X�v���o���Ă̓j���}�����Ă܂�����B�݂Ȃ��܁A�ق�Ƃ����l�ł����I�܂�����������ł��B
�ł͂ł́I
|
���悢�斾�����` |
������ROBO-ONE�AJ-Class
���������B������������`�B�����Q�����B���s���C�}�C�`�����AJ-Class�̗\�I�A�c��邩�ȁ`�B������S�z�����ǁA�܂��܂���蔭���ő�ςł����B�X�P�W���[���������Ă�����ăC���ł��ˁ`�B
SERIAL
COMMANDER�C�}�C�`
�����������u���슴���C�}�C�`���ȁ`�v�Ǝv���Ă��܂������ASIPHA
CORE���̃v���O�������ł��āi�I�C�I�C�j�����Ă݂���A�����C�}�`�C�`�ł����B�둀�삪�ł�ł�B�_�����A�����i�Â��j�B�����炩���K�͂��Ă݂���ł����A����σ_���ł��B����ł͎g���܂���B
���v�B���͖����B���Ԃ͂܂�����I
���̎�
�Ȃ�A�u�v���|����V���A�����M���Ă��܂��`�v�Ƃ������ƂŁA�y�d��ł͂��߂Ă��܂��܂����B��Ɍ����Ă����܂����A��������s���܂����B


���̎ʐ^�́A�������g���Ă���t�^�o�̃v���|�ł��B�����݂�ƁA����Ȓ[�q�����Ă܂��B���́uTRAINER�v���ĂȂ������m�ł����H
����́A�ȒP�Ɍ����ƁA�ʂ̃v���|���炱�̃v���|�𑀍삷�邽�߂̂��̂Ȃ�ł��B�{���̎g�����Ƃ��ẮA���W�R���̐搶�Ɛ��k�̃v���|���P�[�u���Ōq���ł����āA�搶�̃v���|�ő��삵���萶�k�̃v���|�ő��삵���肷�邽�߂̂��̂ł��B
�l�b�g�Œ��ׂ�Ƃ��낢��o�Ă��܂����A���͂Əo�͂������āA�u�����g��H�삳�������ăv���|����M�����o�͂���v���Ƃ��ł��܂��B�M���́A�S�������A�܂Ƃ߂Ĉ�{�ł��āA������}�C�R���ʼn�͂��邱�ƂŁu�v���|����v�ڃ}�C�R���Ɏ�荞�ނ��Ƃ��ł��܂��B
����ȃR�l�N�^�͎����Ă��Ȃ��̂ŁA���ڒ��Ƀn���_�t�����āA�}�C�R���̓d�������łɃv���|�������ĂƉ������āA�v���O�������u������`�v�ō���āc�B
�Ƃ���႟�������I
���܂������܂���ł����B�M�����̂��̂͂T�u��Ȃ�ł����A�ǂ����M�����u�ӂ�ӂ�`�v�Ȋ��������܂��B�g�����W�X�^�����܂��Ƃ��A�V���~�b�g�g���K�ȂǂŐ��`���Ȃ��Ƃ�����������܂���B
�����A���̋@�\�A���ɖʔ������Ȃ̂ŁA�܂��b���A�b�v���܂��B���͂�����܂��̂ŁA���܂������}�C�R������R���g���[���ł���u�W�P�R�}���h���M�@�v�ɂȂ肻���ł��B���̃v���|�̏ꍇ�A���M�@�A��M�@�i�����������^�j���킹�ĂW�O�O�O�~�����܂���̂ŁA����Ƀ}�C�R���{�I���W�i���R���g���[�����v���X������A���\�g���邩������܂���ˁI
����ɁA�v���|�̒��g���āA�Q�^�R���X�e�B�b�N�Ȃ�ł���B������A�o�����ƁA���Ȃ菬�����Ȃ�܂��B
�i�炷�͓̂d�g�@��A�܂������ł��B�悭�݂�ƁA�^���F��̃V�[���̓P�[�X�ɒ����Ă���܂���Łc�j
���̎�E���x���a
�Ƃ����킯�ŁA����Ȃ��Ƃ����낤���ƁA��Ђ̌�y�i���肪�Ƃ��I�j�����Ă������u�t�r�a�W���C�X�e�B�b�N�v���g�����Ƃɂ��܂����B�v���O������g�ނ̂���ςȂ̂ŁAJoyToKey���g�킹�Ă����������Ƃɂ��܂����B����܂��A����Ȃ��Ƃ����낤���ƁA�ȑO�A�������킳���̌f�����悵�ނ炳����������Ă����̂��o���Ă��܂����B����ŃW���C�X�e�B�b�N�̃{�^���ɃL�[�{�[�h�����蓖�ĂāA�V���A���[���\�t�g�ɕ����𑗂�܂��B
�����A�ȒP�I�������A��Ă����W���C�X�e�B�b�N�ł́A�v���|������G�~�����[�g����ɂ̓{�^��������Ȃ��I�u�����L�[�v�A�u���ʃ{�^���U�v�A�u�Z���N�^���{�^���P�v�A�u�w�ʃ{�^���Q�v�ł��B�u�����L�[���Z���^�[�̂Ƃ��ɕ����o�́v�Ƃ����̂��ł��Ȃ��݂����Ȃ̂ŁA�u�����L�[�v�i�v���|�̍��X�e�B�b�N�����j�A�u�w�ʃ{�^���P�v�i���X�e�B�b�N����L�����Z���p�j�Ŏg���Ă��܂��ƁA�c��W�IG-Tune�ɂ͂X�̃��[�h�ƁA���ꂼ��ɂW�̃R�}���h������܂��B���̑̌n���ێ����悤�Ƃ���ƁA�L�[������܂���B
�Ƃ��낪�A����JoyToKey�A�������֗��ȋ@�\�����Ă��āA�{�^���Őݒ肪��ւ������ł��B�܂�A���܂ŁA�uA�v�Ƃ��Ɋ��蓖�ĂĂ����{�^�����A�ݒ�ύX�@�\���g���āuB�v�ɑւ�����ł��B����Ⴗ�炵���I����ŁA�u���ʃ{�^���U�v�ɁA��ʂ�̎g�������ł���悤�ɂȂ�܂��B����ő����₢�܂��B
SIPHA CORE���̕��̃v���O�������A�܂��܂��������n�߂āc
�ӂ�ʂ������A������႟����������
�ł��܂����B����A�p�\�R�����K�v�Ȃ̂���_�ł����A����ł������Ƃɂ��܂��B
���Ȃ݂ɁA�u���̎�E���x���b�v�́A�uWide Studio�Ő�p�\�t�g�����v�ł����B����Ȃɂ����ɂł������Ȃ�ł��傤���H���͂ł��܂��BWideStudio�A���炵���ł��B������ɑI�����Ȃ������̂́A�u���쒆�Ƀ}�V�[������ڂ𗣂��Ă͂����Ȃ��v�A�u���쒆���K���ȃ|�W�V�����ő��c�ł��Ȃ��Ƃ����Ȃ��v�Ƃ����A�}�C���[���̂��߂ł��B����ρA�}�V�[���ƈ�S���̂ő��c���Ȃ��ƁB
�Ƃ����킯�ŁA���낻��ו����܂Ƃ߂悤�B
����ł݂͂Ȃ���A���ł�����܂��傤�`�I
����ɂ��Ă��AROBO-ONE���āA�Ȃ�ł��~�x�݂̑O�Ȃ낤�H�x�݂����ɂ����ł��B
|
�������s�͓�� |
�V�A���S���Y���������Ԑ�c
����AJ-Class�Q��Ƃ������Ƃ������āA���s���x�����P���悤�Ǝv���A�V�A���S���Y���Ƀ`�������W���Ă����̂ł����A�ǂ����Ă����萫������ꂸ�A������߂邱�Ƃɂ��܂����B�Ƃ͂����Ă��A�A���̂܂ܖ������ɂ͂��������Ȃ��̂ŁA����A�b�v���܂��B
�ꌩ�A���ʂ̕��s�ł����A�悭����ƁA�u���𗎂Ƃ��Ă��Ȃ��v���ƂɋC�Â����Ǝv���܂��B�����A����͍��𗎂Ƃ����ɕ��s����A�uSHIN-Walk�v�Ȃ�ʁuSISO-Walk�v�ł��B����A��k�ł��B�����͖̂��O������قǂ̂��̂ł͂���܂���B���́A�r���ڒn���Ă���Ƃ��́A�G���܂������Ȃ����ɕ��s���Ă��܂��B
�܁A����͎���ɂ��邱�Ƃɂ��āA����͏]���Ɠ����A���S���Y���ōs�����Ǝv���܂��B
�]���̃A���S���Y���́c��̓����^���A���S���Y���i���܂肱�������Ă���l�͂��Ȃ��悤�ȋC�����܂����ǁj�ł���Ă��܂��āAG-Tune 2004F�̕��ŃA�b�v���Ă��铮��̂��̂ł��B����������`���[�j���O���Ďg�����Ǝv���܂��B
|
���쒲���ŏI�t�F�C�Y |
��{�̓���쐬����
�X�P�W���[���́A��T���܂ł�SIPHA
CORE�����ۂ̂��ߔ��ɒx��Ă���܂����A�悤�₭�S�Z���i4.8V�j�ł̊�{�I�ȓ���A�U���̏����A���O�R������A�\�I�p����̓�����ȕ����̃e�X�g���I���܂����B
�啨�Ƃ��́A������߃��[�h�ŏ�����������Ă��Ƃ͌�A���邩��U�Z���i7.2V�j�ł̍ŏI�����ɓ����Ă��܂��B �ŋ߂͂���Ȃӂ��ɂ���Ă��܂��B
- �S�Z���i4.8V/�P�R�j�œ�����쐬
�ŏ��͂S�Z�����O�����狟�����ē�����쐬���Ă��܂��B�{�ԗp�o�b�e���͏d��Ƃ��ē��ڂ��Ă��܂��B�S�Z���Ŏn�߂闝�R�͂Q����܂��B
�P�̓T�[�{�ی�ړI�ł��B���n�߂Ƃ����̂͂ǂ����Ă��~�X�������A�T�[�{���b�N�������肷�邱�Ƃ͑��X����܂����A�܂��A�m��Ȃ������Ƀ��b�N�����Ă��āA�C���t������Ă��Ă����Ȃ�Ă��Ƃ��������肵�܂��B
�Q�߂́A�d���������������ł�����ł���悤�ȓ���f�[�^���~��������ł��B - �U�Z���i7.2V/�P�R�j�œ��쒲��
�ÓI�ȓ���͂قƂ�ǂ��̂܂܂œ���ł���̂ł����i�U�Z�����ƁA�����Ƒ�����������Ƃ�����܂����ǁj�A�����̂��铮��͂ǂ����Ă��I�[�o�[�A�N�V�����œ��삵�Ă��܂��A�]�|�����肵�܂��B������A���x�A�w���l�������āA�U�Z���ł�����ł���悤�ɂ��܂��B
G-Tune�̏ꍇ�A����d�������\���Ȃ��̂ŁA�P�S�ł��P�R�ł��A���C�Ȃ����͂���܂�X���͕ς��Ȃ��̂ŁA����ő���̒������I���܂��B - �S�Z���i4.8V/�P�R�j�ōē��쒲��
�u�܂��`�H�v�Ƃ��������ł����A������x�A�ύX����������A�S�Z���œ���m�F�����܂��B�S�Z���ŁA�ǂ����Ă����܂������Ȃ����삪����ꍇ�A�����ł͂�����߂āA�����g�����Ƃɂ��܂��BSIPHA CORE�́A�d���d���ŃX�N���v�g�����W�����v����@�\������̂ŁA�u�d���d���U�u�ȏ�̏ꍇ�̓R���A�����̏ꍇ�̓A���v�݂����ȃX�N���v�g�ɂ��Ĉ�{�����܂��B
���̂�����́A��������\��́uB-Script�v�ł����ƃX�}�[�g�Ȃ����ɂ������Ǝv���Ă��܂��B�uA-Script�v�́uAction Script�v�A�uB-Script�v�́uBrain Script�v�̗��i�d�l�͂܂��閧���āc�킩��₷�����O�ł��ˁB^^;�j�ŁA SIPHA CORE�A����Ɍ����č\�z���蒆�ł��B - �{�Ԏ���
�Ƃ����킯�ŁA�Ō�͂U�Z���P�S�œ��삳���ăe�X�g�ł��B����Ŗ�肪�Ȃ���u�����v�ł��B
�����܂ŏ����Ă��āA���������ƂɋC���t���܂����B
����́c
�uG-Tune�́A�S�Z���ł���ʂ�̓��삪�ł���v
���`��B�A�܂�U�Z�����K�v�Ȃ����Ă��ƁH�H�H ���₢��A�C����蒼���āB���{�b�g����i�ǂ��납���̎�̍H����j�n�߂ĂP�N�̎����������̂����k�ł����A�~�X�̓T�[�{�j���ɂȂ���܂��̂ŐT�d�ɂ���Ă܂��B
�c ����H
���̂܂ɂ����̃z�[���y�[�W���P�N�o���Ă܂����B2003/07/03����n�߂Ă܂����B�����B�������A����N�L�O�̎��́A�o�����Ă������B
�݂Ȃ��܁A����Ƃ���낵�����肢�������܂��B
|
��Y�����I�i���������c�j |
SIPHA CORE
������
����̖�A�T�[�{�o�͒[�q�̕ی��R�����ׂ�1.5K���ɕς��܂����B���ꂩ�琔���Ԉȏ�ғ������Ă��܂����A���̂Ƃ�����͔������Ă��܂���B�������A�Ӓn���ɁA�T�[�{�d������ꂽ�܂܃��Z�b�g����Ȃǂ̑�������Ă݂܂������A���̂Ƃ�����v�ł��B���`�ށA�����T�[�{�ɂ��������̂��ȁ`�B���I�������A�ǐՒ����������Ǝv���܂��B
�Ƃ����킯�ŁA�F�l�A���낢�날�肪�Ƃ��������܂��B�Ȃ�Ƃ��Ȃ肻���ł��B