|
じっと画面をミル… |
う〜ん
復活させたデータのチェック。
ソースを開くと「未確認言語」…。テストプログラムなどは何処へ?ツールで開けなくなっているファイル多数。CADデータも、ぬけぬけ。まだ、チェックしておきたいファイルは沢山あるのですが、とりあえず、当面、すぐに必要なファイルはチェック完了です。
それにしても、意外に残っていてびっくりです。 全体で、3週間の遅れぐらいでなんとかなりそう。煮つめる時間は取れなくなりそうですが、次回ROBO-ONE参加はいけそうです。よかったよかった。
|
無くしてから気づくもの |
外付けHDDをコツンってね。ははは。
ロボットのデータとかは外付けHDDに入れているんですが、なんか「コツン」ってぶつけちゃったんです。いや「ゴツン」だったかも…。で、パソコンにつないでみたら「ふぃぃぃん、かしっ、ふぃぃぃん、かしっ」という、数年に一度ぐらい耳にする音が聞こえてきて、「ふ、USB電源容量が足りないだけさ」と強がって電源つないでみても、パソコンの画面が青くなって、ついでに自分の顔も青くなって…。逝ってました。でも、バックアップもあるから大丈夫さ!と思ってパソコンのHDDをチェックしたら…
「あれ、ない???」
数日前はあったはずなんですが…。
CADデータも、プログラムも、ぜ〜んぶ、ない。
というわけで、外付けHDDの方はあきらめて、復元というすばらしいツールを使ってパソコン側のデータを復旧開始。う〜む、日数がたっているだけあって苦しいですが、なぜかプログラムは最新のものだけ残っていて、これが復旧率70%ぐらい。ま、足りない分は、またコードばしばし書けばいいのでよしとします。CADデータは、先週ぐらいのがでてきました。部品集みたいなのは残っているのでなんとかなるでしょう。。どうでもいいデータは、意外に残ってたり。また、ファイルは戻ってきても、データがつぶれているのがあるので、さあというときにびっくりするかも、という感じです。
はぁぁぁ。かなり痛いですが、なんとかなりそうかな?顔色も通常に戻ってきました。Librettoに引越しがてら、いろいろ整理しちゃおうっと。
|
Libretto L1 |
Libretto L1/060TNMM 友人から、安くLibretto
L1を譲ってもらいました。ちょっと持ち歩いてプログラム作ったりするにはちょうどいいかな〜と思いまして。
友人から、安くLibretto
L1を譲ってもらいました。ちょっと持ち歩いてプログラム作ったりするにはちょうどいいかな〜と思いまして。
さて、さっそく、Windows2000化。このパソコンは、CD-ROMドライブが無いので、まずは友人からついでに借りてきたCD-ROMドライブでやってみると、すいすい〜とインストール完了。アプリケーションCDの方に、Windows2000用のドライバとかも入ってます(東芝のホームページにも持ちろんあります)。
さて次は…先に言っておくと、はまりました。今度は、クラッシュした時のことを考えて、手持ちの外付けドライブ(PanasonicのUSB接続マルチドライブ、LF-P567C)でインストールにチャレンジ。う〜ん、認識しないです。あれこれしたり、Windows2000のセットアップディスクを作って、ちょっといじってみたり(どっかでそういう記事を見たことがありまして)してみたものの、ダメ。そんなわけで、リカバリ用のCDだけ作って、ディスク交換するときにはまた友人から借りることにします。
結局、朝からやってたんですが、進みが無くて妙に疲れました。ダメ押しで、いつも使っている外付けのUSBバスドライブのハードディスクが回らない…。ちょっと力不足な感じです。こっちは今度電源つけることにします。
でも、USB CD-ROMドライブとはいえ、Windows 2000の標準ドライバで動作するんだから、セットアップディスクから起動した時ぐらい、動いてもいいんじゃない〜?ま、ぼちぼちとやることにします。
そんなこんなで、コンパイラなどのインストールもまだできていないんですが、結構、いいですね〜。キーボード打ちやすいし。画面が横長(1280x600)なので、ちょっと妙な感じですが、慣れだと思いますし。うん、いい買い物しました。
|
引き続き新腕設計完了 |
脚に比べると腕は簡単。何しろ…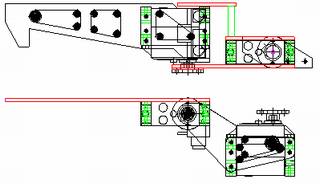 腕の方も完了です。腕は、「MICRO-MGジョイントパーツ」を使ってあっさりと仕上げる予定です。うぅ、これがあると、設計がすごい簡単です。サーボを板にくっつけるのに、全然悩まなくてもいいですね〜。うむうむ、思惑通り。
腕の方も完了です。腕は、「MICRO-MGジョイントパーツ」を使ってあっさりと仕上げる予定です。うぅ、これがあると、設計がすごい簡単です。サーボを板にくっつけるのに、全然悩まなくてもいいですね〜。うむうむ、思惑通り。
ABSでロボットを作る場合、アルミと違って「曲げ」で直角を出せないので、接着、もしくは何らかのパーツでネジ止めしていくことになるのですが、これがあれば、CAD図面のように楽勝です。
さてさて、今回の設計ポイントですが、肘を後ろに下げたことです。G-Tuneは、腕は2軸だけで構成されているため、肘を曲げると、長い腕がどうしても前方に飛び出してしまいます(肩のピッチ軸が無いので、引っ込められない)。肘をぐっと曲げられればいいのですが、起き上がりのことも考えると、後ろ方向に60度程度の動作範囲を持たせる必要がありますので、肘そのものを後ろに下げてみました。「腕の絶対長は減らさずに曲げた時にコンパクトにしたかった」という意図で設計しています。しゃがんでいる時は、腕が結構邪魔で、相手に引っ掛けられたりするので、こうしてみました。
また、少しだけ肩〜肘間の距離を短くしました。これはアクロバットな動きをやりやすくするためです。作って動かしてみるとわかるのですが、まとまりのいい長さというのがありまして、これで前転速度の安定化ができます。G-Tune 2004FIの前転動画をよく見るとわかるのですが、腕を地面につけたときに若干の跳ね返りがありまして、動作データ作る時にこれを吸収するのに苦労してました。
後は…Zipponさんから以前頂いた、あるものを使って腕を強化します。組み上げた時に、写真をアップしますのでお楽しみに!
|
えいやくぅぅ、エイヤ苦うぅ、うぅ。 |
英訳+αしてみました。
GWSへの要望の件、英訳してみました。あと、1アイテム、「270度まで動くとうれしい」というのも追加。それにしても自信の持てない英語です。きっと、うん年後には、じゃぱにーずいんぐりっしゅが世界で幅を利かせるかもしれないので、まあ良しとします。サーボのミミなんて、なんて訳したらいいのかわからなくて、いろいろな書き方にしてみたんですが…(フレームとくっつける端っこのやつとか…)。もし、いい英語ご存知の方いましたら、ヘルプ〜です。いっそ、日本語で漢字を多めに書いておいた方が、伝わるかな(笑)。いいや、ロバート、後は頼んだ〜。
- Improvement Servo in Same Price Range
- MICRO-MG
- Accuracy up of Position Sensing.
MICRO-MG has a gap between Final Gear and Potentiometer.It makes a margin of error about 2 degree. - Low Backlash.
MICRO-MG has backlash that is bigger than other servo. - Small, Strong Circular form and Low-Height Servo
Horn.
Diameter under 20mm. This is important parts for assembling frame. Circular shapes can disperse stress and keep high strength. - Long Cable (30cm).
Robot needs long cable because it has many servos and layout is very different from Air Plane, Car and Ship. - Flat Shape on Bottom Side.
The bottom side is not flat for Motor. It makes difficulty for assembling frame. - More Straight Shape.
Casing’s shape has small bulge that is little big than other servo.
- Accuracy up of Position Sensing.
- S03T
- Strong Plastic Gear
The 3rd Gear (count from Final) is broken when load is max.
S03T keeps light weight by Strong Plastic Gear. It give us high performance weight and power ratio. - Mount a motor on casing more strongly.
- Strong Plastic Gear
- Common
- Casing design for handling frame.
- MICRO-MG: Fitting M2 Screw and 2 holes (total 4).
- S03T: Fitting M3 Screw.
- Both: No cut hole.
- Easy removing adhesive for control board.
Hobbyists remove adhesive when they exchange cable. - Same Design Horn Gear spline as other maker.
Already, some maker line-ups after parts for robot. If it is same design then hobbies can use it.
- Casing design for handling frame.
- Optional Parts
- Bottom Side Axial Casing.
Most of robot is assemble by top side and bottom side to frame. - Small, Strong Circular form and Low-Height Servo Horn.
- Discount pack (10 or 12 servos)
One robot needs over 20 servos. E.g.) 10 or 12 Pack. - Line-up of the servo whose grade is a little higher than
MICRO-MG and S03T with a little hither prices.
For example, Knee servo needs high speed than other servos. Ankle servo needs power than other servos. - Optional Parts for MICRO-MG
- High Speed Gear, High Torque Gear.
- High Power Motor. (e.g. Coreless Motor)
- Bottom Side Axial Casing.
- MICRO-MG
- Arranged Servo for Robot
- Electronics
- Digital Controlled Servo.
Digital Controlling produce good holding power, exact operation and some additional function. (Power reduction)
- Digital Controlled Servo.
- Casing
- Screw for casing from bottom.
Bottom side is flat. So, it’s convenient to assemble frame. - 4 Screw for assemble casing.
Regarding MICRO-MG, 4 Screw for assemble casing is more convenient for build up robot. And, please keep height. The width may grow big. - Metal Bush for gears.
Axial holder for gears are weak point in high stress. The metal bush makes long life and stability.
- Screw for casing from bottom.
- Other Item
- No included Rubber Bush and Screw for wood.
- Electronics
- Other Ideas
- Casing Idea for Exclusive Robot Servo
- Additional Screw Hole for Holding Flame.
e.g.) Center of casing change to metal (e.g. aluminum) and add hole for screw (e.g. M1.6). - Built connector on Servo Body with cable supporter.
- Function for reading value of potentiometer. (e.g. Analog Output)
- Slim Designed Case for Robot.
- Double edge for handling frame. (Top and bottom)
- Electric Parts Idea for Exclusive Robot Servo
- Failsafe for Controller. (DC Power doesn't flow into signal line when servo control board is broken.)
- Overload Limiter for electric current.
- No-assembled Cable and Connector.
- Supporting wide operation range. (270 Degree)
- Related Robot Products Idea
- 2 Axial Gyro (No need input signal)
- Double Axial Servo.
- Additional Screw Hole for Holding Flame.
- Casing Idea for Exclusive Robot Servo
|
ようやく新脚設計完了 |
次期G-Tuneもちゃんと設計中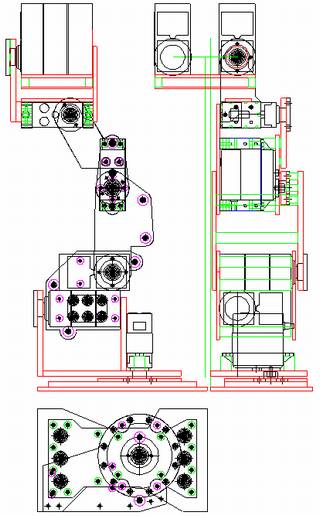 ようやく脚の設計が終わりました。少々見づらいですが、片足分の全貌です。設計は、二次元CAD(いつものLilliCadです。)でやってますので、最初はラフに部品を並べていって、それに横から見た図、前から見た図、上から見た図等を書き足していき、最後にそれぞれのパーツの形状を決めます。
ようやく脚の設計が終わりました。少々見づらいですが、片足分の全貌です。設計は、二次元CAD(いつものLilliCadです。)でやってますので、最初はラフに部品を並べていって、それに横から見た図、前から見た図、上から見た図等を書き足していき、最後にそれぞれのパーツの形状を決めます。
んで、それを改めて並べ直して間違いがないか確認をしてできあがりです。その確認の絵が左の絵になります。 今回も、これをやったおかげで0.2mmのミスを発見し、事なきを得ました…。うるうる。どうしてミスったんかな〜、ぶつぶつ。
今回の大きなポイントは…S03Tを足首のピッチ軸に変更したことです。 このS03Tは、0.27sec/60degと、非常に動作の遅いサーボ(安くてトルクがあるのがウリ)なんで、当初、ピッチ軸にはどうかな〜と思ってまして、それで前バージョンまではピッチ軸はすべてMICRO-MGでまとめていました。
しかし、脚のピッチ軸についてよく考えると、基本的にヒザが最もスピードがいるところで、他はそうではないという結論(Knowledgeの「脚サーボ、速度けっこういるカモ。」)ということから、思い切って、トルク重視ということでS03Tにすることにしました。
今度は足裏サイズをぐぐっと小さくしなくてはいけないので、それの対応が主な理由です。足裏サイズが小さくなると、前後左右に対するブレの勢いをどうやって出さないようにするか、また押さえていくか?というところがポイントになると思います。んで、足首は、身体全体からみると、振れに対して一番力のかかるところになります。そんなわけで、このレイアウトにしてみました。ま、歩かせてみないとわからないんで(カタログどおりのスペックとは限らないし)、まずは作ってみようと思います。
それにしても、こうやってCAD図面にしてみると、たかだか1.2kgとはいえ、脚の長さが19cmもあるのにMICRO-MGやS03Tだけでそこそこ歩けるというG-Tuneの秘密が結構バレバレですね(^_^;。
フレームそのものは、ちょっと重くなりそうな予感です。ま、腕の方も設計終わってから、再検討することにします。 ちなみに、時々聞かれるのですが…G-Tuneの股間(左右モモロール軸の軸間)の距離は、36mmです。これは変形タイプになってから、ずっとこの数値です。
|
悩悩悩〜 |
いや〜、なかなかまとめるのは難しいですね〜
現在「GWSへの要望素案」をまとめ中ですが、なかなか難しいですね〜。改良案とかは、割と「ここが使いにくい〜」みたいな感じでいいんですが、「こんなサーボ欲しい」というあたりでなるべくいろんな意見を、と思って集めていくと、だんだんぼやけてきますし…。
- 現状価格維持、ラジコンサーボレベルでの改良
- MICRO-MG
- ガタの出ないギヤ
- ポテンショのガタを何とかして欲しい。
- 小型円形ローハイトサーボホーン
- ケーブルは30cmぐらい欲しい。
- ボトムケースの裏側の出っ張りを無くして欲しい
- なるべく俵型ではないケース
- SO3T
- 丈夫なプラギア(ファイナルから3段目さえなんとかしてくれれば…)
- モーターをケースに固定して欲しい。
- 共通
- ミミ穴は切れ目の無い4つ穴がいい。M2、M3等のネジにジャストフィット
- 基板に接着剤を剥がしやすい物だと嬉しい。
- 出力軸のセレーション仕様はアフターパーツの豊富なKO等と互換があるほうがよい。
- オプショナルパーツと新サーボラインナップ
- 反対軸付きケース
- 小型円形ローハイトサーボホーン
- 12個ディスカウントパック
- S03Tより少しグレードの高いサーボのラインナップ(値段アップも少し)
- MICRO-MGより少しグレードの高いサーボのラインナップ(値段アップも少し)
- MicroMG用オプションギア(高速用、ハイトルク用)
- MicroMG用オプションモータ(High Power)
- MICRO-MG
- ラジコンサーボをアレンジしたロボット用サーボ
- デジタル化
- ケース固定ビスは、裏側から。
- ケース固定ビスは幅が増えてもいいから4本がいい。高さは維持(MICRO-MG)
- 金属ブッシュ軸受け
- 固定用のゴムブッシュなどは不要
- その他アイデア
- 基板が焼けても、サーボの電圧が制御ラインに逆流するような事が無いように。
- スリムデザイン(高さを押さえる)
- 2軸ジャイロ、あれ、どうせだから2軸にして欲しい。
- ロボット用ならばサーボ側へのコネクタ装備
- 過電流保護リミッター
- KOみたいな上下蓋にミミがついているのは使いやすそう
- フレーム固定用のネジ穴をボディに設ける(ボディ中央パーツはアルミ製だとなおよし)
- ポジションメーターの値を外部から読めるようにする(アナログOK)
- 直交2軸サーボ
- サーボホーンを止めるM2のネジ、鉄にメッキしたのではなくステンレス
こんな感じで分けてみました。結局、「ロボット専用サーボ」っていうレベルに関しては、まだなんとも、という感じがしてきたので、関連しそうなものは「その他アイデア」に入れさせていただきました。いかがでしょうか?
|
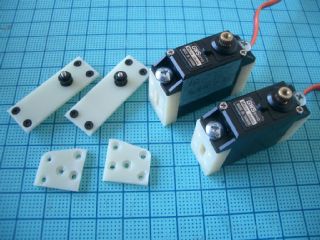
MICRO-MG用サーボジョイント・その後 |
MICRO-MG用サーボジョイント欲しい人いますか? MICRO-MG用のサーボジョイントですが、あれこれ考えた結果、以前お見せした形で今度、G-Tune製作用に作ってもらうことにしました。もし、欲しい方がお見えでしたら、実費+αでお分けできるようにしますので、メールください。代金は…ここで書いてしまうとSHOPみたいになってしまうので…サーボマウントより100円高いです(書いてるのと一緒
(^_^; )。
MICRO-MG用のサーボジョイントですが、あれこれ考えた結果、以前お見せした形で今度、G-Tune製作用に作ってもらうことにしました。もし、欲しい方がお見えでしたら、実費+αでお分けできるようにしますので、メールください。代金は…ここで書いてしまうとSHOPみたいになってしまうので…サーボマウントより100円高いです(書いてるのと一緒
(^_^; )。
配布するのは、写真のもので結合パーツなどは含みません。11月末〜12月上旬ぐらいに配布できると思います。また、随時受け付けていきますが、早めに連絡いただけるとありがたいです。お分けすることが決まった時点で、本パーツ、結合パーツのCAD図面を送付いたします。また、既にBBSの方で既に欲しいと書かれている方は優先させていただきます。期限はありませんが、早めに連絡いただけるとありがたいです。
また、モデラ等をお持ちで、ご自分で製作されたい方は、メールいただければDXFファイルとPDFファイルを配布いたします(ロボット製作をホビーでやられている方ということでお願いいたします。SHOPやられている方でも、ホビー目的で作られたロボットに使用されるのであれば問題ありません)。
連絡お待ちしてま〜す。
|
GWSへの要望、協力ありがとうございます。 |
GWSへの要望について
みなさんからいろいろな意見を頂きまして、本当にありがとうございます。たくさん書き込んでいただけて、びっくりするやらうれしいやらです。ぼちぼち、まとめていこうかと思っています。まとめた結果については、ホームページでアップします。でも結構、いろいろな意見がありますので、ある程度、SISOの趣味でまとめてしまう部分もあるかと思いますが、ご了承ください。
まとめ方は、
として、値段維持を基本として、メインは1、2で行き、将来像的な説明で、3、4、その他分類が難しいけどGWSなら!という期待をこめたあたりを5でまとめてみようと思います。また、BBSの方に書きましたが、製作事例写真もつけてみようかと思っています。もし、差し支えなければJPEG等でメール送付していただけたらありがたいです。
とりあえず、今週一杯は受け付けますので、よろしくお願いいたします。
その他雑記
今日、自分の愚かさにあきれました。。以前、デジカメを買い換えた時に余った512MByteのCFに、Homepageとかのデータを全部収納。データもモバイルだぜぃ!と思っていたら…うちのノートパソコン、カードスロットが1つで、しかもネットワークカード様がいらっしゃる。ネットワークカードをさす⇒CFカードがさせない⇒ホームページデータがアップロードできない…。嗚呼。
|
MICRO-MG ポテンショサポート |
お馴染みMICOR-MG

ZIPPONさんから頂いたブツ(テストモニター品)ですが、先日の写真ですとサイズがわからないと思いますので、MICRO-MG本体との比較写真を載せると、こんな感じのサイズです。既におわかりの方もいるかと思いますが、ファイナルギアとポテンショメータをつなぐ部品です。
これ、ZIPPONさんの発明品です。以前、大会でお会いした時に、MICRO-MGのポテンショとファイナルギアのがたつきの話をしていたら、ZIPPONさんは既に製作計画済みで、そして現在、部品をモニターさせて頂いている次第です。ありがとうございます〜。ちなみに、ワタシは、ここをテープを一枚かまして、硬く固定するというのをしようかな〜と計画していました。レベルが違いすぎ〜です。
なぜこの部分の改良が必要か?


上の写真を見てください。このテストのために、新品のMICRO-MGを使いました。どちらもMICRO-MGに1500usのパルスを入れた時の写真です。左の写真は、1000us⇒1500us、右の写真は、2000us⇒1500usです。写真では1.5°程ずれているのがわかると思います。以前計測していた時には、モノによっては、2〜3°ずれるものもありました。
この理由ですが、大きな理由の1つとしては、「ポテンショメータとファイナルギアに隙間がある」ため、ポテンショメータに正確に角度が伝わらないというのがあります。
パーツ入れ替え
これはファイナルギアの裏側です。ご覧のように、ギアの内側に金属パーツがはまっています。このパーツは、ケース側からでているポテンショメータの軸と接続する部品です。これを、細いマイナスドライバーなどでこじるとはずれます。


では、新開発アイテムを入れてみましょう。オリジナルの部品と比較すると、若干大きめです。ポイントは、オリジナルが中央部分だけちょこっと押さえているのに対して、新開発アイテムの方は筒状になっており、非常にFit!する形状となっています。


それではさいごに「ぐぐっ」と力をこめて、ファイナルギアをポテンショにはめ込みます。このパーツを入れるに限らず、MICRO-MGにファイナルギアを入れるときには、ポテンショの向きに注意しましょう。入る角度と入らない角度がありますので。

「パチ」っとね!
感動のテスト結果


この結果、見てください〜。上の写真は同じ写真ではありません。どちらもMICRO-MGに1500usのパルスを入れた時の写真です。左の写真は、1000us⇒1500us、右の写真は、2000us⇒1500usです。要は、さっきのテストと同じテストをしました。ばっちり同じところに戻っています。
とうわけで
この対策は、非常に効果があると。原理ですが、単純に「ポテンショメータの軸とファイナルギアとのガタツキを無くす」というものです。今回は、超幸運にも、こんなにしっかりとしたパーツが手元にあるわけですが、先の原理に従えば、他にもやり方はあると思います。
|
ステッカー |
おお〜いいね〜いいね〜!
Project
MAGIのZIPPONさんからブツが届きました。これです。


左の物はステッカーです。以前、ホームページで「ロボットキャリーケースの外観が寂しい」ことを書いたら、ZIPPONさんがステッカーを作ってくれました。右のパーツは…この写真だけですぐに物がわかった人は、相当なMICRO-MG通です。これからちょっとテストしようかな〜って思ってます。
さて、謎のパーツは後のお楽しみとしておいて、ステッカー、すばらしいです〜。ZIPPONさんって、樹脂加工だけじゃなくって、ステッカー製作もすごいです(あ、ステッカーは趣味だそうです)。といわけで、さっそく貼ってみました。せっかくですので、まずはアルコールでキャリーケースを脱脂し、慎重に…。


かっちょえ〜、\2,980が\10,000になった
感じです。
GWSに何かリクエストしてみます?
えっと、BBSの方も観られている方はご存知かもしれませんが、Play
Robotのロバートさん(名前は英語ですが、台湾では、外国人が名前を呼びやすいように、英語のニックネームをつけている人が多いんです)も、S03Tでホビーロボットを開発されているようです。
で、「台湾には、GWSというメーカがあるから、そこと話ができたら安いロボット用サーボとか作れるかも〜」なんて話をしていたら、GWSと話してみようという方に話が進んでいるようなので、ちょっと意見を自分なりにまとめようかな〜なんて考えています。きっと、このホームページを観てくださっている肩の中には、GWSユーザの方も多いと思いますので、もしよろしければ、ご意見お待ちしています。
ご参考までに、今、考えているまとめ方ですが、まずターゲットは軽量級(1〜1.5kg)のロボットに絞って、MICRO-MGとS03Tあたりで行こうかと思っています。で、レベル1、2、3ぐらいで難易度分けて、レベル1なら「裏蓋にネジ穴欲しい」、レベル2なら「コストアップしてもデジタル化」、レベル3なら「超小型だいなみくせる(^_^;」みたいな話でどうかな〜と思います。
ということで、BBSの方に、スレッド立てて起きますので、よろしくです。
あれ?何気にGWSのホームページ見ていたら、「S03T 2BBMG」というのがありますよ〜!?
|
センタードリル到着 |
90度のセンタードリル


オーダーしていたセンタードリルが届きました。ABSに使って、どれくらい効能があるかはわかりませんが、サラビスの皿穴あけ用も兼ねてΦ4、Φ6、角度は90°です。うん、M2、M3の皿穴あけにピッタリサイズ。こういう考え方で買うのって、た、た、正しいですか?
それにしても、大きな箱に入ってました…。
|
アイデアが形になった幸せを噛み締めながら |
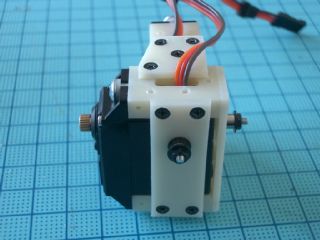
アイデアが形になった幸せを噛み締めながらテスト組み立て
先日、テストピースができたSISO-LAB発明品1号?ですが、今日は、補助パーツも作って、組み立てテストをしていました。何を意図したものなのかをご紹介します。名前はまだ決めていないんですが、仮にジョイントパーツと呼ぶことにします。
基本的な使用方法

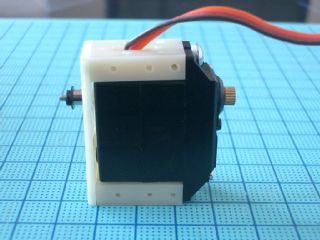
これがジョイントパーツの基本的な使い方です。MICRO-MGにM3のビスとブッシュで固定します。右の写真のとおり、ケーブルのゴムブッシュははずしてつけています。つけたままできないかな〜と、いろいろ設計ひねってみたのですが、うまく収まらず、現在のデザインになります。
で、この部品、6面にいろいろな穴が空けてあります。サーボミミと結合する部分がΦ2.6、その他の5面には、Φ1.5が数個ずつ、そして中央に、ケーブルを通すため(軽量化兼用)の大きな穴が空けてあります。

上の写真は、G-Tuneのモモの付け根ですが、ここに使っている、MICRO-MGと本体を接続しているパーツの汎用バージョンといった感じです。要は、サーボマウントらしきものです。これを使うと、上記の写真のような、直角にパーツを結合することも可能になります。これで、樹脂フレームの泣かせどころである、直交部品の結合や、サーボ回りをコンパクトかつ簡単に組み付けてしまおう!というものです。
反対軸編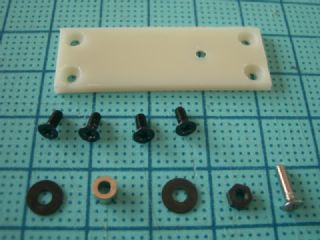

上記のようなパーツを作ると、下側にM2用の穴があいており、それで固定することができます。
とうわけで、こんな感じで反対軸が作れます。
直交軸編
反対軸パーツを2組と、ちょっとした板部品を作ると…
あこがれの直交軸を作ることができます。ちなみに、反対軸で作ったパーツと、この直交軸パターンで使用している反対軸パーツは、まったく同じモノです。ちと、設計に力を入れまして、こういうのが作りやすように考えています。
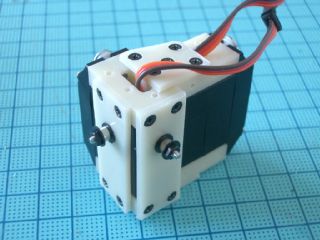
ブロック組み編
では、最後に、ブロック組み(なんという名前がついているかは良くわかりませんが…)タイプです。

下の写真のような、結合用のプレートを作って、2つのサーボのそれぞれのジョイントパーツを、結合用のプレートにネジ止めします。


そうすると、ほら!このような足首などに良く使われているパターンの組み合わせも可能になります。でも、直交軸より強度が出ていないので、この場合は、3mm厚(他は2mmです)で結合する方がいいのかもしれません。
また、肘など、板材にそのままサーボを貼り付けるような感じで実装する場合は、これと同じ方法で固定することができます。
まとめ〜
これを使えば、MICRO-MGでのロボット製作が、ぐぐっと楽になると思います。また、アルミと組み合わせてもいいかな〜なんて思いました。ただ、やっぱ、結構、ギリギリなところに穴をあけてもらったので、ネジ締めは、ちゃんとタップを切ってからじゃないと、少々ゆがみがでました。いきなりネジをねじ込んではいけませぬ。ここまでは思惑通り!なので、このまま行こうかな♪
次期G-Tuneは、腕と、最初の目的であるモモのあたりはこれでやります。また、これを使って、G-Tuneとは違うタイプの「お手軽ロボット(あこれがれ直交軸付き!)」を作ってみようかな〜なんて思っています。
試作につきあってくださっている西さんに感謝感謝!
というわけで…
どっかのお店でこれ作って、安く売ってくれないかな〜
なんて思う今日この頃デス。
|
プロポをマイコンで制御・その3 |
さて、プログラム解説
というわけで、気になるプログラムですが、サンプルで、「キーボードをプロポスティックに見立てて操作するプログラム」を作ってみました。操作イメージは次のような感じです。キーボードのぽっちがついているキーを中心に、上下左右という感じで振ってみました。例えば、「R」を押すと、左スティックが上、「F」を押すと中央に戻ります。例によって、GDLを使わさせて頂いています。
| 左スティック |
○ |
右スティック | ||||
| E | R | T | Y | U | I | |
| D | F | G | H | J | K | |
| C | V | B | N | M | , | |
TimerWの初期化
TimerWを18msecで折り返すということで、今回は、GRAによるカウンタのクリア機能を使用します。TimerWは、16bitなので、黙って走らせておくと、「0〜65535」までのカウントアップしてまた「0」に戻るという動作をするのですが、この機能を使用すると、「GRAに設定した値になると0に戻る」という動作をしてくれます。今回、カウンタは、φ/8でカウントアップされますので、「1/16MHz*8」が1カウントに必要な時間になります。18msカウントするためには、36000までカウントすれば良いことになります。
また、GRBのコンペアマッチによって割り込みをかけます。よって、初期化プログラムは以下のようになります。
TW.TMRW.BYTE = 0x48; // タイマストップ、モード普通
TW.TCRW.BIT.CCLR = 1; // GRAコンペアクリアあり
TW.TCRW.BIT.CKS = 3; // φ/8
TW.TIERW.BIT.IMIEB = 1; // Bコンペアマッチ割り込み有効
数値をDEFINEで定義
これは、見易さとか、趣味の問題なのですが、プログラム中で使う数値を"#define"等で宣言します。例えば、いきなりプログラム中に「36000」と書いてあるより、「DDFT_TCNT00180S」と書いてあった方が、「ああ、0.018secか〜」ってわかりやすい気がするので、こうしています。こんな風に定義しました。
#define DDFT_TCNT00180S 36000 // 16MHzで1/8の18msカウントアップ初期値
#define DDFT_TCNT00004S 800 // 信号と信号の間のLOW時間
#define DDFT_TCNT00006S 1200 // スティックLow Low(600us)
#define DDFT_TCNT00011S 2100 // スティックCenter(1100us)
#define DDFT_TCNT00016S 3200 // スティックHigh High(1600)
#define DDFT_SIGNALOUT IO.PDR8.BIT.B2 // トレーナ信号出力端子
#define DDFT_SPOS_HGH 0x01 // スティック位置定義
#define DDFT_SPOS_CNT 0x02 // スティック位置定義
#define DDFT_SPOS_LOW 0x03 // スティック位置定義
グローバルデータ
このプログラムで使用する、グローバルデータは次の2つです。
_BYTE GVDbSignalStep; // 信号処理ステップ(0:最初の0.4ms,1:CH0,2:0.4ms,3:CH1...)
_BYTE GVDabStickPos[4]; // プロポスティック位置
「GVDbSignalStep」は、TimerW割り込み処理のところで詳しく説明しますが、全体の処理のステップ(最初に0.4msのLOWを出して、つぎにCH0の信号を出して…みたいな処理)を覚えておくための変数です。「GVDabStickPos[4]」の方は、プロポスティック位置相当のデータをキーボードからの入力によって覚えておくためのデータです。
TimerW割り込み処理
さて、一番複雑な部分のTImerW処理です。逐次動作を変えないといけません。前回の説明を見ていただくとわかりますが、まず最初に「0.4msのLOW」、そして次に「CH0にあわせた時間のHIGH」、そして…という感じで、動作を変えていく必要があります。そういうわけで、グローバルデータを1つ用意し、これを動作ごとに1つずつインクリメントし、それで動作を切り替えることにします。
void int_timerw( void )
{
// GRB コンペアマッチ 信号作成用カウントアップ
if( TW.TSRW.BIT.IMFB == 1 ){
TW.TSRW.BIT.IMFB = 0; // 割り込みフラグクリア
switch( GVDbSignalStep ){
case 0: // 初期化(0でコンペア)
DDFT_SIGNALOUT = 0; // LOWにする。
TW.GRB = DDFT_TCNT00004S; // 最初の0.4msを設定する。
break;
case 9: // 最後信号の0.6ms ON。
DDFT_SIGNALOUT = 1;
TW.GRB += DDFT_TCNT00006S;
break;
case 11: // 最後
DDFT_SIGNALOUT = 1; // HIGHにする。
GVDbSignalStep = 0xFF; // 初期値(インクリメントして0になる)
TW.GRB = 0; // 初期化する。
break;
default:
if(( GVDbSignalStep & 0x01 ) != 0 ){ // 奇数ならば信号出力
DDFT_SIGNALOUT = 1;
switch( GVDabStickPos[(GVDbSignalStep/2)] ){
case DDFT_SPOS_HGH: TW.GRB += DDFT_TCNT00006S; break;
case DDFT_SPOS_CNT: TW.GRB += DDFT_TCNT00011S; break;
case DDFT_SPOS_LOW: TW.GRB += DDFT_TCNT00016S; break;
default: TW.GRB += DDFT_TCNT00011S; break;
}
}
else{
DDFT_SIGNALOUT = 0;
TW.GRB += DDFT_TCNT00004S;
}
break;
}
GVDbSignalStep++;
}
}
いきなりちょっと長いですが、「GVDbSignalStep」というグローバル変数を使用して、これを、0〜11に変化させることでCASE文の中を飛ばしています。昨日の処理の表と見比べてみてください。この「GVDbSignalStep」とう変数の数値と、昨日の表の項目番号は一致しています。
昨日の表をよく見るとわかるのですが、「9」と「11」を除いた奇数の時には「スティックに応じた位置の出力」、偶数の時は「0.4ms」の出力の処理になります。おっと、よくみると「case 0:」は不要な感じですね〜。すいません、余分なものをいれてしまいました。
後は、これにキー入力処理をいれたら出来上がりです。ご参考、実験用ということで、完成プログラムはここです。
さて、これを使えば…オリジナルで作ったコントローラパッドからの入力をマイコンで受け、それをプロポのスティック位置として出力することができそうです。おっと、最後になりましたが、実験される時は、「プロポ左上のボタンを押す」ことをお忘れなく。
|
プロポをマイコンで制御・その2 |
近々BBSサーバ引越し予定
お気づきの方もいらっしゃるかと思いますが、Top
Pageのカウンタを数日前に変更しました。現在、BBSの方も引越し準備中でテストしています。明日あたり、移行させようと思っていますので、もし、不具合がありましたら、連絡お願いいたします。
SISO-LAB発明品?到着
ふっふっふ。次期G-Tuneの製作を簡易なものにする、SISO-LAB新発明品?のテストピースが届きました。製作協力してくださったのは、JOE2を製作されている普通の会社員様!(西さま♪)すばらしい、イメージどおりのできです。うぉぉ、これがモデラの実力か〜。5面加工、どうもありがとうございます〜。お願いしておいてなんですが、どうやってこんなもん作るんだろう???すごいなぁ。
現在、これに接続する部品を作っていますので、週末あたりに発明評価レポートをアップします。なんの部品かはお楽しみ〜!(夜は写真撮るの、難しいです。週末は、ちゃんと昼間に撮ろう)

というわけで…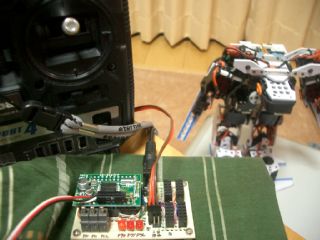 つなげてみました。ベースボードとの結線が、以前壊したS03Tのケーブルを使ってたりと、微妙にせこかったりしますが、評価には充分です。接続は、P82(たまたまテストボードにサーボ出力用にピンが立ててあったから)からトレーナ端子の一番上(入力)に接続しています。コードを修正していただければ、どの出力ピンでもOKです。おっと、P56とP57だけはやめておいてください。あのピンだけは出力レベルtが値がいますから。
つなげてみました。ベースボードとの結線が、以前壊したS03Tのケーブルを使ってたりと、微妙にせこかったりしますが、評価には充分です。接続は、P82(たまたまテストボードにサーボ出力用にピンが立ててあったから)からトレーナ端子の一番上(入力)に接続しています。コードを修正していただければ、どの出力ピンでもOKです。おっと、P56とP57だけはやめておいてください。あのピンだけは出力レベルtが値がいますから。
さて、気になるプログラムですが、今回は、TimerWを使用しました。18msecの基本周期が必要になりますので、TimerWのコンペアマッチクリア機能を使用して作ります。コンペアマッチクリアというのは、あらかじめジェネラルレジスタに値を設定しておき、カウンタがその値になると、自動的にクリアされる仕掛けです。ジェネラルレジスタA(GRA)のみ、この機能を使用することができます。
そして、GRBによってコンペアマッチ割り込みを適宜発生させるようにします。H8/3664のCPUクロックは16MHzですので、1/8周期でカウントアップした場合、2000カウントで1msecになります。下の図で説明しますと、GRAによって、36000カウントでタイマがクリアされるようにしておいて(黄色い線)、GRBによってそれぞれのタイミング(緑色の線)で割り込みをかけます。そして、制御信号(青色の線)が出力されます。
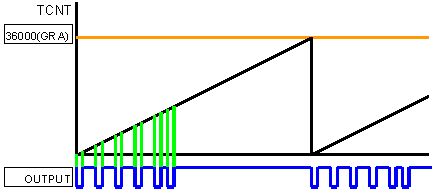
GRBによる割り込み処理内容
GRBの割り込み処理の内容は次のようになります。表中に「+800」という表現がありますが、カウンタは先の説明の通り、0〜36000(18ms)で変化するように設定して使用していますので、比較する方のGRBも、随時、値を足し込んでいくという意味で、こういう表記にしています。
| 0. | 0 CLK | 信号をLOWレベルにしてGRBに+800(0.4ms)を設定。 |
| 1. | +800 CLK | 信号をHIGHレベルにし、GRBにCH0のスティック位置に応じた時間(+CLKCH0)を設定。 |
| 2. | +CLKCH0 CLK | 信号をLOWレベルにしてGRBに+800(0.4ms)を設定。 |
| 3. | +800 CLK | 信号をHIGHレベルにし、GRBにCH1のスティック位置に応じた時間(+CLKCH1)を設定。 |
| 4. | +CLKCH1 CLK | 信号をLOWレベルにしてGRBに+800(0.4ms)を設定。 |
| 5. | +800 CLK | 信号をHIGHレベルにし、GRBにCH1のスティック位置に応じた時間(+CLKCH2)を設定。 |
| 6. | +CLKCH2 CLK | 信号をLOWレベルにしてGRBに+800(0.4ms)を設定。 |
| 7. | +800 CLK | 信号をHIGHレベルにし、GRBにCH1のスティック位置に応じた時間(+CLKCH3)を設定。 |
| 8. | +CLKCH3 CLK | 信号をLOWレベルにしてGRBに+800(0.4ms)を設定。 |
| 9. | +800 CLK | 信号をHIGHレベルにし、GRBに+1200(0.6ms)を設定。 |
| 10. | +1200 CLK | 信号をLOWレベルにし、GRBに+800(0.6ms)を設定。 |
| 11. | +800 CLK | 信号をHIGHレベルにし、GRBに0を設定。 |
長くなったしまったので、ここらで一旦切りまして、明日はいよいよプログラムの解説をします。
ところで、OLMECAの部屋のイカガワさん、Hashioさん、元気〜?今は大学祭とかかなぁ。トレーナ機能はこれであってる???
|
新レギュレーション |
J-Class with
Family特典10秒…。
新レギュレーション発表されましたが、J-Classも足裏サイズ規定が変わっていたのには驚きました。でも、2種類足裏を作らなくて済むのでよかったです。それにしても特典10秒ですか〜、高校生以上には、ますます厳しい。でも、大会側の「with
Family」の意図はよくわかるので、OKOK。さらにROBO-ONE、J-Classともに、1試合1ラウンド?
そういえば、「審判」が「レフリー」という表現に変わっています。そうそう、前に「ワールド☆レコーズ」を見て思ったのですが、レフリーの方には、ぜひ、フォーマルな服装か、スペシャルな服装(こすぷれ?)お願いしたいです。蝶ネクタイいいですね〜♪
また、第5回大会からは無線化との記述があります。できれば、今回はどちらもOKにしてくれるとありがたいんですが…J-Class参戦予定で、無線化に問題ないメンバーのみなさん、一緒に嘆願しませんか?
ちょっと間が空いてしまっている、プロポ・トレーナの方、今日、大体書き切りましたので、明日からその2、その3をアップします。お楽しみに〜。
|
台湾のホビーロボット事情? |
台湾でも二足歩行ロボット、売ってる…
実は数日前、台湾の友人からメールが「てぃろりろりん」と来ました。ふむふむ、なになに?「ROBO-ONEに非常に興味があって、今、勉強中。」とのこと。説明を簡単にするために、少々脚色がありますが、だいたいこんな感じです。で、続きですが「台湾で友人(彼の)がROBOTショップを開いている」とのことで。さっそくURLを教えてもらいました。せっかくなので紹介します。お店の名前は「Play
Robot」というとのこと。

むむむ、すごい…台湾にもいつの間にやらこのような店があったとは…。ちなみに「機器人」は「ぢーちーれん」と言って、ロボットのことです。「人」とついてますが、一般的にロボットのことをそういうらしいです。なかなかの品揃えです。しかし、個人的にもっとすごいな、と思ったのは、ホームページに携帯電話の番号が載っていることです。お国柄かな?(あ、オーナー、怒らないで…^ ^;)
そして、「ROBO-ONEを台湾で開催するため、活動していきたい」とのこと。台湾の人は、パワフルな方が多いので、きっと彼らなら実現しそうです。
いや〜、びっくりです。
追記)今日も見つけました。ONOの電脳壁新聞。