|
SANWA "ProBo" 信号解析サンプルプログラム |
AKI-H8/3664によるサンプルプログラム
というわけで、仕上げは、例によってAKI-H8/3664によるサンプルプログラムです。
このプログラムは、GDLの1.5.0.18でコンパイルして確認しています(ふ、古い…)。

サンプルプログラムの処理手順は次のようになります。
- 入力ポートは、P80を使用しています。
- TIMERVを0.1msで割り込みに使用してします。テクニックとしては、GRAのコンペアマッチ割り込み&カウンタクリアで0.1msを作っています。
- そして、割り込み処理の中で、信号が"H"になっているか"L"になっているかを判定し、"L"になっていたら時間を計測します。
- 再び、信号が"L"から"H"になった時に、1つの計測処理が完了します。
- 後はこの計測値から、先日の信号解説のとおり、"L"の長い区間を見つけ出し、次からの信号をCH1、2…として読み取るようにしています。
- これを16bitのデータ(各2ビットがそれぞれのチャンネルに対応)に組み上げます。
- これが2回同じだったら結果値としています。
- そして、main()の方で、結果値の変化検出をし、それを受信データをRS232C出力します。
- 1文字目…0〜8で左側の方向ボタンの押下状態(4で押下なし)
- 2文字目…0〜5で右側の5ボタンの押下状態(0で押下なし)
- 3文字目…0〜2でSW1の位置状態
- 4文字目…0〜2でSW2の位置状態
- 5文字目…0〜1でSW3の位置状態
- 6文字目…0〜1でSW4の位置状態
サンプルプログラムは、ここからダウンロードしてください。
さ〜てと、どのキーをどの操作に割り当てようかな〜。
|
SANWA "ProBo" 信号解説 |
"ProBo"信号仕様
さてさて、制御コントローラ自作派には気になる、受信器の信号出力ですが、この"ProBo"、
シリアルで8ch分の信号を出力します。具体的にどんな形式かというところを図式化しました。
(取り説にはちゃんと載っていますが、書き直してみました)
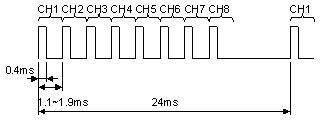
この絵でわかりますように、8ch分の信号を、パルス幅で表現してシリアルで出力しています。 要点をまとめると、以下のようになります。
- 各チャンネルの信号は、1つの信号線で順番に出力される。
- 全体の周期は24msで固定である。
- 各チャンネルデータの前には、0.4ms、信号がHIGH(5V)になる。
- それぞれの信号は、1.1ms、1.5ms、1.9msの3種類の信号幅がある。
この信号幅は、先の0.4msのHIGH時間を含んでいる。
キー操作とチャンネルの関係
キー操作とチャンネル、及び信号幅の関係ですが、次のようになっています。
- 左側の8方向ボタン
CH1、CH2の組み合わせで8方向を表現する。何もキーを押していない場合、CH1、CH2ともに 1.5msの信号幅になる。 - 右側の5ボタン
CH3、CH4の組み合わせで5ボタンを表現する。何もキーを押していない場合、CH3、CH4ともに 1.5msの信号幅になる。 - 中央左側の2つのスイッチ
スライドタイプの3ポジションスイッチで、それぞれCH5、CH6に割り当てられており、 スイッチの位置により1.1ms、1.5ms、1.9msと変化する。 - 中央右側の2つのスイッチ
トグルタイプの2ポジションスイッチで、それぞれCH7、CH8に割り当てられており、 スイッチの位置により1.1ms、1.5ms、1.9msと変化する。
という感じで、各キー操作が8ch分の信号になって出力されます。そんなわけで、この信号解析をするには、以下のようなアルゴリズムになると思います。
まずは、最初の図で言うところの右側の"L"が長い区間を検出します。 これを検出できたら、0.4msの"H"時間を確認し、後の"L"時間をカウントします。 これを8回繰り返して各ボタンの状態を作り出せばいいことがわかります。 "L"の長い区間の検出ですが、1信号あたり最小が1.1ms、最大が1.9msなので、区間最長ケースで 24ms - 1.1ms * 8ch = 15.2ms、最短ケースで、24ms - 1.9ms * 8ch = 8.8msとなります。 というわけで、これぐらいの期間、信号が"L"になっていたらそこを、この区間と判別すればよさそうですね。
これに加えて、各パルスの幅チェックをして、異常だったらまた「長い区間を探す」ような処理にしておき、さらに2回連続で入力された正とするような処理を入れたら、よりいい感じですね!
何はともあれ、これで、H8/3664の少ないI/Oポートを節約することができます。うれしいな〜、4chプロポを普通に繋ぐのと比べると、3つも何かコントロールできるようになります。
明日はいよいよサンプルプログラムです。
ROBO-ONE
DVD到着
Robot-Fanの三月兎さんからROBO-ONEのDVDが到着しました。三月兎さん、いつもありがとうございます。
こうやって映像で連続で見ると、いろいろ発見があります。 実際に会場でロボットの動きを見ていると、移動速度とか機動性の相対比較ってうまくできなくて、 「ああ、なんかあのロボット速かったな〜」ぐらいにしか感じ取れないんですが、こうやって連続で、しかも同じ視点で見ていると、その差がはっきりと見えてきます。
う〜ん、やっぱりG-Tuneは動きがまだまだだな〜。 スペックなどの基本的な問題もあるのですが、やっぱりしゃがみに近い状態で動き回っているのは、スピードの点ではマイナスですね。 次期G-Tuneのコンセプトとして「倍速G-Tune」というのを考えているのですが、動作コンセプトそのものも見直してみたいと思います。 よし、さらにDVDを見まくって研究だ!
|
SANWA "ProBo" |
静岡ホビーショー
5月14、15日に静岡ホビーショーがありますね〜。
今年はSISOも行く予定です。初めて行くのでとても楽しみです。ホビーショーで、サンワさんが ロボット専用コントローラー(送信機+受信器) "ProBo"のデモを行うとの情報をゲットしました。
このリモコン、VSTONEさんの鉄人28号のコントローラにも採用されているものです。 値段は、VSTONEさんのホームページで確認したところ、税込み\31,500で(ここにあります。 なぜかオンラインショップの方から入ると表示できないような気が…)、8ch、クリスタル交換不要で12バンド対応ということを考えると、結構、お買い得な感じがあります。 27MHz、8chラジコンプロポベースにスティック操作ではなくキー操作になっており、12種類の周波数設定をクリスタル交換なしで行え、 シリアル出力ということで、何かと特徴があるリモコンでおもしろそうです。また、デザインも手になじみやすいデザインになっています。
SANWA
"ProBo"
…と、ホビーショーの話をしたところで、なぜかこれがうちにあるので、レポートしてしまいます。



送信器
なかなか思い切ったデザインです。普通のプロポはスティックがついていますが、"ProBo"はすべてキーになっています。
よく、スティック操作をしている時に、スティックの斜め入れに失敗したり変な位置(中間的な位置)に入れてしまって、
思った動作指示が出せなかったりして困ったことがありますが、これならシンプルでいい感じです。
一時、4chプロポをトレーナー機能を使って全部ボタン化しようか悩んでいたことがあるぐらいなので、これはいいです。


左上に8方向キー風のボタン、右上には4方向+真中風のボタン、中央には4つのスライドスイッチと電源スイッチがついています。 このスライドスイッチ、左側の2つは3ポジション、右側の2つは2ポジションになっています。 最初、「どうして右側のスライドスイッチは2ポジションなんだろう〜」って思っていたのですが、 キー操作割り当てを考えていた時に、理由を思いつきました(もし違っていたら、SANWAさん、ごめんなさい)。
左手は方向キーで、割と指を添えっぱなし、右手は比較的動かす方だと思います。 そうすると、ROBO-ONEで格闘時は、右手は右上ボタン以外の操作もやりやすいけど、左手はなるべく離したくないかなと。 そんなわけで、忙しく操作している時でもオペミスをしにくいシンプルな2ポジション(上か下にスライドさせるだけなので、オペミスしにくい)スライドスイッチを右側に配置し、 逆に、デモモード、トーナメントモードみたいな切り替えを行うような操作を左のスライドスイッチ割り当てるような使い方をすると、ちょうどよさそうです。
中ほどには、スイッチと液晶、LEDがついています。このスイッチはバンド切り替えをするためのスイッチで、 液晶には現在設定されている周波数等が表示されます。このセットだけで12バンド対応なのでクリスタルを購入する必要が無く、ありがたいです。また、電源を入れると、LEDがブルーに光ります。 また、アンテナは、脱着式で、ねじって装着します。厚みも、普通のプロポぐらいなので、スティックが無い分、収納性はいいです。



受信器



さて、特徴としては、出力がシリアルなわけですが、シリアルといっても、いわゆるRS232Cのようなシリアルではありません。 1線で8ch分の信号出力を行うようになっています。受信器のFF回路前を解析したことがある方はご存知かもしれませんが、アレです。 0.4msのHIGH時間があって、その後、スティックの位置に応じた時間分だけLOWになり、CH1から逐次出力してくるものです。 Knowledgeのプロポをマイコンで制御にて解説している信号とよく似ていまして、 チャネル数が8になり、最後の0.4usの信号変化が無く、全体の周期が24msになったものになっています。 1つの信号最大長は1.9msなので、1.9ms*8 = 15.2msになります。 全体周期は24msですので、少なくとも約9msはアイドルな時間が存在することになり、プログラムでここを判別すれば割と簡単に信号取り込みできそうです。
そのため、マイコンのポートを1ポート使って時間をチェックするだけで解析をすることができます。マイコンのポートを1つしか使わないので、SIPHA COREにはうれしい仕様です。 ちょっと信号取り込みプログラムを作ってみたのですが、今までR/C受信機の信号取り込みプログラムを書いたことがある人なら全く問題無い感じです。
また、明日にでも、実際にどんな信号が出てくるか?という話をアップしますので、お楽しみに!
|
出先用バッテリーボックス |
先川原さん、かっこいい!
fuRo
---未来ロボット技術研究センター powered by ココログ で、先川原さんが、どうして浦安ROBOTフェスティバルが実現できたか?
という話題を書かれていて、その答えが「おれのところに相談に来たから」と書いてありました。
かっちょいい〜、先川原さん、かっこよすぎますよ〜。SISOはこの手の言葉に弱いです。
思わずコメントを書き込もうと思いましたが、自分ごときが書いてよいものか悩んでしまい書くのはやめました。
でも、こういうのをさらっと言えるのって、かっこいいです。
出先用バッテリーボックスの作成
以前からROBO-ONE等に出向いた時は、単3×6の電池ボックスにNiMH電池を入れて使っています。
さすがに安定化電源持って歩くのも大変なので、これにしているのですが、結構使えます。
ところが、先日アップした通り、プラスチック製の電池ボックスは、やや電流容量不足な感時です。
うちの、幸運にもなかなか使える電池ボックスでさえ、起動の瞬間とかが電流不足になる時があるので、 もっと電流の流せる、秋月電子で売っているキーストーン社の電池ボックスに変えました。
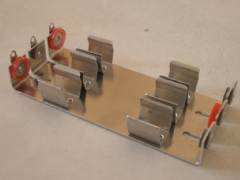
とはいえ、ちょっとこの電池ボックス、前から使っているものと比べると、角ばっててちょっと危ない感じだし、 端子とかも剥き出しです。そんなわけで、取り扱いやすいようにパックバッテリっぽくしました。 ちょうどいいケースがあれば、それでもよかったのですが、丁度いいのが無くて。 充電は、そのまま充電器に接続して行うことにしました。
作り方は…
まずは、端子をラジペンで捻って(捻ると動きます)、隣の端子とあわせます。このとき、フレームに接触しないように注意してやります。
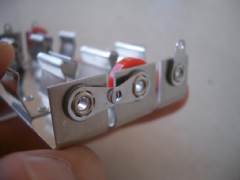
そしてハンダ付けします。ハンダ付けが終わったら、ビニールテープで一応絶縁しておきます。 このパックを落としたりして、この部分が曲がってしまってもショートしないようにするためです。


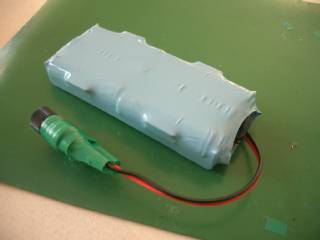
そして、配線します。写真のように、配線してみました。 電線の先っちょの処理ですが、うちでは安定化電源にこのプラグで接続していますので、 これのメスを電線に直接ハンダ付けし、それをビニールテープでぐるぐる巻きにしてあります。


そして、最後は熱収縮チューブ(100円ショップの例のアレ)で包んでドライヤーで暖めます。

うん、いい感じです。
フレームが強度不足なためか、電池をはめるとちょっと反ります。う〜む。まあ、接触には問題がないようなので、良しとします。

電池にハンダ付けしてバッテリパック化するよりも手軽ですし、持ち運びも簡単でいい感じです。 後で、違う種類の電池に変えるときにも、もともと使っていた電池を他のもの(家電とか)に流用するのも簡単。 これでしばらく使って様子を見ようと思います。今回、熱収縮チューブで巻いていますが、 もし、いいケースが見つかったら、ケースにいれて熱収縮チューブはやめ、簡単に電池交換もできるようにしようと思います。
今回、手持ちに単3がいっぱいあったので単3で作りましたが、単2や単1なら、もっと電流が取れるのでよさそうです。 でも、価格的と容量の比からすると単3が一番お得な感じです(^^)。そのあたりはロボットの消費電力に合わせましょう。
ROBO-ONEの控え室とかでこれがあれば机の上に大きな電源を置かなくていいので、ロボットを動かせる面積が増えていいですよ。
|
ロボコンマガジン |
Amazon.co.jpでロボコンマガジン購入
ようやく、前号と最新号のロボコンマガジンをゲットしました。
近所でロボコンマガジンを売っていた本屋が、最近、すぐ売り切れるのか取り扱ってないのかわかんないんですが、買いに行くといつも無いのでAmazon.co.jpで購入しました。
Amazon.co.jpの場合、1500円以上ならば送料無料なので、前号と今回号、2冊まとめて購入です。
最近は、ロボット関係のものはほとんどネットで購入しているのですが、なかなか便利です。
でも、本当は、いっぱい部品が並んでいる店でのんびり部品を眺めたり、本屋でぶらぶらしたいのですが、なかなか時間が取れなくて。 そういえば、近所の子供の頃から通っていた模型屋さんも、しばらく前に店を閉めてしまいました。ネットは便利、でも近所で買わなくなると、店も元気が無くなっていく。悩ましいところです。

|
AKI-H8/3694F購入 |
AKI-H8/3694F
秋月電子でちょっと前に発売になったAKI-H8/3694Fを、とりあえず購入してみました。
なんで「とりあえず」かって言うと、クロックがAKI-H8/3664より速い(25%アップ!)ので期待できるのですが、
クロックが20MHzなので、カウンタを1/8のクロックにすると「0.4us」になって「1us」で管理しずらくなるのが微妙なところですね。
1usで動作させても2usで動作させても変化があるように見えないので、いっそ、2us単位で設定とかするようにしようかな。
期待値はI2Cモジュールの改善。 現在、AKI-H8/3664でシリアルEEPROMと通信するときは、自前のプログラムでやっています。どうもH8/3664のI2Cモジュールを使うと、 他の割り込みと併用した時に通信が止まってしまうためです(不具合と思っているんですが、どうなんでしょう?)。 このあたり改善されているとうれしいな〜というのを期待しています。 もし、I2Cモジュールを使えれば、実測値80kbpsの通信が400kbpsまであがりますので、Action Scriptの切り替え速度がさらにアップして、 Action Script間のジャンプ機能をもっと積極的に使えるようになり、Script作成が楽になるかもです。わくわく。
それはそうと、見た目はまったくといっていいほど変わりません…。よく見るとH8/3694と書いてあります。

そういえばの頂き物
第7回ROBO-ONEで、宇宙ロボコンファイターXさん(リンク先、ここでよかったですか?)から、
むさしまるの光る腕をいただきました。これがきれいに光るんです。スポットライトの下ではちょっと苦しいですが、普通の部屋の中なら、はっきりと光るのがわかります。これ、アクリル板の表面がすりガラス状に仕上げてあって、根元に仕込まれたLEDを点灯させると、全体が光るようになっていて、とてもきれいです。点滅するものならば、もっと明るいところでも見えるかもです。
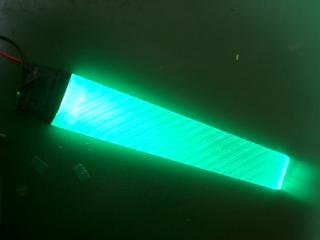
ASURADAさん、これです、これ。(^_^; 宇宙ロボコンファイターXさんのホームページにも、両腕が光っている写真が掲載されています。
|
サーボのトルクってどうやって測るの? |
いちおうトルクも測ってみました。
さて、先日の「うにうに比較」、いかがでしたでしょうか?いちおう、電子秤に10cmの棒を押し付ける方法で、トルクを測ってみました。
やってみるとわかるのですが、どのデータを「公称値のトルク」と言っていいのかよくわからなくなってしまいました。
目的が、「現状、MICRO-MG、またはS03Tを使っている関節を、PRS-3401に置き換えても問題無いか?」ということなので、あくまでも比較用のご参考用ということでお願いします。
さて、計測方法ですが、一応、以下のような感じでやってみました。
- サーボの出力軸中心から秤に触れる場所までは10cm。
- 0度で棒の先が秤に触れないぐらいにしておく。また、このとき水平になるようにする。
- この状態で、目的角度まで動作するパルス値を、一気に入力する。
- 動作後1秒経過したぐらいに、秤の値が割と安定したところをチェック(フラフラします)。

| 目標角度 | MICRO-MG | S03T | PRS-3401 |
| 5度未満 | 「サーボうにうに比較」で推察してください。 | ||
| 5度 | 4.2kg-cm | 2.0kg-cm | 5.2kg-cm |
| 10度 | 6.2kg-cm | 5.2kg-cm | 7.5kg-cm |
| 15度 | 8.4kg-cm | 9.5kg-cm | 10.0kg-cm |
他の方のテストを見ると、重りをぶら下げてやっている方もいますよね。あの方が正しいんでしょうか。 まあ、今回は、比較が目的なので、これでよしとします。このテストの結論としては、PRS-3201は、MICRO-MG、S03T、どちらとも置き換え可能でパワーアップの見込みあり、といえます。 また、先日の「うにうに比較」によりPRS-3201の方が、より繊細に動かせるというのもわかりました。というわけで、次期G-Tuneは、全部PRS-3401で行くことにします。
気づいたこと
PRS-3401を触っていて気づいたんですが、これ、制御パルスを止めるとフリーになります。個人的にはすごくうれしいです。
G-Tuneでは既にアナログサーボがフリーにできることを生かした動作が入っていますので、同じことができそうです。
例えば、一斉にサーボパワーオフ。ROBO-ONEで戦っていると、結構、相手ロボットと絡まることが多いので、こんな時
「一発サーボオフスイッチ」があれば、リモコンでオフできますよね。そうすれば、サーボも壊れないですし。
デジタルサーボは保持し続けると聞いていたので、これはありがたいです。
|
サーボうにうに比較 |
サーボを「うにうに」とさわり比べる
例によって出張してまして、週後半は進捗ほとんど無し…しかも土曜日も移動でつぶれるしで、さみしい週後半でした。とほほ。
さて、今日は、今後のマシーン設計のために、サーボの特性を調べることにしました。現行G-Tuneは、MICRO-MGとS03Tで構成しています。
今回、特性の差に泣かされたこともあり、手持ちのMICRO-MG、S03T、PRS-3401で比較してみました。というわけで、トルク測定用のアームを
引っ張り出してきて、撮影開始。
計測?条件ですが、電源はどれも7.2Vを安定化電源から供給し、一定のパルスを入力し続けておいて手でうにうにします。さすがにサーボホーンを手でうにうにしてもさっぱりわからないので、ABS(4mm厚)の板をつけてうにうにします。後で動画中に出てきますが、この板の長さは軸から先端のとがっている部分までが10cmです。これで大雑把に保持力とか、動きの特性とかがわかるってわけです(ほんとかな?)。その他、トルク測定とかも一応してみたんですが、そっちは後日アップします。
現行G-Tuneが、MICRO-MG+S03Tで動いているわけですが、それをPRS-3401に移行するにあたり、どんなところを気をつけないといけないかな〜とか、どんな特性の差があるかな〜という自分用にチェックしたものですので、あくまでもご参考用に、ということでお願いいたします。

MICRO-MGをうにうに
というわけで、まずはMICRO-MGをうにうにしてみました。こんな感じです。最後の方で「カカカ」といっているのは、デジカメのオートフォーカスの音です。うちのやつ、AFが動く音が入っちゃうんで、いつもMFにして撮影しているんですが、今日は忘れちゃいました。MICRO-MG、結構、しっかりした感じはあるんですが、改めてこうやって触ってみると結構ふにょふにょしています。それでも、5度ぐらい動かせばそこそこのトルク感はあります。
S03Tをうにうに
続いてS03Tをうにうに。うぉ〜、改めて触ってみると、へにょへにょな感じです。しかも、G-Tuneを動かしているときにも思ったのですが、すっと戻らないんです。けっこう力はある感じなんですが、うにうにすると、こんな感じです。そっか〜、これでもG-Tuneはちゃんと動くんだ〜。う〜ん、ある意味すごい。
PRS-3401をうにうに
最後にPRS-3401をうにうに。今までデジタルサーボというものは触ったことが無かったんですが、ふむふむ、なるほど、すごいな〜。やっぱ10cmもある棒をつけると、うにうにすれば結構動きますが、それでも、しっかりしたもんです。これでG-Tuneを作ったら…ふっふっふ。
というわけで、うにうにレポート、みなさまの参考になるでしょうか?ぐぐっと押したときに押し戻される力はPRS-3401の方が強いかな?ぐらいな感じですが、こうやってうにうにしてみるとPRS-3401、やっぱ違いますね〜(値段も相当違いますが)。ロボットの場合、このあたりの繊細な動きがしっかりしているとコントロールしやすいので、今後、楽しみです。
|
INVENTOR8 オーソライズ完了 |
これで安心!オーソライズ完了
INVENTOR8のオーソライズ(使いつづけるための登録みたいなもののようです。)が完了しました。よかったよかった。
これで使い続けることができます。急に図面書きたい欲パワーアップ。結局、メールでAUTODESKさんに問い合わせを
して(普通のサポート窓口から)ROBO-ONEの賞品で頂いたことをお話させて頂いたら、手続きしてくださいまして無事完了です。いや〜、これで安心。
9Pシリアルコネクタを基板につける方法・続編
おかださんからさらに手軽な実装方法を教えてもらいました。
「256(ジゴロー)製作日記」の4月12日のところにあります。
うちでやってみた方法は、「基板用」のコネクタを使っていますが、おかださんが紹介されている方法は「ハンダ付けタイプ」を使用するものです。
さらに部品数少なく、ちょうどあのピンの隙間が基板にピッタリ!というのがびっくりです。今気づきましたが、「ピッタリ」、「ビックリ」、似ています。
いやいや、本題に戻ります。
で、これ思ったんですが、シェル(コネクタのケース)内に基板を固定するものも作れそうですよね!
例えば、パソコンから来ているRS232Cを、ぷちっとかますと「RS232C-I2C変換コネクタ」になるなんてのも、かっこよく作れそうです。他にもいろいろアイデアが…あ〜楽しい♪
|
9Pシリアルコネクタを基板につける方法 |
9Pシリアルコネクタって
先日紹介したAKI-H8/3664用のテストボードですが、シリアル通信用のコネクタは、9Pの基板用のものをつけています。
今回、わりとうまくつけれた(まっすぐにつけれた)ので、方法を紹介します。

この9P基板用のコネクタ、ピンのピッチ間は2.54mmでユニバーサル基板にぴったりな気がするのですが、実は1列目と2列目がずれているため、基板にまっすぐに取り付けることができません。 ところが、よく考えてみると、マイコンに接続するのに最低限必要な線は、GNDとTXD、そしてRXDの3本で、後、短絡するのが1つあるだけです。 しかも、GND、TXD、RXDは、3本とも同じ列にあります。というわけで、「まっすぐ取り付ける」ことに挑戦してみました。
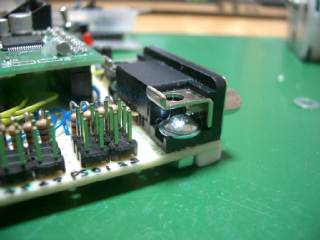
空中配線で短絡させる
- まず、写真のように、不要なピンをカットし、短絡させるピンを手前に折り曲げます。

- 続いて、手前に折り曲げたピンをさらに曲げて、ハンダ付けしてしまいます。先ほどカットしたピンでハンダ付けしてしまえばOKです。


- 完成するとこんな感じで、ピンの意味はそれぞれ、以下の写真のようになります。

- これを基板につけると写真のように、ネジで固定するのにちょうどいい位置に穴がきません。さすがに3ピン1列だけでは強度が足りないので、ネジでぜひとも固定したいところです。瞬間接着剤ぐらいではちょっと苦しいです。

- ここであきらめずに、コネクタについているネジをはずして金具を外すと、本体の穴は楕円になっています。この金具さえなければ、実は穴の位置は気にしなくていいというわけです。
そんなわけで、無造作にネジにあわせて穴をひろげ、ネジで固定します。


- 先ほど外した金具はもういらないのかな〜と思いきや、実は、このネジがないと、コネクタの口側の金具も一緒に取れてしまうので、写真のような向きで金具を付け直し、ネジをしめます。もし、丁度いい接着剤があれば、それでもいいかもしれません。
|
新型テストボード |
100円ショップで買ったケースにぴったり
新しくAKI-H8/3664テスト用のボードを作ってみました。前のテストボードは、秋月電子の72×47mmの基板に組んでいたのですが、今回のは、95×72mmの基板に組んでみました。なんでかと言うと、スペースがもう少し欲しいな〜と思ったのと、100円ショップで売っているケースで、ちょうどいいのがあったからです。こんな感じです。持ち運びに便利!


こんな感じで、ばっちり収納できます。どてっぱらにシリアルコネクタ用の穴をあければ、もっと便利かも・・・。ま、使ってみて、またいろいろ考えようかな〜と思ってます。
今回はちょっとリッチな感じにしました。どの辺がリッチかというと…
- 外部電源、9V電池の両方使用可能(DCジャックの配線をまじめにやりました)。
- そんなわけで、レギュレータも実装(もちろん低損失です)。
- シリアル通信用に9Pのコネクタを装備(しかもまっすぐつけました)。
- 実験用に基板スペースを確保(あたりまえですね…)。
- AKI-H8/3694Fにもつかえるハズ(当然…)。

さて、会社の宿題やるか〜。(T_T)
|
16秒はけっこうあります |
音源ボードにたくさん録音してみる

nishikenさんの音源ボード、いろいろおもしろそうな音源を録音してみました。最初、16秒って短いな〜と思ったんですが、いざ、全メモリ分録音してみると、けっこうありますね〜。 歩く音「ぽよん」、返事1「ぴゅぃ」、返事2「ぴゅうん」、ずっこける「ぽぃぃぃん」、うわ〜、まだまだ録音できます。
録音時のモニター機能が無いので、最初のうちはぴったり録音できなかったのですが、だんだんコツがわかってきました。 再生ツールですが、Windowsについている「サウンドレコーダ」を使うのが一番よさそうです。 これは、再生している間、波形が表示されて、どのあたりを再生しているかが目で確認できるからです。 サウンドレコーダの「再生ボタン」を押しておいて(実は、離した時に再生される)、よっと音源ボードの録音ボタンを押してサウンドレコーダの波形を見ながら、 ちょうどいいところで離せばOK。う〜ん、いい感じです。

このボード、最大16秒の音声データを保持することができるのですが、1.6秒に分割すると、10個までできます。で、この組み合わせは好きにできます。 例えば、「3.2秒、3.2秒、1.6秒、1.6秒…」なんて組み合わせもできます。 録音完了位置を覚えているみたいなので、録音したいデータをどのアドレスにいれるかを再生時間で決めておいて、録音開始アドレスを設定して録音したらOKです。
さて、音がたくさん録音できたので、いよいよマイコンにつないでみようかな〜。お、まつしろさん、もう既にマイコンにつないでます〜。うちも早くつないでみよ〜っと。 (^_^)
|
鼻炎でした。 |
どうも風邪が治らないな〜と思っていたら
なかなか風邪が治らず、身体もだるいので今日は仕事お休み!というわけで、病院にいったら、どうやら、風邪ではなく
鼻炎らしいとのこと。う〜む、既に風邪は治っていたみたい。鼻炎でも人によっては発熱したりすることがあるらしく、
その可能性が一番高そうとのことで。花粉症とは言われてはいないですが、杉花粉の無いところ(某外国)に行っててても
同じ症状は続いていたので、少なくとも杉花粉症ではなさそう。発熱もあったので、爆睡してました。
既に昨日の夕方からほとんど寝ています。我ながら、よく寝れます。
INVENTOR8
オーソライズできない?
インストールした時から「オーソライズできません〜」とINVENTOR8に言われていたのですが、よく見てみたら、これ、
できないと30日で使えなくなっちゃうんでしょうか?そんなわけで、現在、AUTODESKさんに問い合わせ中。なにやら
評価用のため、手続きが必要とのこと。今まで、ROBO-ONEで頂いた方もいらっしゃると思うんですが、みなさん、
どうされているんでしょうか?それとも、何か手続き忘れているのかな〜。
|
MICRO-MGをうまく付き合う方法 |
だいぶ良くなってきましたが、相変わらず風邪がぐずぐずしてて(いや、先週の仕事の忙しさが効いてるかな?)、 イマイチ進みが悪いですが、みなさま、お元気でしょうか? そんなわけで、先週末もなんか、半分ぐらい寝ていました。やっぱり、睡眠はいいです。 まあ、身体が休息を求めているということで、よしとします。
音源ボードおもしろい!
調子が悪い時は、あまり深く考えずに楽しいことを…nisikenさんから頂いた音源ボード、
昨日から本格的に遊びはじめていますが、音が出るって面白いですね〜。パソコンのヘッドホン出力端子につないでちょちょっと録音して。音が再生されると「おお〜」
今、新型マイコンテストボードを作っているので(前のはゴチャゴチャになってきたので、そろそろ交代ということで)、これにつなげて、さらにマイコンからいろいろしてみようと思っています。
MICRO-MGをうまく付き合う方法
最近、PRS-3401ネタが続きましたが、今日はMICRO-MGネタです。
2005/03/27の不定期TOPICで、MICRO-MGの耐久性が云々という話を書きましたが、あれこれいいながらもG-Tuneでは、
MICRO-MG+S03T(HG)にて使ってきているわけでして、MICRO-MGとうまく付き合う方法についてちょっとコツを書きます。
最近、動作データ作りにも慣れてきたせいか、ほとんどサーボを焼くことが無くなったのですが、そのせいか、 MICRO-MGの調子が変わってくることが気になるようになってきました。G-Tuneで動作させた経験からの頻度と対策について、以下に書きます。
- センターずれ
ここで言う「センターがずれてくる」という現象は、1500usの制御信号を入れている位置が変わってくる、 という意味です。MICRO-MG、使い込んでくると、なんか動きが違うな〜という現象にぶつかるのですが、 よく見ていると、決まった方向にサーボの停止位置が変化していることに気づきました。これは、S03Tでも発生するのですが、S03Tの方が傾向が小さいかんじがします。
そんなわけで、SIPHA COREの方で、時々センター位置を再調整することで解決しています。 正確にどれくらいで再調整が必要か?というのは難しいですが、センター位置さえ調整しておけば、 今まで作った動作データというのは特に問題はありません。実際には稼働範囲も少し変わっているのですが、 大きく問題になるほどのものではありません。
頻度ですが、大会前からの動作データ作りを含めて、大会が終わるまで、だいたい10回ぐらい再調整しています。 普通に、毎晩、動作データを1つか2つ、という時は週に1回ぐらいで全然気にならないのですが、 徹夜でガンガン作っているときは結構、ヘヴィな感じです。
そんなわけで、なんかずれてきたからといって、慌てて動作データを見直さずに、この調整をしてやれば結構、使えます。
あとは、GOLDENさんのところでも報告されています(S03Tについてですが、どちらも同じ傾向があると思います)が、 時々、変な位置でサーボが停止する時があります。 GOLDENさんも書かれていますが、ポテンショの抵抗値に、へこみができているのではないかな〜と推測しています。 G-Tuneでは、メカ的にロックされる位置があるのですが、ここで起きました。 メカロックされているのにサーボは、あとほんの少し動こうとする⇒少しプルプルする⇒ポテンショのへこみができるという感じでしょうか。 多かれ少なかれ、どのサーボでも発生しそうなので、気をつけたいところです。
- サーボホーンの穴が開いてくる
サーボホーンのぎざぎざのついた穴のことです。これは、浅草ギ研さんで予備サーボホーンを購入して交換する、またはアルミサーボホーンに変更することで解決することができます。 といっても、すぐにガタが来るというものではなく、G-Tuneだと、ROBO-ONE用に動作データを一通り作って確認した後に、 脚などの負荷のかかりやすいところを交換しているぐらいです。 大会前1ヶ月ぐらいから動作データ作りをしていましたが、その中で交換した回数は、1〜2回です。脚のピッチ軸は2回、他は1回、 場所によっては全然交換してないという感じです。でも、たまに「カキン」とか言ってズレたこともありますので、場所にもよる、という感じでしょうか。
- ギアのガタつき
使っているうちにギアのガタがだんだん出てきます(どのサーボでも一緒だとは思うのですが、他の人の話を聞くと、早めかも)。 サーボを開けてみましたが、よくいうケースの方の軸穴が大きくなっているわけではないようです。 ギアそのものがガタが出てきている感じです。これはギア交換ということになりますが、もともとガタは大きいので、 Oリングを噛ましたりスペーサを噛ましてフリクションを増やす、または、いつも一定方向に加重がかかるように対策を取っていれば、 そんなには気になりません(もともとのガタと比較して)。そんなわけで、特別、ギアのみ交換したことはないです。 深刻になる前に、パワーが落ちてきます。
- その他
サーボの稼働範囲がサーボによって異なりますので、補正ロジックを入れておくことで、交換時のインパクトを減らすことができます。 うちでは、90度動作範囲を計測し、それで補正しています。経験的には「±90度の動作範囲補正+センター位置補正」で充分な感じです。
というわけで、ぜひ、センターを調整する機能実装とか、もし全てパルス値で動作データを作っているのであれば、 それを後で数値変換するしかけを準備されることをオススメします。

写真は、本戦デモを終えてから数回の草試合を終えたG-Tuneのホームポジションです。こんな感じでズレてきます。でも、まだセンター出し調整すれば使えます。
MICRO-MG、安くてパワーもそこそこあっていい感じですが、やっぱり値段で納得な部分もあるわけでして、上記にあげた安定度の問題とか、少々がさつな動きとか、アナログがゆえの保持力(指示値より数度ずれると力がでます)の弱さ等、 安くないサーボと比較すると、何かと気を使う部分はあります。逆にいうと、このあたり気をつけていれば、けっこう使えます。そんなわけで、この情報を、MICRO-MGを使っている方に、またこれから使おうとされている方の参考にしていただければ、と思います。
というわけで、初期投資が抑えられるMICRO-MG、いろいろ期待値大で長い目でみたら安いかもしれないPRS-3401、というところでしょうか。今、PRS-3401に制御信号いれてみてるんですが、PRS-3401、制御パルスを落とすとフリーになるみたい。ラッキー♪後日、確認が取れたらアップします。
|
デジタルノギス |
0.01mmまで計測可能!
以前、浅草ギ研さんのところでデジタルノギスを使っている写真があって、「0.01mmまで測れる」というのを知りました(普通のは0.05mm)。
表示された数値を読むだけですし、いいな〜と思って探していたのですが、遂に買ってしまいました!


う〜ん、箱が大きい。工具を購入すると、いつも箱が大きい気がします。購入先はSTRAIGHTさんです。なぜここにしたかというと、なぜか「青いデジタルノギス」を売っていたんです。 他のところのは、普通に本体がシルバーで液晶表示部分がブラックというのばかりでしたので、ちょっと変わっていていいかな〜と思って、ここにしました。購入価格は、送料やらなんやら(会員カード発行料とか)で\5,045です。思ってたよりは安いですが、やっぱり高い買い物です。
さっそく測ってみました。なんか気持ちいい〜です。でも、0.01mmって、プラスチック部品だと、少しの力入れ具合で変わってしまいますね。あはは。

伝言板コーナー
え〜っと、NEWLIGHTさんへ…PRS-3401のサーボホーンを止めているネジとか、ケースのネジについて教えてくださいませんか?BBSにてか、メールいただけるとありがたいです。