|
プロポをマイコンで制御・その1 |
メール頂きました。感謝!
AKI-H8/3664の話題がちょっと続いていますが、「違うCPUだけどいくつかあるから次期用にどう?」とか、「手持ちを譲ります」とかメールいただきまして、感謝感激です。本当に、お気遣い感謝します。というわけで、一枚譲っていただくことにしました。というわけで、急にやる気アップで、昨日からプログラムを作っています。いや〜、なんか、「よし、今後もH8/3664でいけるぞ」と思ったら、急にプログラム作りたくなってしまいまして(笑)。さて、どんなプログラムかといいますと…
「H8/3664でプロポを制御するプログラム」
という、非常にヤバそうなプログラムです。電波に絡むものですので、もし、参考にされる場合はそれぞれの判断でお願いいたします。とりあえず、プロポそのものは、いじらずにやっていますので大丈夫かな???と思ってアップしました。
プロポをマイコンで制御 さて、次回ROBO-ONE用に、SISO
LABにて検討中アイテムの1つに、「オリジナルコントローラによる操作」というのがあります。スイッチボードを自作、もしくはゲームコントローラを改造してマイコンを接続し、プロポに入力して電波を飛ばそうという試みです。
さて、次回ROBO-ONE用に、SISO
LABにて検討中アイテムの1つに、「オリジナルコントローラによる操作」というのがあります。スイッチボードを自作、もしくはゲームコントローラを改造してマイコンを接続し、プロポに入力して電波を飛ばそうという試みです。
いや、KONDOの無線コントロールユニットとかにすれば、こんな苦労は要らないのですが、あの受信機、かなり小さいけど、今のG-Tuneにはまだ大きい…。あれ?今、ロボット王国のホームページチェックしてたら、「フリクションスペーサ」がある〜。いつの間に…。
さってと、話、戻りましてと。フタバプロポに限らず、プロポには「トレーナー機能」というものがついています。これは、以前のTOPICでも紹介しましたが、生徒さんとトレーナさんの2台のプロポをケーブルで接続し、トレーナのプロポで生徒さんの操作を行うものです。このSKYSPORT4、良く見ると正面左上に、小さなボタンがついていますが、これを押している間、ケーブルを経由して別のプロポから操作をすることができます。
また、このトレーナ機能、SKYSPORT4(どのプロポもそうみたいですが)では、生徒さん側もトレーナ側もできるようです。つまり、このSKYPORT4からも信号が出力されているはずなので、Trainer端子を適当にあたって、まずは信号解析してみました。ネットでちょっと「トレーナケーブル」なるものを探してみたのですが、うぅ、トレーナケーブル、意外に高価だったので購入をあきらめました(笑)。というわけで、ピンを直接あたることにしました。
トレーナ信号とは??? というわけで、裏蓋開けてにらめっこし…あきらめました。グランドぐらいはわかるのですが…。というわけで、「Google」で「プロポ トレーナ
端子」ぐらいで検索をへろへろっと。おお、ありました。まず端子ですが、左の写真のようになっています。
というわけで、裏蓋開けてにらめっこし…あきらめました。グランドぐらいはわかるのですが…。というわけで、「Google」で「プロポ トレーナ
端子」ぐらいで検索をへろへろっと。おお、ありました。まず端子ですが、左の写真のようになっています。
実は、さっきのGoogle検索で、すでにトレーナ信号を解説されているホームページを発見してしまいました。どうも、ラジコンフライトシミュレータソフトのコントローラとして、プロポをそのまま使用するようです。なるほど。それならラジコンと同じ操作感が得られます。
そんなわけで、きっと、このページを見たみなさんも、既に発見されていると思いますので、信号は、試しに見てみる程度にしたいと思います。というわけで、まずはオシロ(のおもちゃ?)をつないで波形を見てみます。この秋月のペン型オシロ、ちゃちだし少々怪しげですが、結構、役に立ちます(でも、もっといいのがやっぱり欲しい〜)。
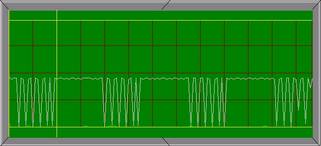
左が「1マス5msec」です。これを見ると、18msecで信号が繰り返されているのがわかります。で、この部分を拡大したのが右側です。「1マス1msec」です。じゃ、試しにスティックを動かしてみます。左スティックを上下してみました。
上にすると、2番目の山が小さくなり、下にすると、2番目の山が大きくなるのがわかります。他も微妙に動いているような気がしますが、実際のところどうなんでしょう…。電圧(HIGH)ですが、上の絵ですと、「1マス2.5V」ですので、4Vをちょっと切るぐらいですが、もう1つ前の写真を見ると、5Vちょっと切るぐらいです。これは、「グランド」を適当につなげたか、しっかりつなげたかで変化が出てまして、「プロポ操作つき」のデータ収集の場合、どうも端子へのあたりがいいかげんになってしまいまして、こういう結果になってしまいました。
ネットで見つけた情報によると、「LOWになっている部分は0.4msec、山はスティック位置が真中で1.1msecあたりで0.6〜1.6msec程度、操作によって変化、最後に、もう1つ0.5〜0.6msec程度の山があって、全体は常に18msec」とありますが、これで確認はできました。また、それぞれのスティックの信号が短い場合、それ以降の信号は前詰になりますが、全体は18msecのままであるということもわかります。
同じプロポ同士でトレーナ機能が使えるならば、これと同じ信号を、トレーナの入力端子に入れれば動作できるはずです。
どれがどれ?
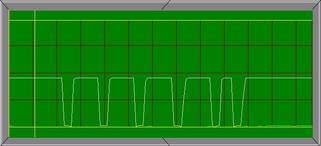
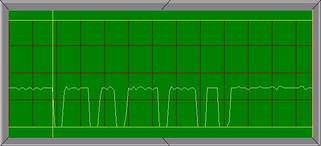
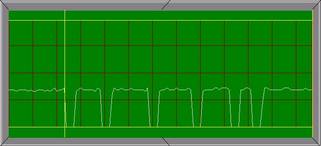
先ほどの調子で、スティックを1つずつ動かして波形を調べてみたら、次のような結果になりました。
- 1つめの信号 右スティックの横方向
- 2つめの信号 左スティックの縦方向
- 3つめの信号 右スティックの縦方向
- 4つめの信号 左スティックの横方向
というわけで、明日はテストプログラムの解説をしたいと思います。
ところで、ONOさ〜ん、また電脳壁新聞、見当たらないんですが…うちだけでしょうか?
追記)うふっ。見つけました。ONOの電脳壁新聞!
|
消しゴム付きAKI-H8/3664について |
ハードウェアマニュアルによると
消しゴム付きAKI-H8/3664に搭載されているH8/3664Nだと「I/Oがちょっと足りないかな…」についてのフォロー情報ですが、ハードウェアマニュアルの端子機能のページを読むと、ポート5について、「(H8/3664NはP55〜P50)」という表記と、「(H8/3664Nは、6ビットの入出力ポートです)」という表記があります。というわけで、P56とP57(I2C)は、専用になっているのかな〜と理解しています。今のところ、内臓のEEPROMを切り離す機能も見つけていないので、そう判断しています。
そんなわけで、SIPHA COREの場合、すべてソフトドライブなため「I/Oが足りない〜」に至ります。さて、今後のプランですが、自作コントローラは、OAKS16MINIで行って、COREの方は今までどおりH8/3664か、パワーアップでH8/3694Fで行こうかなって思ってます。OAKS16MINIの方も、あれからいろいろメカデザインを考えていたんですが、載らないことはないかな〜って感じでして、ひょろっと気が変わる可能性もありです (^ ^;。
|
う〜ん、AKI-H8/3664 |
次期SIPHA
COREのマイコン
本日帰国。あ〜疲れました。さてと、秋月電子のホームページをチェック。G-Tuneに使用しているAKI-H8/3664ですが、なかなか入荷しませんね〜。というわけで、非常に悩んでいます。今、手元にはSIPHA
COREに実装しているものと、予備が2枚はあるんですが、既に結構使い込んでいるやつですし、次は操作コントローラを自作でマイコン仕込もうと思っていますので、そうすると、予備が1枚しかない状態になってしまいます。あ〜、悩ましい。期待のOAKS16-MINIは、今のG-Tuneの形状では載せられないし(ちょっと長すぎ)、消しゴム付きはI/O点数が苦しいです。載せれそうなサイズのもので、同クラスのものというと…
Best TechnorogyのBTC064 H8-3694F、BTC067 ATmega32(ちょっとI/Oが少ないかな…)、そしてストロベリーリナックスのH8TINY(3694F)。お、そういえば、ストロベリーリナックスのマイコンって、10月末まで\1780ですね…。う〜ん、いいな〜、いいな〜。入荷すると信じてAKI-H8/3664を待つか、ストロベリーリナックスのTINYを購入するか…う〜ん、悩む悩む。
|
最近悩んでいること・足首パーツ設計 |
新足裏サイズのために…
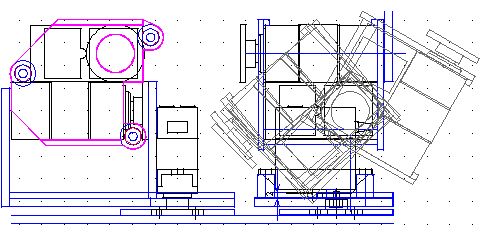
うぅ、なんか仕事の方が忙しくて、まとまった時間が取れないです…。今週は、お持ち帰りでドキュメント作ってたりします。そんなわけで、大きな事はせず、CADで設計しています。
実は、G-Tune、直立したときの前後方向の重心が後ろにありまして、それを、立ち位置の場合、やや前傾させてバランスをとっています。また、しゃがみ時も、モモ−ヒザ、ヒザー足首のピッチ間は同じ(50mm)なため、やや後ろに重心がきてしまいます。それに加えて、足首のピッチ位置が、強度的な中心よりも後ろにあり、どうしても前後に揺れやすくなっているのが欠点です。
そんなわけで、新足裏で今より小さくなると、かなりやばいんで再設計しています。稼動範囲とかは、上の図のように、二次元CAD上でチェックしてます。部品一塊をグループ化しておいて、それをくるくる回しながら目視チェックです(笑)。慣れてくると、頭がやわらかくなるかも。というわけで、今日もLilliCad万歳!
|
ちょっと大きな買い物 |
ROBO-ONEネタというわけではないんですが… うひょ〜、今日は台風のおかげですごい風と雨…。仕事、早めに引けてきました。みなさん、大丈夫でしょうか?
うひょ〜、今日は台風のおかげですごい風と雨…。仕事、早めに引けてきました。みなさん、大丈夫でしょうか?
さてさて、ロボットネタではないんですが、オーダーしていたパソコンが昨日届きまして、現在セットアップ中です。購入したのはSHARP MURAMASA。CDドライブも無いしHDDは20Gなんですが、コンパクトでいいですね〜。いろいろサポートしてくれている妻へのプレゼントということで、妻用PCです。そんなわけで、機種も妻の趣味に合わせてこれになりました(でも、きっとROBO-ONEの時とか、これ持っていくんだろな〜)。
現物を見れば見るほど薄くていいですね〜。これなら、いつもロボット運んでいるケースに、G-Tune、ラジコンプロポ、充電器、少々の工具と一緒に入りそうです(おいおい)。
ちなみに、ケースは、ホームセンターで買った、\2980の工具箱です。以前は、もっと工具箱した形状のものを使っていたのですが、運びにくいので現在はこのようなアタッシュケースタイプのものを使っています。


こうやって写真を撮ってみるとさみしいので、ケースになにかステッカ作って貼ろうかな〜。
|
こんなサーボが欲しい… |
カンファレンスのフォローネタ
ちょっとカンファレンスネタですいません。G-Tuneの発表の最後に、「変形専用サーボが欲しい」なんて言っちゃったりなんかしたんですが(他にも、あの無線シリアル受信機がもっと小さかったら…軽量プレーン用のR/C受信機ぐらいだったら絶対買うのに〜なんてことも言いました…)、具体的にどのようなモノをイメージしているかというと…
- 稼動範囲
ぜひとも270度以上、動作して欲しいです。 そうすれば、人間の稼動範囲を越えて考えれるので、いろいろ、変形パターンも考えられるのではないかと。実際にロボットに実装するのは、270度が数個、後は180度動作すればOK!という感じになると思いますので、オプションでもいいかも。 - 形状
今のサーボって、基本的に横から見たら正方形ですよね? 長方形の方が、ヒューマノイドにレイアウトしやすい気がしませんか?たぶん、だいたいが40x40x20だと思うんですが、できれば、40x30x25とかの方が使いやすい気がします。 - 片持ち可能
これができるとありがたいです。
こういうサーボって、変形に限らず、普通にロボットを作っても作りやすい気がするのですが、いかがでしょうか?でも、これって、ROBOTISのアレが近い???う〜ん、でも、お値段の方が…。あんな形状で、もっと小ぶりで(中身、MICRO-MGとかKRS-784ICSとか)、値段もそれ相応というのがいいんですが、いかがでしょう???
|
新足裏 |
新足裏・縦50%横30%(予定)
カンファレンスの中で、次の足裏サイズについての話がありましたが、一番心配な、「ウィング風のものが表現できるか?」というところについて考えてみました。というわけで、今の足裏に、新ルール予定のサイズの四角を足してみました(G-Tuneの足裏は、規定より少し小さいです)。
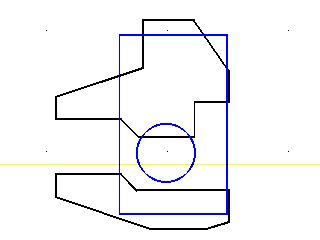
ふむふむ。だいぶ小さくなりますね…。どどど、どうしようかな〜。意外と長さがありますので、形状は、斜めカットとかすれば、ウィングイメージに近づけれそうです。
しかし、横幅サイズ(上図では、左右方向)が小さい…。う〜ん、どうしようかな〜。このまま回転させてもイマイチな感じです。現在、90度足裏を捻ってウィング状にしていますが、足首の裏側のデザインも、少し大きめにして、90度捻ると、足首側のパーツが外から見せて、全体でそれっぽい形状に見えるとかにしてみようかな〜。
|
カンファレンス行ってきました。 |
カンファレンス行ってきました。いや〜、楽しかったです。いろんな方とお話できまして、こちらから説明するだけでなく、みなさんからもいろいろ教えていただきまして、よかったです。関東の方がうらやましいです…。
ROBO-ONEに参加されている方の話も、もちろんすごく参考になる話だったのですが、森山さんのお話、大変、興味深いといいますか、ぐぐっと来るものでした。内容は…ここで説明しきれないと、申し訳ないので、今の気持ちを書いてしまいます。ロボット作りは難しい。でも、それだけに、楽しい。見ていてくれる人が笑ってくれたり、驚いてくれると、もっと楽しい。軽快に戦えれば気持ちがいい。うまくいかなくて悔しい時もあるけど、これからも、どんどん楽しいことしていこう。そんな気持ちです。
また、ROBO-ONEの時と違ってリラックスできるので、本当に楽しく、みなさんとお話できました。そうそう、次回、ROBO-ONEの話も少しありました。内容は、記憶がイマイチあいまいなので、きっとどなたかがアップしてくださることを期待します。あ、近々、正式に発表があるようです。
ところで、ONOさんのとこにアクセスすると、なぜか本家の方に行ってしまう(さらに「ロボット」とか掲示板の方へすすめない…)んですが、どうしたんでしょう?うちだけかな…。
|
「MICRO-MGのウンチク」で間違い発見…すいません。 |
ぼちぼち「不定期TOPIC」を月一整理しようかな〜と思って読み直していたら、また間違いを発見しました。誠に申し訳ないです。
- サーボケースのネジを締めすぎると…
真中のケースが変形してくることがあります。ケースそのものは丈夫なのですが、なぜでしょう?締め込んでいるうちに、ふにゃ?という感触が…。締めすぎには注意しましょう。
のところですが、「真中のケース」ではなく「一番上のケース」です。さらにいうと、ファイナルギア側の方のネジが「ふにゃっ」っと行きます。実はその理由もわかってしまいました。掲示板の方で、hiroさんというずみかわさんと、MICRO-MGにどうやって反対軸をつけるか?という話をしていたのですが、その時に、サーボケースをひっくり返したり寸法や穴径をチェックしていました。そしたら「およよ〜?貫通穴、ここだけ完全筒状になってないよ〜」というのを発見してしまいました。ギアのスペースを確保するためのようです。本当は写真をアップしたいのですが、デジカメが手元に無いので、後日ということで。
というわけで、こんな感じの説明になります。
- サーボケースのネジを締めすぎると…
一番上のケースが変形してくることがあります。ファイナルギア側のネジ受けの部分が「ふにゃっ」っとなりやすいのですが、実は、ファイナルギア側のネジ貫通穴は完全な筒状になっておらず、ケース内部では「C」の断面になっています。そのため、締めすぎには注意しましょう。
2004/09/30のTOPICも修正しました。^ ^;;;
明日はカンファレンスだ〜。楽しみ!朝から会場にいるつもりですので、いろいろお話できるといいですね。
|
WideStudioでのデバッグ |
久しぶりの更新です。例によって出張していまして…。日本は涼しいです。ちょっと風邪気味。 さて、今日は超久しぶりのWideStudioネタです。
最近、SIPHA TERMの改良を始めました。久しぶりに触るので半分忘れかけていますが、開発時、急いで作っていたため、いろいろアップできなかった情報があることを思い出しました。そんなわけで、ぼちぼちと思い出しがてら、小技みたいなものをアップしていこうと思います。
WideStudioでTRACE表示
みなさん、WideStudioでデバッグする時、どのようにされていますか?WideStudioにはgdbというデバッガがあるのですが、使い方がよくわからなくて、もっぱらトレース表示を使用しています。
WideStudioには、WSGFtrace( WSCstring )という、グローバル宣言されている関数がありまして、これを呼び出すと、TRACEウィンドウに文字列を表示してくれます。
TRACEウィンドウの出し方ですが、プログラム実行時に「ビルド」−「トレース実行」とすることによりTRACEというウィンドウが開きます。自分でWSGFtrace()を埋め込まなくても、ウィンドウにはアプリケーションビルダで設定したイベントがずらずらと表示されるようになっています。そういうわけで、最初からTRACE表示をさせておくと見づらいので、ここぞ!という時に、「start」を押します。そうすると、イベントとともに、WSGFtrace()で設定した文字列が表示されます。
では、どうやって実装するかやってみます。
サンプルプログラムの作成とトレースウィンドウの表示
まずは、今回の実験台となるプログラムを作ります。適当にウィンドウが1つあるだけのプログラムを作ってみてください。プロジェクトを作って、新規ウィンドウを追加しただけのものです。
これに、マウス押下イベント処理を追加してみます。「プロシージャ」で、「プロシージャの追加」をします。
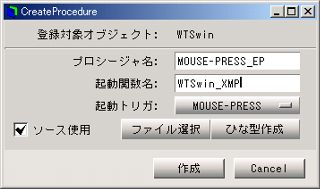
マウス押下イベントは、「MOUSE-PRESS」という起動トリガになります。名前は適当ですが、いつもこんな感じでつけています。MOUSE-PRESSだから「XMP」、もしACTIVATEだったら「XAC」なんてのを後ろにつけています。ちなみに「X」は「実行(Execution)」ということでつけています。
これで「作成」を押したら、そのまま「ビルドオール」してください。で、ここからがミソ。プログラムを実行するときに、「トレース実行」を選択します。
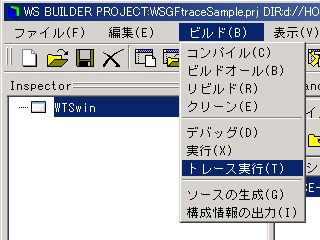
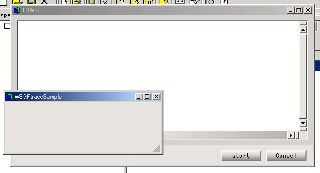
これです。これで実行すると、トレースウィンドウ付きでプログラムが実行されます。そして、実行すると、次のような状態になります。ちょっと見づらいですが、左下にあるのが今回作ったウィンドウで、後ろにでっかくでているのがトレースウィンドウです。「start」と「cancel」ボタン(なぜに小文字?)が右下にあるのがわかると思います。
それでは、さっそく、実感してみましょ。「start」を押してマウスで、プログラムで作ったウィンドウの方をクリックしてみると…
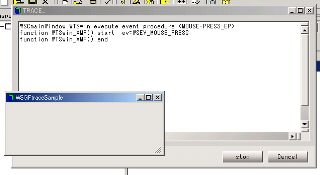
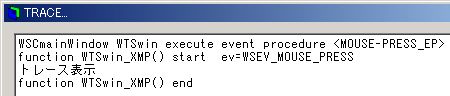
お、何か表示されましたね!ちょっと上の画面では見づらいので、拡大したものを下に載せます。

はい、こんな感じで表示されています。なになに?WTSwin(今回作ったウィンドウ)が<マウス押下>イベントプロシージャ−を実行して、スタートしてエンドですか、ふむふむ。
このように、TRACEウィンドウでは、イベントプロシージャの実行状態などが表示されます。で、ここが本題ですが、このウィンドウにはプログラムからも表示をさせることができます。それが、先に書きました、WSGFtrace()です。
WSGFtrace()でTRACEウィンドウに表示
というわけで、プログラムからこのTRACEウィンドウに文字列を表示してみます。先ほど追加したプロシージャに、WSGFtrace()を追加してみます。プログラムは、こんな感じになります。
//----------------------------------------------------------
//Function for the event procedure
//----------------------------------------------------------
void WTSwin_XMP(WSCbase* object){
// WSGFtrace()による、直接表示
WSGFtrace( "トレース表示\n" );
}
|
WSGFtrace()の引数は、WSCstringで宣言されていますが、このように文字列を渡しても大丈夫です。のあたりは、C++のOperator演算子がどうたらこうたらのような話だったと思いますので省略します(単に説明できるほど詳しくないだけ…)。では、さっそく「ビルドオール」して、「トレース実行」してみてください。「start」を押すのも忘れないで下さいね。
3行目に、無事、「トレース表示」と表示されています。こんな感じでTRACEウィンドウに文字列を表示します。例えば、内部処理でのちょっとした結果の表示などに使えます。また、WSGFtrace()は、TRACEウィンドウが無ければ、何も動作しないようになっていますので、不要になったからといって削除する必要は無く、そのまま埋め込んでおいても大丈夫です。
もっと便利にTRACE表示
でも、ちょっと不便だと思いませんか?やっぱ、「printfデバッグ」という言葉があるように(いい言葉かどうかはちょっと…)、printfのように使えるものが欲しいですね!そんなあなたにこんな関数はどうでしょ?(最初、TRACE()にしようと思ったんですが、Visual
C++でも、同じ名前のものがありますし、WideStudioの中でも近そうなものがあったので、あえてやめました)
//----------------------------------------------------------
// TRACEウィンドウへの書式付表示
// 引数 const char * 書式(表示文字列)
// [, argument]... 表示引数
// (printfと同様)
//----------------------------------------------------------
void tracePrintf( char* szForm, ... )
{
char szData[128];
va_list vaParam;
va_start( vaParam, szForm );
vsprintf( szData, szForm, vaParam );
WSGFtrace( szData );
va_end( vaParam );
}
|
とりあえずテストということで、先ほどのイベントプロシージャ実行関数のソースファイルに書き込んじゃってください。また、va_listとかがわからない方は、いわゆるCの標準関数ですので、がんばって調べてみてください。
//----------------------------------------------------------
//Function for the event procedure
//----------------------------------------------------------
void WTSwin_XMP(WSCbase* object){
// WSGFtrace()による、直接表示
WSGFtrace( "トレース表示\n" );
// tracePrintf()による書式付表示
tracePrintf( "トレース表示 %d %d %d %s\n", 1, 2, 3, "TEST" );
}
|
じゃ、「ビルドオール」して「トレース実行」してみましょ。
おお、ちゃんと出ました。これでprintf()と同じイメージで使えます。便利ですので、お試しくださいな。また、もし、もっといいデバッグ方法を知っていらっしゃる方がいましたら、ぜひ教えてください。
|
G-Tuneの腕折れた… |
肉抜き穴からぺきっと…


今日まで問題なかったということを考えると、それはそれで正解な気がするのですが、やはり、メンテナンスをしなくて済むに越したことが無いので、どういう風に作るのがいいのか、折れた部品を眺めて考えてみました。う〜ん、ここに穴をあけるのはまずかったかな…。
- サーボと一緒に止める部分は、サーボの強度によって補強が入るので強度は少なめでよい(右側の太い方が、サーボと共締めするところです)。
- 強度のある部分と、無い部分の境目付近が、最も力がかかる。
- 力は、テコのようにかかるので、腕の場合、先端の方は強度少な目でよいが、根元の方は強度が必要となる。
全体的にしなっている時は折れないんですが、それが集中するとやっぱ折れますね〜。よって、力がかかる部分を考えて、うまく全体がしなるようにバランスを考えて肉抜きを考える必要があるってことですね。というわけで、強度の境目は、丈夫に、逆に、手の先端の方は肉抜き多めでも構わないという感じでしょうか。
今度は、この部分の肉抜きを少なめにするか、補強のアクリル棒を長めにするか、接着方法を考え直すかした方が良さそうです。
実は、Zipponさんから頂いた秘密の補強部品があるのですが、これは最後の奥の手として取っておこうと思います。ふっふっふ。
|
初めて買ってみたもの |
MICRO-MG情報追加
昨日のMICRO-MGのウンチクに、1.5kΩの保護抵抗の話を追加しました。チェックしてくださいね!
ところで、いつもお世話になっている、ONOさんところの「0N0の電脳壁新聞」に、本家があることを、今日、初めて知りました。いや〜、びっくりです。あれがドリーム仮面なんですね!すごい得した気分です。でも、ONOさんって、一体…。
A5052
 Fさんところ(夢現工房)で、ABSをオーダーした時に、なぜかセールをやっていたので、ついつい、オーダーしてしまったA5052。考えてみると、アルミの板材、初めて購入しました。二足歩行ロボットやっているメンバーの中では、非常に珍しいのではないかと。アルミって、どんなものか、全然知らないので、研究用に買いました。
Fさんところ(夢現工房)で、ABSをオーダーした時に、なぜかセールをやっていたので、ついつい、オーダーしてしまったA5052。考えてみると、アルミの板材、初めて購入しました。二足歩行ロボットやっているメンバーの中では、非常に珍しいのではないかと。アルミって、どんなものか、全然知らないので、研究用に買いました。
研究用ということで、何に使うとか、全く予定は無いんですが、ついつい購入…そうだ、充電器&放電器のケース作ろうかなぁ〜・(A5052でとても丈夫 ^ ^; )。
ABSの方は、G-Tuneのマイナーバージョンアップ用です。いつも、白、黒、2mm、3mm、それぞれ1〜2枚ずつストックするようにしているのですが、最近は、白の方がよく減ります。というのも、黒は小さいパーツが多いので、部分的に、「あ、とちった!」と思って作り直してもあまり減らないんですが、白は、面積の大きいパーツが多いので、減りが早いようです。
そういえば、中秋の名月…
思い立ったが吉日の最近の行動を見て思い出しました。そういえば、9月28日、うちではこんなことしました。外でバーベキューです。天候の方は、風がやや強いぐらいで、月も結構みえてました。


ところで、みなさま。「炭火を起こす」のは、バーナーを使うと手軽ですが、このときって、お父さん(とか、カレシとか)の見せ所って感じしません?というわけで、SISO流、バーナーや着火剤を使わずに、スマートに火を起こすコツを書いてしまいます。
- 備長炭より、普通の炭の火がつけやすいので、こっそり、あえて普通の炭を買ってきます。
(備長炭を使う場合は、普通の炭も少しあるといいです。普通の炭から火をつけます。) - 着火剤は、カッコつけるために、あえて買いません。
- 割り箸を用意します(4〜5膳ぐらいかな)
- 新聞は1枚の半分〜3/4ぐらいを、さらに4枚以上に破り、軽く丸めます。
新聞は、あまり多いと、あとでうちわで扇いだ時に灰が舞うので、美しくありません。 - 丸めた新聞を寄せ集めて、小さな山にします。新聞は、あまり固くまるめないこと。
- 割り箸を割り、それを半分に折り(つながった状態で)ます。
- 先の新聞の上にかぶせるようにのせます(中途半端に折ってあるので簡単ですよ)。
- 炭を数個、小さく割ります。結構硬いので、軍手をはめて、石とか、トンカチで割ります。それを割り箸の上に、さらにかぶせるように載せます。
あんまり沢山細かくすると、後で温度が上がりすぎて、肉の焼き加減に影響しますので、2〜3個程度を軽くバラスのがいいです。 - 新聞に火をつけます。
- 割り箸に火が移るように、軽く扇ぎます。灰が舞わない程度に。
- 新聞紙が燃え尽きた頃に、割り箸が燃えているはずです。この状態でハタハタと扇いでいけば、炭にどんどん火が移っていきます。
- 後は、大きな炭を入れて、余裕の雰囲気で扇ぎましょう。あまりにもスムーズに火がついて、誰も驚かないかもしれません。T_T
注意!バーベキューが終わった後に、使い終わった割り箸を「次回の着火のために」と回収すると、感心されるかもしれませんが、ウケはよくないかも…。
それでは、最後にみんなで…
レッツ・バーニング!
ああ、すいません…「これがオチか〜」と言われそう…。でも、宮田さん活動再開、うれし〜。
ポイントなんですが、「火が移る」というのは、「炎」が当たることも大事なんですが、まず、炭の温度が上がっていることが大事です。そのため、割り箸がゴオゴオと燃えていなくても、赤く熱を発していれば、炭をのせて扇ぐと火がつきますよ。あせらずに加減を見ながら、また、極力、灰を飛ばさないように扇ぎましょう。
上記のポイントを押さえれば、必死に扇がなくてもいけると思います。