|
GP850とGP950 |
よく考えれば想像はついたんだけど…
G-Tuneでは、単4サイズのNiMHを、自分でパックして使っているのですが、う〜ん、GP950の直径は、GP850と比べると、0.2mm程大きいです。G-Tuneの場合、1列に並べて載せるので0.2x6=1.2mmとなり、「うお、スムーズに入らない〜」という事態になりました。ま、押し込めば入るのでよしとしましたが、みなさんも、容量アップさせるときは気をつけましょう。
キューティーハニー
ワールド☆レコーズ、観ました。う〜ん、どちらもすごい!それにしてもキューティーハニーの動き、よかったな〜。さすが、中村さん。デザインもすばらしいけど動きがすごくいい!感激。ROBO-ONEの方にもエントリーされているようなので、楽しみです。
G-Tune開発進捗…変化自在な動きのために
ようやく、基本ポジションの遷移作りこみOK。今回、全体で楽をしようと思い、1つのスクリプトですべての姿勢変更と遷移を行うようにしました(そのために、関数呼び出しもどきの処理を追加しています)。
「遷移」ってなんぞや?というと…G-Tuneは、「直立」、「しゃがみ」、「格闘」、「しゃがみ格闘」、「超しゃがみ」の5つの基本姿勢を持つのですが、
それぞれの移行パターンを作っていると、20パターンになってしまい、作るのもさることながら、メンテナンスするのも大変になってます。
そんなわけで、例えば「直立」から「超しゃがみ」に移行するために、一度、「しゃがみ」を経由するようにしています。
スクリプト内で変数を扱えるようにしてあるので、現在の姿勢(最後に実行した姿勢ということです)を変数に記憶しておき、新要求姿勢に応じて動作を変えるようにしています。
ギリギリですが、なんとか1スクリプトに収まりました(1スクリプトは250ステップ)。よかったよかった。
ちなみに、前回は、同じようなスクリプトが5個、バラバラに書いてあったので、メンテがホント大変でしたが、これでスッキリです。
後は荒削りですが、歩行なんとかしました。やっぱり、ピッチ軸に使っているMICRO-MGとS03Tの動きのクセに泣かされています。 きっと、デジタルサーボなら混在でもあまり気にならないんだろうな〜なんて思いながら、クセを見込んだスクリプトに修正しています。 アナログサーボ(安いやつ)を使う時は、ピッチ、ロールなどでそろうようにした方ががよさげです。
|
サイクル充放電結果の続き |
第6回大会から使っているバッテリーパックは…
以前から使っているバッテリーパックは全部で4つあるのですが、あれから全部、5回ずつサイクル充放電(0.5C)を
かけてみたのですが、620〜680mAhぐらい充電できることがわかりました。充放電は化学変化もの、連続でやるのもどうかなと思うので、また数日おいてから再度やってみようと思います。
というわけで、明日は、新品の950mAhをやってみたいと思います。せっかく、充電量とかがわかるようになったので、これからは、マメにチェックしたいと思います。あ〜、なんか楽しい。 SWALLOW advanceを使いはじめて思ったのですが、結果が目でわかるというのはとてもおもしろいですし、サイクル充放電というのも便利です。
ただ、今まで使っていた秋月のやつ(SISOが使っているのは…充電器、放電器、電源)も、たまに充電が早く終わっちゃったりして気が付かなかったりするんだけど(早く終わるときは、5分とか、すぐに終わっちゃうので、ちょっと気をつけていれば、本当はわかる)、今まで大きなトラブルもなく、しかも安いということを考えると結構いいです。なんといっても電源込みで\3,500でそろいますから。秋月恐るべし。そういえば、秋月で「ルネサステクノロジH8マイコン HD64F3694FPタイニーマイコン」のチップを扱い始めましたね。うわさのH8/3694ボードもそろそろかな?
エントリー台数
ROBO-ONE
をチェックしたら、最終エントリー台数が出ていましたね。ROBO-ONE 168台、ROBO-ONE
J-class 44台。
う〜ん、今回もすごいのがいっぱいな感じです。歩行とかは明日がんばろう。
姿勢別ポジション出し
今日は、ずっと姿勢別の基本ポジション出しと移行スクリプトの作成。ご存知の方もいらっしゃるかと思いますが、G-Tuneは、直立して歩行したり、しゃがんであれやこれやしたりします。あの動きは、4つの基本ポジションがあって、そこから動作開始するようになっています。で、この基本ポジション作りというのが、なかなか気を使う作業でして、「無理が無い」、「すばやく移行できる」、「バッテリーを消費しない」などの条件で設定しています。実際の操作は、これらのポジションをプロポの右スティックで移行させ、左スティックで歩行、格闘等を行うようにしています。
そういえば、Kenさんのところで、一昨日の不定期TOPICネタ(ARK07のサーボ)の解答(回答?こういうコミュニケーションも楽しいですね〜)が載っていたのですが、やっぱり20kg-cmの賢いやつでした。う〜む、恐るべし。
|
サイクル充放電結果 |
620mAhになりました
さてさて、昨日の80mAhしか充電できなかったNiMHバッテリですが、5回のサイクル充放電で620mAhまで入るように
なりました。きっと痛んでいるというよりは、メモリー効果とやらがひどかったんでしょう。じゃあ新品ってどう?
なんて思いまして、今週末にでも新しいバッテリーパックを作ってトライしてみたいと思います。
情報収集
fuRo
---未来ロボット技術研究センター に掲載されていた情報によれば、今回は、エントリー台数167体!J-Classは44体。すごいですね〜。
控え室、入れるのかな???
なんて思いながら、J-Classの方のエントリーを見ると、すごそうなマシンばかりです。で…「う、うぉ、これは!?」 と思ったのが、KenさんのARK07。 足首のサーボに赤いラベルがちらりと見えています。ホームページの方を見させていただいたら、Red-Versionとだけ書いて ありました。でも、そのサーボって…トルク20kg-cmの賢いやつですか??? ラベルが銀赤(784は銀赤銀)でミミがついているように見えます。す、すごいかも…。
|
青いヤツ |
SWALLOW advance

赤いのか青いのか、さんざん悩んだのですが、結局、好きな色である青色の方を買いました。いやいや。ネットで購入したのですが、お店の方に、ちょっとメールで話を聞かせてもらって検討した結果、SWALLOWの方にすることにしました。
 |
実は、充電器のことを調べ始めるまで知らなかったんですが、この充放電器の電源は、
わに口クリップになっています。車用のバッテリにつなぐためだと思います。本当は電源に直付け
しちゃうほうが安全性の点でもいいと思うのですが、まずは動作チェックということもあって、
手持ち部品で写真のような端子台+電源コネクタを作ってみました。裏側は、太い電線が手元に
無かったので、はんだ吸い取り網で配線しています。 電源は、秋月電子で購入した、12V5Aのスイッチング電源 です。たぶん、単4の6セルを充電することが多く、この先も単3ぐらいかな〜と思っているので、 これで充分だと思います。 |
 というわけで、さっそく充電開始。ターゲットは非常にモチの悪くなった
お手製バッテリーパック(NiMH850mAh6セル)。このバッテリー、充電しても30秒ぐらいで終わっちゃう
ような状態でして、まずはどれくらいはいるんだろう?ということでテストです。
というわけで、さっそく充電開始。ターゲットは非常にモチの悪くなった
お手製バッテリーパック(NiMH850mAh6セル)。このバッテリー、充電しても30秒ぐらいで終わっちゃう
ような状態でして、まずはどれくらいはいるんだろう?ということでテストです。
さてと設定設定。ん?どこでセル数を設定するんだろう?電流の設定はありますが、セル数の設定が 見当たりません。説明書を読んでも書いてないので、「自動に違いない」ということで、スタートして みました。やっぱり自動のようです。
結果は…まだSWALLOW advanceの操作に慣れていないので、違うところを読んでいたらごめんなさい
なのですが、それらしいところの表示を読んでみると、80mAhしか充電できなかったようです。
ひ、ひどい…。こりゃ〜確かに30秒しか動かないわけです。納得。バッテリーさん、ごめんなさい。
ZIPPONさんのところでもしばらく前に
充放電器の話があって知ったのですが、うちのNiMH管理もかなりひどいです。充電したままほおって
おいたし、悪いと思いつつ追加充電するし、それに過放電ですし(^_^;...
というわけで、ダメモトですが、充放電のサイクル設定をしてどの程度復活するかチェックです。 充放電サイクル回数は5回まで設定できるようです。設定値は充電0.5A、放電0.5A、終止電圧4.8Vに 設定しました。電池が850mAhなので、だいたい0.5Cってところです。終止電圧は、6セルなので 1セルあたり0.8Vです。一般的には1セルあたり0.9〜1.0Vだそうですが、「ちょっと低めでカツを入れる」 という話を聞いたことがあったので、ダメモトで自己責任設定しました(笑)。
結果はまだでていませんが、ちらちらっと見ていると、初回、15分ぐらいで1サイクル終わったのが、 どんどん長くなっているようです。うむうむ。だんだん性能が戻ってきている感じです。80%ぐらいまで 復活してくれるといいな〜。
|
う〜む。サーボの個性。 |
屈伸難しい…
ホームポジションだしも完了し、さわっていた感触から「今回のメカはいい感じだな〜」なんて思っていたのですが、
屈伸でいきなりつまづきました。
今回は、脚のピッチ軸に、モモ、ヒザはMICRO-MG、足首はS03Tにしたのですが、それぞれの動作のクセが違うので、 すんなり思ったどおりに動いてくれません…ということに気づいてしまいました。ぐぁぁぁんです。
MICRO-MGは「目標値までぐいっと動いて、ややオーバーシュート気味で目標値へ移動」に対して、S03Tは 「目標値手前からジワっと目標値へ移動」するようです。今まで気づきませんでした…。そんなわけで、 足首に使っていることから、屈伸状態から直立状態に戻る時にのけぞってしまいます。もちろん、サーボの動作速度仕様の 範囲で使っているのですが…。う〜ん、どうやって調整しようかな〜。
ピッチとかロールで、サーボの特性(種類)はそろえた方がいいようですね。でもMICRO-MGだと足首のトルクが ちょっと足りないんですよね〜。
ま、それはそれ、Action Scriptで何とかすることとして、もうちょっとがんばってみることにします。 ま〜、安いサーボ使っているわけですから、資金面で他の方より苦労していない分、別の苦労があるということで。 はい。
Team
Pirkus・R
J-Classエントリ、そろってきた感じですが、どうなんでしょう?見てたら、「Team
Pirkus・R」が! I-Beeさんがエントリーされているんでしょうか?動きを直に見るのが楽しみです。サーボの話とか、
いろいろ聞かせてもらえるとうれしいな〜。
っと、こっちもいろいろ作りこまなくちゃ。
|
本日の作業 |
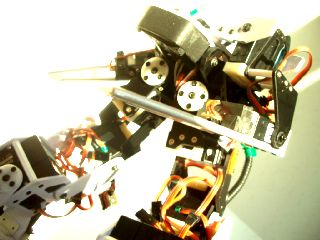
G-Tuneのホームポジション出し
一番神経を使う作業のような気がしているのですが、G-Tuneのホームポジション出し、完了です。う〜ん、なかなかいいメカだ。このG-Tuneは、前のG-Tuneと違って、前傾姿勢をとらなくても前後にぶるぶるしない。G-Tuneを後ろからつっついて、発振しないところを嫁さんに自慢してみたり。さ〜て、これから整線。
現在、鋭意製作中…
今度のROBO-ONEのために、友人Mさんの力を借りて開発中のものです。ようやくはんだ付け全部終了。最終的には、ボタンカバーがつきますので、もっとかっちょよくなる予定です。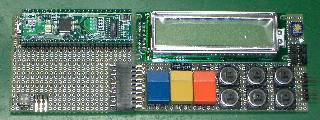

これを作っていてわかったことがあります。秋月で購入した「LCDキャラクタディスプレイモジュール(16×2行バックライト付)」なのですが、これって、裏面をはんだづけして抵抗をつけるとバックライトがつくんですね〜。SISOは、下の写真のようにつけてみました。ついているのは100Ωのチップ抵抗2つです。並列なので50Ωになっています。

|
兎さんからのプレゼント |
ようやくアップしました。
三月兎さんのRobot-Fanにて
G-Tuneのパズルがアップされていますが、三月兎さんのご好意で、こっちにもアップ
させていただきました。三月兎さん、ありがとうございます(htmlのソースまで頂きまして、
本当にありがとうございます)。ちょっとやってみましたが…821秒?もかかってしまいました。とほほ。
このG-Tune2004F、デザイン的には一番気に入っているやつです。今回のG-Tune2004FIIも
そうなんですが、高機能実現のために、だんだん格好悪くなっていっているような気が
しています。ただ、自分自身の製作レベル(設計とか加工の腕前とか)も上がってきて
いると思うので、次回あたり、デザインと性能の両立をさせてみたいです。
なんだか、初心を思い出した気分で、密かに燃えてます。(^_^)/
ランチマット購入 100円ショップでランチマットを購入。マシーンをいろいろ動かしていると、結構、テーブルとかに傷がついてしまうので、何かいいもの無いかな〜と思っていたら、割とリングのグリップに似た感じのランチマットを発見!
100円ショップでランチマットを購入。マシーンをいろいろ動かしていると、結構、テーブルとかに傷がついてしまうので、何かいいもの無いかな〜と思っていたら、割とリングのグリップに似た感じのランチマットを発見!
時々、「リングの表面ってどんな感じですか?」という質問を受けるのですが、安いコタツのつや消し天板をイメージしてもらったらいいと思います。だいたいわかりますでしょうか?
|
進捗思わしくなく。というわけで挽回作戦発動。 |
ややへこみ気味
新型SIPHA
COREを載せようとしていたのですが、前回のもので行くことにしました。どうも、新型SIPHA COREだと
デザインがしっくりこない!というわけで作り直しも考えたのですが、時間も押していることから、G-Tune 2004FIに
載せているハードでプログラムを新機能追加でいくことにします。
実際にG-Tuneに載せるSIPHA COREは何かとテストしにくいので、テスト用のボードなんてのもあったりします。せっかくなので、写真を載せておきます。


|
復帰 |
新型SIPHA
CORE
ようやくROBO-ONEモードに戻ってまいりました。ネットを見ると、浦島太郎状態であちこちチェック中です。
と、いろいろ驚いてばかりではしょうがないので、新型SIPHA COREの写真をアップします。まずは構成写真から。じゃん!

CFメモリとカードは、サイズ比較のためで、全然SIPHA COREには関係ありません。左上がコネクタ基板、右上がR/C受信機、左中がベース基板、右中がAKI-H8/3664です。ベース基板には、電源回路、シリアルEEPROM(32K)、加速度センサを搭載しています。組み立てると、下のような写真になります。



なかなかのサイズが実現できているのではないかと思います。だけど、ただ1つ問題が…。この新型SIPHA COREの全機能を使用するためのソフトウェアが、まだできていません。はうぅぅぅ。 前回実装していた機能については既に移植済みなんですが、最近はやりの「ジャイロ」を使うためには、どうしてもこの新型でないと。
その他、うれしい話題!
三月うさぎさんの「Robot-Fan」にて、G-Tuneパズル公開。
うれしいです〜。全部で4台公開されているのですが、あのロボット群の中に、G-Tuneなんぞいれてしまってよいのでしょうか?うれしすぎて、どうにかなりそうです。それにしても、なぜ、三月うさぎさんは、SISOが、G-Tune2004Fのデザインが一番気に入っていることをしっているんだろう???
そして、変形ロボット新情報!BBSの方へ書き込んでくださった、ラーヴァさん製作(「BERGKATZE」)のROBO(という名前なのかな???)、なんと獣型変形(動画あり)します。浅草ギ研ブラケットを使用して作られていますが、いい感じにまとまっています。ああ、ワタクシメも、新しいタイプの変形ロボットが作りたい〜。
|
ぐぐっと高さを押さえた加速度センサの取り付け方法 |
加速度センサ、どうやって実装していますか?
現在作成中の新SIPHA
COREでは、加速度センサをACB302からADXL202に戻しました。というのも、倒れ判定ぐらいならばACB302直付けで全然問題無いのですが、それ以上のことをやってみようかな〜と思うと、オペアンプで増幅しないときつそう…オペアンプの使い方もよくわからないのですが…ということで、結果的に部品が増えてしまいます。
さて、このADXL202(現在、品切れ中ですね…)、同梱されている部品で取り付けると、結構、背が高くなってしまいます。G-Tuneのサイズじゃ入れる場所がない〜というわけで、高さを押さえて実装しています。
まずは、そのまま実装した場合の写真です。

すごい背が高いです。AKI-H8/3664の下に入れたかったのですが、とてもじゃないですが入りません。G-Tune2004Fに載せていた時は、普通サイズのピンヘッダ+ピンコネクタの隙間に入るように、それはそれで苦労してつけたのですが、今回は、背の低いピンコネクタで行こうと思っていますので、さらに低く取り付ける必要があります。
そこで編み出したのが、こんな技です。
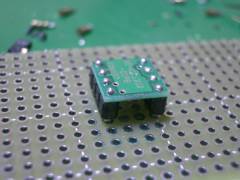
まずは、付属の連結ピンを、こんな風に固定してハンダ付けしてしまいます。

そして、ニッパで切ります。切った方を、後でソケットに差し込みますので、丁寧に、無理せず、方向を変えながら少しずつ切ってください。後で、切り口をヤスリがけしておけばバッチリです。

はい、できあがりです。一列4Px2でICソケットをつけてに取り付けるとこんな感じになります。これなら、低いピンヘッダでつけたH8/3664の下側でも入ります。RS232Cのレベルコンバータの下でも大丈夫です。

非常にイレギュラーなやり方な気もします(抜き差しが怖い…)ので、真似しない方が良いかもしれません。とりあえず今のところ、基板からピンが抜けるなどの不具合はでていません。
今回、これをデジタルで取り込んでアレコレしてみようと思っています。それにしても、ADXL202、また品切れということで、やっぱりACB302の方がいいのかな〜。実は、2005/01/30に紹介した、H8/3664の便利グッズも、似たようなやり方でマウントするようになっています。
一週間ほどネットから離れますがご心配なく
え〜っと、明日から家族と旅行にでますので、しばらくホームページの更新が止まりますが、元気にやっていると思いますので、ご心配なく。ちょっと、ロボットから離れて充電してこようと思います。
|
KPIT HEW3+GCCでI/Oレジスタ操作(大丈夫かな?) |
KPIT
HEW3+GCCでシミュレータデバッグ
HEW3では、シミュレータデバッグといって、マイコンを使用せずにHEW3上でプログラムを実行させて、変数の変化などをチェックする機能があります。やり方については、KPITで公開されている「KPIT
Cummins
GNUツールを使用する為に」を読んでいただければバッチリ(フリーで配布していて、しかも日本語ページまで用意しているなんてすごいな〜って思います)いけると思いますので、一度、こちらを読んでみて下さい。ブレークポイントを設定して変数の内容を確認するといったことができます。
I/Oレジスタ操作ってできないのかな?
HEW3には、I/Oレジスタをシミュレータ上で操作する機能があるのですが、KPIT
HEW3+GCCでこの機能を呼び出しても、空っぽのウィンドウが表示されるだけで、なんか使えなさそうな雰囲気です。ユーザーズマニュアルを読むと、I/O定義ファイルを用意してやればいいようなのですが、なんか書くのも大変そうです。とはいえ、実際のプログラムのデバッグをしようと思うと、これが使えないとかなり苦しいですよね。というわけで、うちでやっている少々強引なやり方を紹介します。
一番最初にやってみたのは、I/Oレジスタも、プログラムから見ればメモリなので、ひょっとしたらインスタントウォッチから表示させたら操作できるようになるのではないか?と思って、インスタントウォッチに追加してみました。プログラムは、「KPIT HEW3+GCCでシリアル通信(H8/3664)」で紹介したものです。
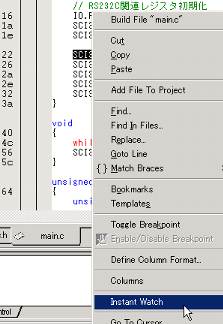
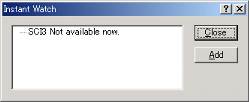
こんな感じで、変数のところでマウス右クリックしてメニューを呼び出して追加します。すると…。なんだか寂しいメッセージが表示されます。デバッグ実行させるとわかるのですが、ずっとこのさみしいメッセージが表示されてて、内容は表示されません。
ならば…擬似擬似I/O操作
所詮、ここはシミュレータ環境。実機の環境とは違うというわけで、こんな強引な方法をやってます。それは、「I/Oレジスタを、通常のメモリ空間に押し込んでしまう」です。おお〜、ホビーストらしい?(要は無責任な…と書くと、怒られちゃうかな?)やり方です。(^
^;
SCI3を例にとって説明しますと、まずは、こんなコードを書いてしまいましょう。
#ifdef SCI3 #undef SCI3 struct st_sci3 SCI3; #endif
これは、「もしSCI3が定義されていたら、一旦、定義を解放し、struct st_sci3 SCI3で再定義し直す」という意味のプログラムです。これを、シリアル通信サンプルの、「#include "ioh83664s.h"」の直後に書き込んで、ビルドします。シミュレータ用の設定がしてあると、ビルド後、結果をダウンロードするかどうか聞いてきますので、ダウンロードしてください。
んで、同じようにインスタントウォッチで、追加してみましょう。
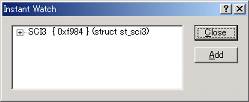
っと。今度はちゃんとそれらしく表示されました。通常のメモリに割り当てているので、あたりまえと言えばあたりまえですが、よかったよかった。これで「Add」してしまいましょ〜。
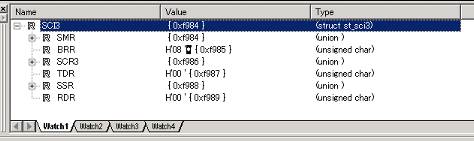
HEW3の下の方に、上のようなウィンドウが追加されたと思います。後は、変更したい変数をダブルクリックして…
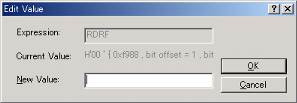
こんなウィンドウがでてきますので、これで変更してやればもう自由自在です。ためしに、シリアル通信サンプルをシミュレータで動作させて、シリアル通信のRDRFでwhileループ待ちになっているところにブレークポイントを設定しておき、停止中に、RDRFを「1」に変更してみてください。
こうすることで、擬似の擬似ですが、I/Oの操作をマネすることができます。
|
KPIT HEW3+GCCでシリアル通信 |
ちょっとラフですがまとめてみました。
ちょっと雑な感じですが、KPIT
HEW3+GCCでH8/3664のプログラムを開発する方法を「Knowledge」の「KPIT
HEW3+GCCでシリアル通信(H8/3664)」にまとめてみました。
いきなりKnowledge行きにしたのは、やはり統合環境、操作の画面キャプチャが多い方がわかりやすいかな?と思って、スクリーンショットをバシバシいれていったら、結構なサイズになってしまったからです。
ところで、力弥さんってご存知ですか?「TekuRobo工作室」というホームページを開設されている方でして、マイコンプログラミング等、難しいことが非常にわかりやすくまとめらている、すごい方です。ロボットを作り始めた頃、マイコンのことや二足歩行ロボットのことをたくさん勉強させていただきました。
で、なんと、力弥さんも同じ頃からKPIT HEW3+GCCを使い始めているとの情報をONOさん経由でゲットしまして、掲示板で少しやりとりさせていただいたのですが、やはりKPITに関しては情報が少ないとのこと。少しでもお役に立てればな〜と思い、急遽、持っているネタをまとめた次第です。
今回まとめた分は、非常に単純な例ですが、近いうちに、TSC16のKPIT上での開発(割り込みルーチンの書き方とか、ソースファイルの分割の仕方など)もまとめてみたいと思っています。
Sフォーマットの出力方法
「KPIT
HEW3+GCCでシリアル通信(H8/3664)」の方にも入れましたが、以前の不定期TOPICにて、Sフォーマット(ROMへの書き込みイメージ)の出力にはOBJCOPYというツールを使う必要があるというのを書きましたが、実は、不要であることがわかりました。
[Options]-[Linker...]でLinker Optionsウィンドウを表示し、[Output]タブをクリックすると、[Output format:]という項目があるのですが、ここを、DefaultからS-Recordに変更すると、あらら、Sフォーマットのファイル(MOTファイル)が出力されます。
な〜んだ、簡単でした。
|
エントリしました。 |
未完成ですが…
G-Tune2004FII、まだ未完成なんですが写真が撮れる状態になったので、ROBO-ONEにエントリしました。あんまり遅い方になっても、ROBO-ONE委員会の方々が大変かな〜と思いまして。まだアップされていないみたいですが、
エントリ写真の全体像はこんな感じです。